1.本实用新型涉及一种小型清淤机器人。
背景技术:
2.排水管道或者箱涵是排除城市污水、雨水或者排除公路上雨水的工程设施系统,而这些设施系统一般都在地面以下,并且空间比较小;经过长期的运行,这些设施内容易积累淤泥和杂物,为确保排水畅通需要进行清淤。这类清淤工作的主要困难在于作业环境复杂,施工人员无法一直深入到管道或者箱涵深处,即便能进去清淤,人工手动清淤也使工作效率大打折扣,也会给清理人员带来危险。
3.而针对清理这种小空间环境,采用小型机器人去疏通,将大大减少恶劣环境对施工人员的危害,还能及时清理掉易淤积、堵塞的管道或者箱涵,避免造成污水、雨水滥流,从而避免污染环境和影响交通。
4.但目前的清淤机器人要么体积庞大,不能进入小空间内进行清淤;要么就是功能单一而又价格昂贵,使用一次成本很高,没有清淤、作业闲置不用时,又造成资源浪费;为了实现在小空间内清淤成本低,并实现一机多功能的目的,有必要研究一种小型清淤机器人。
技术实现要素:
5.本技术公开一种小型清淤机器人,其目的在于解决现有清淤机器人体积庞大且功能单一无法满足狭小空间内安全清淤的问题。
6.为达到上述技术目的,本技术采用下述技术方案:
7.小型清淤机器人,包括:行走单元,其包括框架结构、设于所述框架结构底部的行走机构以及设于所述框架结构末端的挂钩;传动单元,其集成于所述框架结构上,所述传动单元包括:潜水电机,其通过一防水电缆与外部电源连接;变频器,其连接并控制所述潜水电机的启闭;液压油泵,其通过联轴器与所述潜水电机相连,所述液压油泵连接一油箱,并通过油路管连通多路阀;四组阀,其与所述多路阀连通,其中两组所述阀分别连接并驱动所述行走机构;另两组所述阀分别与两个油缸连通;通用接头,其分别连接于两个所述油缸上;视觉单元,其包括集成于所述框架结构上的led灯以及防水摄像头;执行单元,其通过通用接头连接于所述油缸上,通过所述油缸带动所述执行单元运动以清淤;控制单元,包括一接收器,其用于接收一遥控器发出的控制指令,并将该控制指令传送给对应的单元。
8.较佳的是,所述行走机构包括四个轮体以及包覆在所述轮体外侧的钢制履带底盘。
9.较佳的是,所述潜水电机固定于所述框架结构的前端部中间位置;所述变频器设于所述框架结构的后端部一侧;所述多路阀和油管路位于所述框架结构的后端部的另一侧;所述液压油泵设于所述油箱的下方并位于所述潜水电机的后方。
10.较佳的是,所述led灯为四个,分别设置在所述框架结构的四个角落上。
11.较佳的是,所述防水摄像头为两个360
°
防水摄像头,两个所述防水摄像头分别设
于所述框架结构的顶部;其用于采集水下画面信息并将该画面信息传送至所述遥控器上。
12.较佳的是,所述框架结构上设有一支架,所述通用接头限制于所述支架上,所述通用接头与所述油缸连通。
13.较佳的是,所述潜水电机由一隔水保护罩密闭保护,所述潜水电机内灌注有循环冷却水。
14.较佳的是,所述遥控器集成有:显示屏,其信号连接所述防水摄像头,用以显示防水摄像头传送来的画面信息;两个模拟量直线手柄,用以控制所述行走机构的前进和后退;两个开关量四向摇杆,用以配合所述两个模拟量直线手柄实现行走机构的转弯和原地旋转;运行指示灯,用以显示正常运作情况;故障指示灯,用于故障时显示提醒;急停旋转按钮,用于紧急停止机器人的运作;启动/喇叭,用于正常清淤工作时发出声音显示工作状态;变频器开关,电性连接并控制所述潜水电机的转速;变速开关按钮,用以控制所述行走机构的速度;预留开关按钮,用于以后机器人需要增加功能所预留;参数调试接口,用以连接外部调试机器;参数存储接口,用以存储所述遥控器所用的资料;有线通讯接口,用于与外部设备交换数据;及电源开关,控制所述遥控器的电源启闭。
15.由于采用上述技术方案,本技术的小型清淤机器人,结构简单,布局精巧,体积得以缩小,可实现水陆两用,便于更换执行设备,能够实现一机多用。
附图说明
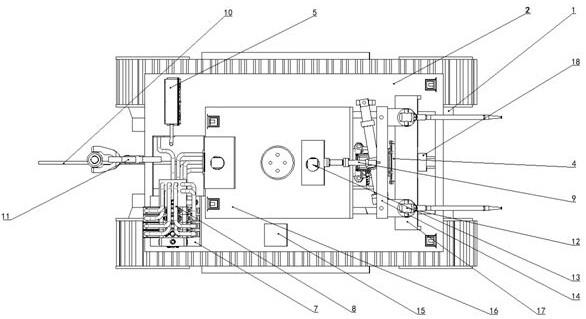
16.图1为本技术的一实施例的结构示意图一;
17.图2为本技术的结构示意图二;
18.图3为本技术遥控手柄的结构示意图一;
19.图4为本技术遥控手柄的结构示意图二;
20.图5为本技术遥控手柄的结构示意图三。
具体实施方式
21.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
22.本技术的小型清淤机器人包含行走单元、传动单元、视觉单元、执行单元和控制单元。
23.参见图1和图2所示,所述行走单元包括框架结构2、设于所述框架结构2下方的行走机构和设于所述框架结构2末端的挂钩11。所述行走机构包括四个轮体以及包覆在所述轮体外侧的钢制履带底盘1。框架结构2为其他单元的零部件提供集成的场所,挂钩11为以后清淤时连接牵引钢丝绳装置所预留。
24.所述传动单元包括防水电缆10、潜水电机4、变频器5、液压油泵6、多路阀7、油管路8、液压马达3、油缸9和油箱17。所述视觉单元包括四个led灯14和两个360
°
防水摄像头13。所述执行单元为两个水炮12,安装在两个油缸9上。所述控制单元包括接收器15和遥控器16。
25.所述接收器15集成在框架结构2上,所述遥控器16上集成了显示屏21、两个模拟量直线手柄22、两个开关量四向摇杆23、运行指示灯24、故障指示灯25、急停旋转按钮26、启动/喇叭27、变频器调速开关28、变速开关按钮29、预留开关按钮30、参数调试接口31、参数
存储接口32、有线通讯接口33和电源开关34。
26.所述传动单元安装在框架结构2上,潜水电机4安装在框架结构2的中间靠清淤机器人前端的位置,通过防水电缆10与外部电源连接,潜水电机4用隔水保护罩密闭保护罩起来,里面加的有循环水,循环水用来给潜水电机4降温,使得机器人能在水下、半水和陆地上都能工作。潜水电机4通过变频器5启动,变频器5安装在框架结构的后端一侧,潜水电机4将电能转化为动能带动液压油泵6转动,潜水电机4与液压油泵6通过联轴器18连接,液压油泵6安装在油箱17的下面,液压油泵6在潜水电机4的后面,油箱17为液压油泵6提供循环油,液压油泵6产生高油压通过油管路8到多路阀7,多路阀7共四组阀,两组阀控制液压马达3,液压马达3再驱动钢制履带底盘1的前进、后退、原地旋转和转弯。一个液压马达3正转、一个液压马达3反转来控制钢制履带底盘1的原地旋转,一个液压马达3动作、一个不动作来控制履带底盘1的转弯。另外两组阀控制两个油缸9动作,油缸9与水炮12连接的部件做成通用接头,换下水炮12,可以换其他的清淤执行单元或者检测仪器,达到一机多用的功能。
27.所述视觉单元中的四个led灯14安装在框架结构2的四个角上,led灯14为清淤机器人照明,两个360
°
防水摄像头用来采集水下画面信息并传输到遥控器的显示屏上,监控管道或箱涵内部的清淤作业情况。
28.本实施例中的所述执行单元为两个水炮12,两个水炮12安装在油缸9上面,两个油缸9控制上面的两个水炮12上下、左右动作,用来冲走箱涵或者管道内的淤泥。所述执行单元并不局限为水炮,其他清淤设备或者检测设备也是可以。
29.所述控制单元的接收器15安装在变频器5的旁边,用来接收遥控器16发出的指令,并传达给其他的单元,遥控器16上集成了显示屏21、两个模拟量直线手柄22、两个开关量四向摇杆23、运行指示灯24、故障指示灯25、急停旋转按钮26、启动/喇叭27、变频器开关28、变速开关按钮29、预留开关按钮30,参数调试接口31、参数存储接口32、有线通讯接口33、电源开关34。
30.所述遥控16上的电源开关34用来启动遥控器,显示屏21用来实时展示清淤环境的图像,所述两个模拟量直线手柄22用来控制机器人的前进和后退,两个开关量四向摇杆23配合两个模拟量直线手柄22来实现机器人的原地旋转和转弯,所述变频器开关28用来控制潜水电机4的转速,所述变速开关按钮29用来控制机器人行走的快慢,所述预留开关按钮,为以后机器人需要增加功能所预留,所述运行指示灯24用来显示机器人的正常运作情况,所述故障指示灯25用来提示机器人出现故障状况,所述急停旋转按钮26在故障指示灯25亮或者需要停止时使机器人停止工作,所述启动/喇叭27用来在机器人清淤时发出声响,以示机器人正在正常清淤工作,所述参数调试接口31用来接外部调试机器,所述参数存储接口32用来存储遥控器所用的资料,所述有线通讯接口33用来与外部设备交换数据。
31.本技术的小型清淤机器人作业步骤如下:
32.当所述清淤机器人在箱涵或者管道内清淤时,施工首先打开地面盖板,利用吊车把清淤机器人吊送到排水管道或箱涵的窨井处,清淤机器人进入箱涵里面,潜水员辅助解开吊车绳扣,消防水带接到高压水车上,与清淤机器人相连的防水电缆10接到地面外部电源上,按下遥控器16上的电源开关34,通过变频器5来启动潜水电机4,潜水电机4开始转动,通过遥控器16来控制清淤机器人向管道或者箱涵内部走去,一边行走,一边用高压水来冲刷管道或箱涵底部的淤泥,使底部淤泥和杂物被冲起,被冲散的淤泥和杂物顺着水流的方
向向前移动,直到到下一个窨井处,工人再把窨井处的淤泥和杂物清理出来,至此完成一个清淤流程;清淤机器人再从管道或者箱涵里退出来,从下一个窨井处继续向前清淤,重复上述步骤,直到清理完;该清淤机器人尺寸比较小,宽和高都不超过1m,适合在小空间内清淤,潜水电机4又用循环水罩着,能一直给电机降温,这使得机器人能在多工况环境条件下作业,并且油缸9上的连接部件做的是通用接口,拿掉水炮12,可以换成其他功能的执行设备,比如换成检测方面的设备,可以检测水下管道设备的好坏等,也就是说可以完成除清淤之外的作业任务,真正实现一机多用。
33.本技术的结构紧凑,且布局精巧,可以大大缩小各部件所占体积,因而相对现有机器人缩小了整体体积。本技术得益于潜水电机以及隔水保护罩,可以适用于不同的工作环境。并通过通用接头的使用,将各执行单元和检测设备可实现一机多用的功能。
34.以上所述的实施方式仅用于说明本实用新型而不用于限制本实用新型的范围。本领域技术人员对本实用新型所做的均等变化与修饰,皆应属于本实用新型所附的权利要求书的涵盖范围。