1.本实用新型属于隧道工程检测技术领域,具体涉及一种隧道检测攀爬机器人用中空式承载架。
背景技术:
2.隧道施工过程中,需要对隧道进行衬砌质量检测,常规情况下,工作人员需要手持检测雷达通过专项检测车、脚手架等设备才能检测获得衬砌及衬砌后面等病害信息。该方法存在前期设备投入成本大、需要工作人员的数量多、效率偏低、人为干扰因素大等问题,因此属于行业的技术痛点。因此,空陆两栖爬壁机器人可以提高隧道检测的质量和效率,是一种解决该痛点的有效手段。
3.目前的空陆两栖机器人存在承载能力弱的缺点,无法在搭载较重检测设备的同时,实现飞行和爬行的两种功能,尤其是没有对垂直爬壁状态下的承重能力,因此,亟需通过一种合理的承重框架对这一问题进行解决。
技术实现要素:
4.本实用新型克服现有技术存在的不足,所要解决的技术问题为:提供一种刚度大、自重轻、承载能力强的攀爬机器人用中空式承载架,以实现携带的探地雷达传感器的检测机器人的隧道壁安全行走,并进行隧道质量检测,以提高检测的质量和效率。
5.为了解决上述技术问题,本实用新型采用的技术方案为:一种隧道检测攀爬机器人用中空式承载架,包括上机架板、下机架板和环形杆,所述上机架板和下机架板通过竖向连接柱连接在一起形成主框架,主框架上设置有四个用于容纳旋翼的旋翼腔,四个旋翼腔中心设置有用于容纳电路元件的仪器仓,环形杆固定设置在主框架上,用于依次连接四个旋翼腔,所述环形杆上固定连接有四个沿水平方向设置的连接杆,所述连接杆的一端设置在其中两个旋翼腔之间,另一端用于安装爬行机轮。
6.所述环形杆焊接在所述上机架板上,所述轮轴焊接在所述环形杆上。
7.所述上机架板和下机架板为碳纤维板制成。
8.所述上机架板和下机架板上设置有四个与旋翼腔位置对应的圆形孔。
9.所述环形杆为中空的碳纤维柱构成。
10.本实用新型与现有技术相比具有以下有益效果:
11.本实用新型提供了一种隧道检测攀爬机器人用中空式承载架,通过优化结构受力,采用双层薄板结构为主体,碳纤维框架受力体系,能够在大幅减轻自重的前提下提高结构稳定性,从而实现飞爬两种工作模式,且作为主框架的环形杆为圆环形,在满足了应力要求的前提下极大释放了空间,该空间可满足用于放置电池、用于摄像头转动所需空间等,结构稳定性好,重量轻,负载能力强。
附图说明
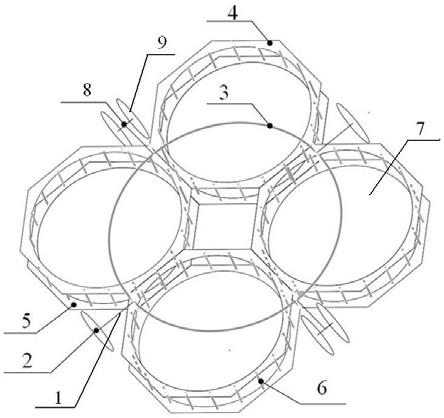
12.图1为本实用新型实施例提供的中空式承载架整体结构示意图;
13.图2为主框架在行走模式下的受力弯矩图;
14.图3为主框架在行走模式下的总变形图;
15.图4为机架板在行走模式下的应变图;
16.图5为爬行状态下主框架的受力弯矩图;
17.图6为主框架在爬行状态下的总变形图;
18.图7为机架板在爬行状态下的应力图;
19.图8为主框架在飞行模式下的受力弯矩图;
20.图9为飞行状态下的框架总变形图;
21.图10为飞行状态下的机架板的应力图。
22.图中:1为连接杆,2为从动轮,3为环形杆,4为上机架板,5为下机架板,6为连接柱,7为旋翼腔,8为主动轮轮轴,9为主动轮。
具体实施方式
23.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.如图1所示,本实用新型实施例提供了一种隧道检测攀爬机器人用中空式承载架,包括上机架板4、下机架板5和环形杆3,所述上机架板4和下机架板5通过竖向设置的连接柱6连接在一起形成主框架,主框架上设置有四个用于容纳旋翼的旋翼腔7,四个旋翼腔7中心设置有用于容纳电路元件的仪器仓,环形杆3固定设置在上机架板3上,用于依次连接四个旋翼腔,所述环形杆3上固定连接有四个沿水平方向,且两两垂直的连接杆1,所述连接杆1的一端设置在其中两个旋翼腔7之间,另一端用于安装爬行机轮。
25.具体地,如图1所示,所述连接杆1中,位于左右两侧的两个连接杆1作为从动轮轮轴,分别连接一个从动轮2,位于前后端的两个连接杆1上分别设置有一个主动轮轮轴8,所述主动轮轮轴8用于设置主动轮9。
26.所述环形杆3焊接在所述上机架板4上,所述轮轴1焊接在所述环形杆3上。
27.所述上机架板4和下机架板5为碳纤维板切割而成,特点在于薄壁、刚度大,其荷载作用下应力较小处打孔减重,薄壁机架板含四个圆形孔,用于机翼防护。
28.所述上机架板3和下机架板7上设置有四个与旋翼腔位置对应的圆形孔。
29.所述连接柱6由轻质高强材料组成,垂直连接上下薄壁机架板,连接点固结。所述多个连接柱均等高。所述环形杆3由碳纤维柱构成,中空柱体。本实用新型整体为中空型一体式结构,极大程度上释放了机身空间,其释放的空间可用于放置电池、摄像机转动等。
30.本实用新型的工作原理和工作过程分为3种模式,建立了梁、壳复合有限元分析模型,对各种模式下的工作状态数值模拟如下:
31.1、行走模式:机器人启动后,驱动四轮行进,此时荷载状态为自重,边界条件为四轮竖向支撑,图2为主框架在行走模式下的受力弯矩图;图3为主框架在行走模式下的总变
形图;图4为机架板在行走模式下的应变图;从结果来看,结构在行走模式下受力均匀,总体变形小,符合使用要求。
32.2、爬行模式:爬行模型为机器人起飞后接触检测壁通过六轮推进,此时,机身90
°
翻转,竖向受重力作用,水平向受压力,四轮为固定边界。图5为爬行状态下主框架的受力弯矩图;图6为主框架在爬行状态下的总变形图;图7为机架板在爬行状态下的应力图;从结果来看,机体刚度达到爬行模式下的要求。
33.3、飞行模式:飞行模式下机器人荷载状态为自重,支撑条件为四机翼的向上升力,图8为主框架在飞行模式下的受力弯矩图;图9为飞行状态下的框架总变形图;图10为飞行状态下的机架板的应力图。从结果看,在飞行模式下,承重框架受力合理,变形量符合要求。
34.综上所述,本实用新型提供了一种空陆两栖攀爬检测机器人用中空式承载架,通过优化结构受力,采用双层薄板结构为主体,碳纤维框架受力体系,能够在大幅减轻自重的前提下提高结构稳定性,从而实现飞爬两种工作模式,且主框架为圆形,在满足了应力要求的前提下极大释放了空间,该空间可用于放置电池、用于摄像头转动所需空间等。
35.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种隧道检测攀爬机器人用中空式承载架,其特征在于,包括上机架板(4)、下机架板(5)和环形杆(3),所述上机架板(4)和下机架板(5)通过竖向设置的连接柱(6)连接在一起形成主框架,主框架上设置有四个用于容纳旋翼的旋翼腔(7),四个旋翼腔(7)中心设置有用于容纳电路元件的仪器仓,环形杆(3)固定设置在上机架板(3)上,用于依次连接四个旋翼腔,所述环形杆(3)上固定连接有四个沿水平方向设置的连接杆(1),所述连接杆(1)的一端设置在其中两个旋翼腔(7)之间,另一端用于安装爬行机轮。2.根据权利要求1所述的一种隧道检测攀爬机器人用中空式承载架,其特征在于,所述环形杆(3)焊接在所述上机架板(4)上,所述连接杆(1)焊接在所述环形杆(3)上。3.根据权利要求1所述的一种隧道检测攀爬机器人用中空式承载架,其特征在于,所述上机架板(4)和下机架板(5)为碳纤维板制成。4.根据权利要求1所述的一种隧道检测攀爬机器人用中空式承载架,其特征在于,所述上机架板(3)和下机架板(7)上设置有四个与旋翼腔位置对应的圆形孔。5.根据权利要求1所述的一种隧道检测攀爬机器人用中空式承载架,其特征在于,所述环形杆(3)为中空的碳纤维柱构成。
技术总结
本实用新型属于隧道工程检测技术领域,具体涉及一种隧道检测攀爬机器人用中空式承载架,包括上机架板、下机架板和环形杆,所述上机架板和下机架板通过竖向连接柱连接在一起形成主框架,主框架上设置有四个用于容纳旋翼的旋翼腔,四个旋翼腔中心设置有用于容纳电路元件的仪器仓,环形杆固定设置在上机架板上,用于依次连接四个旋翼腔,所述环形杆上沿水平方向固定设置有四个轮轴,所述轮轴的一端设置在其中两个旋翼腔之间,另一端分别用于安装一个爬行机轮。本实用新型结构稳定性好,重量轻,负载能力强。载能力强。载能力强。
技术研发人员:王可心 孙辉 刘文俊 魏军 伏浩 胡强 张佳奇 吴树丰 黄亮 周涛 王亚利
受保护的技术使用者:中铁十二局集团第二工程有限公司
技术研发日:2021.08.05
技术公布日:2022/1/28