1.本实用新型涉及一种自动化作业机械,具体与一种高效机器人有关。它主要用于船舶、储罐、管道,钢结构等表面的除漆除锈和表面处理作业。
背景技术:
2.由于船舶、储罐、管道和大型钢结构等露天野外设施,都需要定期做防腐施工,除漆、除锈、打磨、喷涂、切割等,基于环保的要求,不允许采用污染环境的空气喷砂作业。水喷砂虽然没有空气污染,但会严重返锈并产生不可控的废水;在很多环境条件下,搭脚手架或高空作业车作业,费时费力,甚至不便于操作,靠人工安全吊索作业,风险高,效率低;据了解,此前已有专业机器人解决上述问题,但仍不够理想,在结构、可靠、高效上仍有很大的提升空间。
技术实现要素:
3.为了解决现有技术和产品的不足,本实用新型提供一种高效机器人,它结构简洁、性能可靠、工作高效。
4.为了达到上述目的,本实用新型的技术方案是,一种高效机器人,包括:行走机构、工作机构、转向机构,所述的工作机构设在转向机构之下,行走机构有相同的两个,分别设在转向机构两头;
5.所述的行走机构,它是在行走驱动装置前连接传动组件和行走胶轮,控制器a设在行走驱动装置中,行走驱动装置下设有倒角磁铁;所述行走驱动装置中设有电机安装板,在电机安装板上装有伺服电机,伺服电机前依次连接传动组件,即同步带轮a、同步带、同步带轮b、传动轴、减速机、联轴器、蜗杆蜗轮装置、蜗轮中设有差速器;差速器连接左、右两胶轮,蜗杆蜗轮装置设在箱体内;
6.所述的行走伺服电机和同步带、轮外设有防护罩;
7.所述的工作机构,它是在旋转伺服电机前顺次连接齿轮组件、喷头组件、罩体组件,控制器b设在旋转伺服电机之上,所述的罩体组件是在回收罩下连接喷头罩,所述喷头罩为橡塑材料制成,罩体组件上设有高压进水管路和进口、真空抽吸管路及出口以及浮动组件;所述齿轮组件设在齿轮箱中;回收罩设在旋转伺服电机与喷头组件之间、齿轮箱之下,高压进水管路连接至喷头组件;
8.所述的喷头组件可设1-10套;可单行排列,也可两行并排;
9.所述的喷头组件是在x形横杆下设有喷柱、喷嘴,所述的喷柱、喷嘴为4-20个;
10.所述齿轮组件、高压进水管路、真空抽吸管路、浮动组件根据喷头组件的套数多少而配置;
11.所述浮动组件是在螺杆上装有矩形弹簧;
12.所述喷头罩为盘形,其罩口设有一圈魔术贴;
13.所述旋转伺服电机外设有护罩;
14.所述的转向机构,它是在矩形支撑框架左、右两边上分别设有转向驱动装置,其上、下两边的中间设有直线轴承,转向驱动装置两外边设有浮动转轴和防坠吊耳;所述转向驱动装置,它是在关节电机前依次连接有传动轴、星形减速机、转向输出齿轮、扇形齿,关节电机中集合有控制器;
15.所述的转向驱动装置外设有保护罩;
16.本实用新型的有益效果是,它结构简洁、只有行走、转向和工作机构且构件少,性能可靠、密吸效果好,工作高效(高时效、高质效),可设两个以上的表面处理工作头同时工作,效率大增,一次达标,效果优良。
附图说明
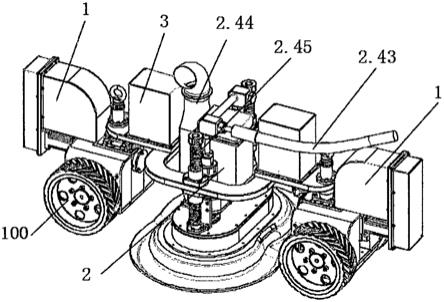
17.图1是本实用新型立体图。
18.图2是本实用新型行走机构主视图。
19.图3是本实用新型工作机构立体图。
20.图4是本实用新型工作机构仰视图。
21.图5是图3a-a向齿轮组件视图。
22.图6是本实用新型喷头组件示意图。
23.图7是本实用新型转向机构主视图。
24.图8是本实用新型转向机构仰视图。
25.图中:
26.100一种高效机器人;
27.1行走机构、1.1行走驱动装置、1.2电机安装板、1.3行走伺服电机、1.4同步带轮a、1.5同步带、1.6同步带轮b、1.7传动轴、1.8减速机、1.9联轴器、1.10蜗杆蜗轮装置、1.11差速器;1.12两胶轮,1.13箱体,1.14倒角磁铁,1.15控制器a;1.16防护罩;
28.2工作机构、2.1旋转伺服电机、2.2齿轮组件、2.3喷头组件、2.31x形横杆、2.32喷柱、2.33喷嘴、2.4罩体组件、2.41回收罩、2.42喷头罩、2.43高压进水管路和进口、2.44真空抽吸管路及出口,2.45浮动组件、2.5控制器b、2.6齿轮箱;2.7护罩;
29.3转向机构、3.1矩形支撑框架、3.2转向驱动装置、3.21关节电机、3.22传动轴、3.23星形减速机、3.24转向输出齿轮、3.25扇形齿;3.3直线轴承、3.4浮动转轴、3.5防坠吊耳;3.6保护罩;
具体实施方式
30.以下结合附图对本实用新型的实施例之一,同时具有两个并排喷头的机型进行说明,应当理解,此处所描述的实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
31.如图1至图8所示,一种高效机器人100,包括:行走机构1、工作机构2、转向机构3,所述的工作机构设在转向机构之下,行走机构有相同的两个,分别设在转向机构两头;
32.所述的行走机构1,它由行走驱动装置1.1、控制器a1.15和两胶轮1.12组成;所述行走驱动装置中设有电机安装板1.2,在电机安装板上装有伺服电机1.3,伺服电机前依次设有同步带轮a1.4、同步带1.5、同步带轮b1.6、传动轴1.7、减速机1.8、联轴器1.9、蜗杆蜗
轮装置1.10、蜗轮中设有差速器1.11;差速器连接左、右两胶轮1.12,蜗杆蜗轮装置设在箱体1.13内,箱体下设有倒角磁铁1.14,行走伺服电机边装有控制器a1.15;
33.采用蜗杆蜗轮结构和差速器,使行走机构直走或变向走稳定可靠;
34.经过精确计算,在爬壁过程中具有足够吸附力的情况下,采用倒角磁铁,以避免行走通过曲面时的磕碰,提高曲面通过能力。
35.所述的行走伺服电机和同步带、轮外设有防护罩1.16;
36.所述的工作机构2,它由旋转伺服电机2.1、齿轮组件2.2、喷头组件2.3、罩体组件2.4、控制器b2.5组成;所述旋转伺服电机输出端连接齿轮组件(见图5),齿轮组件输出端连接喷头组件(见图4和图6),齿轮组件设在齿轮箱2.6中,控制器b设在旋转伺服电机之上;所述罩体组件由回收罩2.41和喷头罩2.42组成,回收罩下连接喷头罩,回收罩设在旋转伺服电机与喷头组件之间、齿轮箱之下,所述喷头罩为橡塑材料制成,回收罩上设有高压进水管路和进口2.43、真空抽吸管路及出口2.44,回收罩上两边对称设有浮动组件2.45,高压进水管路连接至喷头组件;
37.所述的喷头组件可设1-10套;可单行排列,也可两行并排;本实施例是两套喷头组件横排使用,与行走机构互为垂直。
38.所述的喷头组件是在x形横杆2.31下设有喷柱2.32、喷嘴2.33,所述的喷柱、喷嘴为4-20个,在x形横杆下均布;本实用新型设有喷柱、喷嘴8套(见图6);
39.所述齿轮组件、高压进水管路、真空抽吸管路、浮动组件根据喷头组件的套数多少而配置;在本实施例两套喷头组件横排使用的情况下,齿轮组件配置如图5;高压进水管路为一进口两分路,真空抽吸管路为一管路一出口,浮动组件为对称两套(见图1);
40.所述浮动组件是在螺杆上装有矩形弹簧(见图1);
41.由于喷头组件多套同时并用,因此工作效率多倍提高,同时由于喷头上有多路喷嘴,旋转喷进时成了无死角工作面,效果优良,节能降耗缩短工期,实现产用双方双赢。
42.所述喷头罩为盘形,其罩口设有一圈魔术贴;魔术贴有损可及时更换;保证喷头罩不致快速磨损,延长使用寿命。
43.所述旋转伺服电机外设有护罩2.7;
44.所述喷头罩为橡塑材料制成,既保证了足够的强度同时也具有一定的柔性,使之能在矩形弹簧浮动作用下,随时随地贴合工作面,保证渣液不渗漏,不污染环境;
45.所述的转向机构3,包括矩形支撑框架3.1、转向驱动装置3.2、直线轴承3.3、浮动转轴3.4、防坠吊耳3.5;所述矩形支撑框架左、右两边上分别设有转向驱动装置,所述转向驱动装置,它是在关节电机3.21前依次连接有传动轴3.22、星形减速机3.23、转向输出齿轮3.24、扇形齿3.25;直线轴承设在矩形支撑框架上、下两边的中间;所述浮动转轴之上设有防坠吊耳共有两套,分别设在转向驱动装置两外边;所述的转向驱动装置中设有控制器,与关节电机集合在一起,因关节电机体积小,便于做在一起(图中未示出);
46.所述的转向驱动装置外设有保护罩3.6;
47.所述直线轴承回收罩上所设螺杆和矩形弹簧能自由上下浮动,从而保证喷头罩与工作面无缝贴合;所用矩形弹簧截面为矩形,较之普通弹簧更具有很好的弹力和承载能力以及更长的使用寿命。
48.所用浮动转轴可调整补偿行走四轮,使其在工作面高低不平时能自适应。
49.本实用新型凡机电及运动部件均设有防护罩进行保护,以防室外作业损坏。
50.本实用新型配套有配电箱控制系统、超高压水发生器、渣液回收装置以及人机操作界面,通过遥控器对本实用新型进行操作,机器人上设有遥控信号接收控制器;
51.以上所述仅为本实用新型的实施例之一而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。