1.本实用新型涉及机器人技术领域,尤其涉及抓取机器人。
背景技术:
2.抓取机器人是一种能够半自主或全自主工作的智能机器,可以辅助甚至替代人类完成物品抓取、码放等繁杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.现有的抓取机器人常采用真空吸盘进行抓取,吸盘表面需要无尘,否则就会出现抓取不牢或无法抓取的问题,而机器人在闲置时吸盘缺少保护装置,在工作前需要对吸盘进行清洁,增加了操作的不便。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的问题,提出能对吸盘进行防尘保护的抓取机器人。
5.本实用新型的技术方案:抓取机器人,包括机器人主体、与机器人主体转动连接的机械臂以及固定连接于机械臂端部的吸盘组件,所述吸盘组件的一侧转动连接有伸缩杆,所述伸缩杆的一端固定连接有用于对吸盘进行防尘保护的防尘盖,所述防尘盖内卡合连接有能对吸盘组件上的吸盘进行除尘的胶纸柱。
6.优选的,所述防尘盖的内壁开设有与吸盘数量相等的多个安装槽,每个所述安装槽内均弹性连接有用于放置胶纸柱的安装板。
7.优选的,所述安装槽的侧面弹性连接有用于卡在胶纸柱侧面的卡环。
8.优选的,所述防尘盖设有一个能让吸盘进入的开口面。
9.优选的,所述伸缩杆外表面固定连接有负磁铁,所述吸盘组件外表面固定连接有能与负磁铁磁性吸附连接的正磁铁。
10.与现有的技术相比,本实用新型的有益效果是:
11.(1):本申请通过防尘盖的设计,可以在闲置时对吸盘进行防尘保护;
12.(2):本申请通过在防尘盖内增加胶纸柱的设计,可以粘除吸盘表面的尘屑;
13.(3):本申请可以对胶纸柱进行更换。
附图说明
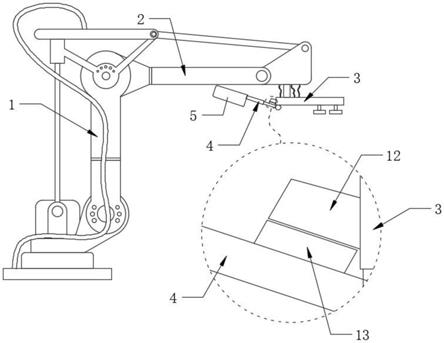
14.图1给出本实用新型一种实施例的结构示意图;
15.图2为图1的防尘盖的剖视图。
16.附图标记:1、机器人主体;2、机械臂;3、吸盘组件;4、伸缩杆;5、防尘盖;6、安装槽;7、竖向弹簧;8、安装板;9、胶纸柱;10、横向弹簧;11、卡环;12、正磁铁;13、负磁铁。
具体实施方式
17.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
18.实施例一
19.如图1所示,本实用新型提出的抓取机器人,包括机器人主体1、与机器人主体1转动连接的机械臂2以及固定连接于机械臂2端部的吸盘组件3,吸盘组件3包括吸盘安装基板以及吸盘,吸盘组件3的一侧通过转轴转动连接有伸缩杆4,伸缩杆4可采用电动伸缩杆或是手动式伸缩杆。伸缩杆4远离吸盘组件3的一端固定连接有用于对吸盘进行防尘保护的防尘盖5。防尘盖5设有一个能让吸盘进入的开口面,便于将防尘盖5旋转覆盖到吸盘外侧。伸缩杆4外表面固定连接有负磁铁13,吸盘组件3外表面固定连接有能与负磁铁13磁性吸附连接的正磁铁12,以便于将防尘盖5固定住,避免对抓取工作造成阻碍。
20.实施例二
21.如图1-2所示,本实用新型提出的抓取机器人,相较于实施例一,本实施例还包括:防尘盖5内卡合连接有能对吸盘组件3上的吸盘进行除尘的胶纸柱9,胶纸柱9由多张相互粘黏的胶纸堆叠组成。防尘盖5的内壁开设有与吸盘数量相等的多个安装槽6,每个安装槽6对应一个吸盘,每个安装槽6内均通过竖向弹簧7弹性连接有一个用于放置胶纸柱9的安装板8。安装槽6的侧面通过横向弹簧10弹性连接有用于卡在胶纸柱9侧面的卡环11。
22.本实施例中,胶纸柱9放在安装板8上,卡环11卡在胶纸柱9两侧用于固定住胶纸柱9,当防尘盖5被旋转至吸盘外侧时,吸盘与胶纸柱9顶部接触,胶纸柱9将吸盘上的尘屑粘除,当上层的胶纸柱9被污染严重后可以将该层撕除,随着胶纸柱9越来越少,竖向弹簧7通过向上的弹性推力推动胶纸柱9上移,从而使胶纸柱9的端部始终可以与吸盘接触。
23.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
技术特征:
1.抓取机器人,包括机器人主体(1)、与机器人主体(1)转动连接的机械臂(2)以及固定连接于机械臂(2)端部的吸盘组件(3),其特征在于:所述吸盘组件(3)的一侧转动连接有伸缩杆(4),所述伸缩杆(4)的一端固定连接有用于对吸盘进行防尘保护的防尘盖(5),所述防尘盖(5)内卡合连接有能对吸盘组件(3)上的吸盘进行除尘的胶纸柱(9)。2.根据权利要求1所述的抓取机器人,其特征在于,所述防尘盖(5)的内壁开设有与吸盘数量相等的多个安装槽(6),每个所述安装槽(6)内均弹性连接有用于放置胶纸柱(9)的安装板(8)。3.根据权利要求2所述的抓取机器人,其特征在于,所述安装槽(6)的侧面弹性连接有用于卡在胶纸柱(9)侧面的卡环(11)。4.根据权利要求1所述的抓取机器人,其特征在于,所述防尘盖(5)设有一个能让吸盘进入的开口面。5.根据权利要求1所述的抓取机器人,其特征在于,所述伸缩杆(4)外表面固定连接有负磁铁(13),所述吸盘组件(3)外表面固定连接有能与负磁铁(13)磁性吸附连接的正磁铁(12)。
技术总结
本实用新型涉及机器人技术领域,尤其涉及抓取机器人。其技术方案包括:包括机器人主体、与机器人主体转动连接的机械臂以及固定连接于机械臂端部的吸盘组件,所述吸盘组件的一侧转动连接有伸缩杆,所述伸缩杆的一端固定连接有用于对吸盘进行防尘保护的防尘盖,所述防尘盖内卡合连接有能对吸盘组件上的吸盘进行除尘的胶纸柱,所述防尘盖的内壁开设有与吸盘数量相等的多个安装槽,每个所述安装槽内均弹性连接有用于放置胶纸柱的安装板。本申请通过防尘盖的设计,可以在闲置时对吸盘进行防尘保护;本申请通过在防尘盖内增加胶纸柱的设计,可以粘除吸盘表面的尘屑;本申请可以对胶纸柱进行更换。进行更换。进行更换。
技术研发人员:谢金华 杨应全 欧阳芳婷
受保护的技术使用者:广东思晨智能科技有限公司
技术研发日:2021.08.02
技术公布日:2022/1/28