1.本实用新型涉及机器人抓取末端执行器技术领域,尤其涉及一种手动快换结构。
背景技术:
2.目前,在零部件抓取行业,同一个工位可能要同时适应多种工件的抓取工作,然而如果工件差异很大的话,同一套抓手无法满足多种工件的需求,我们常用的就是直接加换枪盘装置,机器人侧配备一个换枪盘,每套抓手侧配备一个工具侧换枪盘,这样导致成本过大。如果手动更换手指的话则需要专人来安装至少4颗螺栓并锁紧。由于直接安装的不便不得不造成手指交换的劳动强度加大;同时增加手指交换的时间,影响生产节拍;另外不同的人员换同一套夹手指最终使安装位置很难调整一致,难于实现标准化。
技术实现要素:
3.有鉴于此,有必要提供一种手动快换结构,用以解决手动更换手指效率低,劳动强度大的问题。
4.本实用新型提供一种手动快换结构,包括用于连接机器人的驱动组件以及用于连接两个手指的两快换组件,所述快换组件与所述手指一一对应,所述驱动组件经由两快换组件与所述手指相连接,以供驱使两所述快换组件带动两所述手指夹持工件;两所述快换组件均包括与所述驱动组件相连接的第一连接体、与对应的所述手指相连接的第二连接体以及定位螺栓,所述第一连接体上设置有滑槽以及与滑槽相连通的螺纹孔,所述滑槽与所述螺纹孔相连通且二者的延伸方向相交设置,所述第二连接体上具有一滑动部,所述滑动部与所述滑槽滑动连接,以供所述第一连接体和所述第二连接体可拆卸式滑动连接;所述滑动部上开设有凹槽,所述凹槽设于所述滑动部滑动方向的任意一侧,所述螺纹孔延伸至所述滑动部上的凹槽的运动路径上,当所述凹槽运动至所述螺纹孔的相对位置时,所述凹槽与所述螺纹孔共同形成供定位螺栓穿行的螺合空间,通过所述定位螺栓经由螺合空间卡嵌于所述凹槽,以供相连接的所述第一连接体和第二连接体固定锁止。
5.进一步的,所述滑槽为梯形槽,所述梯形槽的宽度沿所述第一连接体远离所述滑动部的方向渐扩,所述滑动部为梯形块,所述梯形块与所述梯形槽滑动连接。
6.进一步的,所述第一连接体的位于滑槽的端部固定连接有挡板,当所述定位螺栓的自由端卡嵌于凹槽中时,所述挡板与所述第二连接体的滑动部抵触设置。
7.进一步的,该机器人配套多个手指,所述第二连接体的数量为多个、且与多个手指一一对应。
8.进一步的,该机器人需同时使用多个手指,所述快换组件的数量为多个、且与多个手指一一对应。
9.进一步的,所述螺纹孔沿垂直于所述滑槽的延伸方向设置。
10.进一步的,所述驱动组件经由一机器人连接组件与机器人可拆卸连接,所述第二连接体与手指可拆卸连接。
11.进一步的,所述机器人连接组件包括固定臂和机器人连接法兰,所述驱动组件与所述固定臂可拆卸连接,所述固定臂经由所述机器人连接法兰与所述机器人固定连接。
12.进一步的,所述第二连接体经由一连接块与手指可拆卸连接。
13.与现有技术相比,通过设置第二连接体的滑动部上开设有凹槽,凹槽设于滑动部滑动方向的任意一侧,螺纹孔延伸至滑动部上的凹槽的运动路径上,当凹槽运动至螺纹孔的相对位置时,凹槽与螺纹孔共同形成供定位螺栓穿行的螺合空间,通过定位螺栓经由螺合空间卡嵌于凹槽,以供相连接的第一连接体和第二连接体固定锁止,更换时,仅需拧动定位螺栓即可,可大幅缩短生产机械的停机时间,减少人力作业强度,有效提高成型产品的生产效率;同时实现不同的工件适用于同一套抓手的快速交换;重量轻,机械强度和寿命高,结构简单,安装位置可方便调整一致,实现标准化及互换性。
附图说明
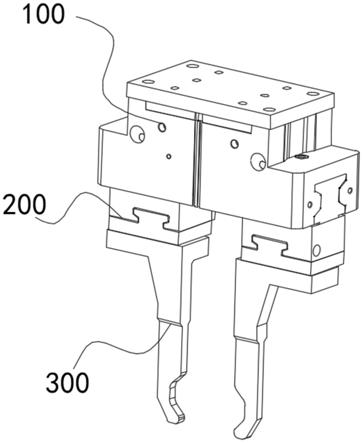
14.图1为本实用新型提供的一种手动快换结构本实施例中整体的结构示意图;
15.图2为本实用新型提供的一种手动快换结构本实施例中整体的爆炸图;
16.图3为本实用新型提供的一种手动快换结构本实施例中定位螺栓的安装示意图;
17.图4为本实用新型提供的一种手动快换结构本实施例中第二连接体上凹槽的结构示意图。
具体实施方式
18.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本技术一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
19.如图1所示,本实施例中的一种手动快换结构,包括用于连接机器人的驱动组件100以及用于连接两个手指300的两快换组件200,快换组件200与手指300一一对应,驱动组件100经由两快换组件200与手指300相连接,以供驱使两快换组件200带动两手指300夹持工件。下面进行更加详细的阐述和说明。
20.可以理解的是,本技术所阐述的“手指300”为机器人的抓取端。
21.本实施方案中的快换组件200与手指300的拆装为人工操作,相比于传统的至少四颗螺栓更换,快换组件200仅需一颗螺栓即可跟换完成,且定位准确。
22.如图2所示,本实施例中的两快换组件200均包括与驱动组件100相连接的第一连接体210、与对应的手指300相连接的第二连接体220以及定位螺栓240,第一连接体210上设置有滑槽以及与滑槽相连通的螺纹孔,滑槽与螺纹孔相连通且二者的延伸方向相交设置,第二连接体220上具有一滑动部,滑动部与滑槽滑动连接,以供第一连接体210和第二连接体220可拆卸式滑动连接。
23.其中,滑动部上开设有凹槽222,凹槽222设于滑动部滑动方向的任意一侧,螺纹孔延伸至滑动部上的凹槽222的运动路径上,当凹槽222运动至螺纹孔的相对位置时,凹槽222与螺纹孔共同形成供定位螺栓240穿行的螺合空间,通过定位螺栓240经由螺合空间卡嵌于凹槽222,以供相连接的第一连接体210和第二连接体220固定锁止。
24.其中,滑槽为梯形槽,梯形槽的宽度沿第一连接体210远离滑动部的方向渐扩,滑
动部为梯形块,梯形块与梯形槽滑动连接。
25.可以理解的是,滑动部以及滑槽也可以采用其他的形状,例如t型、球形等,使滑动部能沿着滑槽在某一直线方向上滑动,且能滑入、滑出滑槽即可。
26.为了能将滑槽准确推动至正对着螺纹孔,本实施例中的第一连接体210的位于滑槽的端部通过螺钉固定连接有挡板221,当定位螺栓240的自由端卡嵌于凹槽222中时,挡板221与第二连接体220的滑动部抵触设置。
27.可以理解的是,当该机器人需要配套多个手指300,通过更换不同的手指300来对应加工不同的零件,此时,第二连接体220的数量为多个、且与多个手指300一一对应。
28.可以理解的是,当加工某个零件时,该机器人需同时使用多个手指300,本实施例中的快换组件200的数量为多个、且与多个手指300一一对应。
29.其中,螺纹孔沿垂直于滑槽的延伸方向设置,当定位螺栓240的自由端穿过螺纹孔时,可完全卡嵌于凹槽222中。
30.本实施例中的驱动组件100经由一机器人连接组件与机器人可拆卸连接,第二连接体220与手指300可拆卸连接,便于维护。
31.其中,机器人连接组件包括固定臂和机器人连接法兰,驱动组件100与固定臂可拆卸连接,固定臂经由机器人连接法兰与机器人固定连接,也可以采用其他的连接结构代替。
32.其中,第二连接体220经由一连接块230与手指300可拆卸连接,也可以采用其他的连接结构代替。
33.本实施例中的驱动组件100为平动两指气爪,也可以采用其他形式的结构代替,只要能够带动两个第一连接体210相对或相背运动即可。
34.可以理解的是,图1、图2中的手指300形状与图3、图4中的手指300形状不同,不同形状的手指300适用于不同的工件。
35.工作流程:更换手指300时,拧下原先固定在机器人上的快拆组件中的定位螺栓240,将原有的手指300的第二连接体220的滑动部滑出滑槽,更换手指300,将更换的手指300上的第二连接体220的滑动部滑入滑槽,直至挡板221与第一连接体210抵接,拧入定位螺栓240,直至定位螺栓240的自由端插入至凹槽222中,即完成整个更换的过程。
36.与现有技术相比:通过设置第二连接体220的滑动部上开设有凹槽222,凹槽222设于滑动部滑动方向的任意一侧,螺纹孔延伸至滑动部上的凹槽222的运动路径上,当凹槽222运动至螺纹孔的相对位置时,凹槽222与螺纹孔共同形成供定位螺栓240穿行的螺合空间,通过定位螺栓240经由螺合空间卡嵌于凹槽222,以供相连接的第一连接体210和第二222连接体固定锁止,更换时,仅需拧动定位螺栓即可,可大幅缩短生产机械的停机时间,减少人力作业强度,有效提高成型产品的生产效率;同时实现不同的工件适用于同一套抓手的快速交换;重量轻,机械强度和寿命高,结构简单,安装位置可方便调整一致,实现标准化及互换性。
37.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。