1.本实用新型涉及机器人技术领域,尤其涉及一种机器人仿真眼。
背景技术:
2.随着无线通讯技术、微电子技术与机械控制的发展,小型模拟机器人取得了飞速发展,不仅在各行各业,普通消费群体家里也开始出现了大小不一、形状各异和功能多样的模拟机器人。在机器人系统中,最重要的功能是人机交互系统,目前的机器人实现了头部、手部、脚部、身体等部位的机械运动,语音识别和语音互动,灯光和灯带显示互动,以及眼部显示互动等功能。
3.现在的机器人眼部显示互动部分一般采用数颗led小灯,或led显示小板,或黑白显示屏,或彩色显示屏,或平面镜片设计搭建。未从眼睛生物模拟角度去考量眼部显示和眼部结构设计,机器人眼部显示单调、呆板,个别甚至脱离了眼部的范畴。在机器人人机互动系统中,眼部显示是机器人的灵魂;现有机器人眼部显示操作一般如下:单一地控制led灯的点亮和熄灭来完成眼睛的睁开和闭合,设计简单的单片机程序控制led显示小板来显示各种眼睛图案,在黑白屏幕上用单调的黑白两色显示各种眼睛图片,彩色显示屏未作结构设计搭建来简洁的显示数张眼睛的图片。这些机器人眼部的显示只是简单地运用电子技术做生物模拟,未考虑生物模拟眼部的真实范畴,不具备生物眼部的灵动、逼真、亮润等特性。
技术实现要素:
4.本实用新型所要解决的技术问题在于,针对现有技术的不足,提供了一种结构紧凑、色彩高清逼真,具备生物眼部的灵动亮润的机器人仿真眼。
5.为了解决上述技术问题,本实用新型是通过以下技术方案实现的:
6.一种机器人仿真眼,包括显示模组、设于显示模组上的光学透镜,显示模组与光学透镜之间还设有固定支架,固定支架用于固定显示模组与光学透镜。
7.优选的,固定支架与光学透镜之间还设有调节垫,所述调节垫用于调节显示模组与光学透镜之间的距离。
8.优选的,所述调节垫为环形片状结构。
9.优选的,所述调节垫为硅胶材质,所述调节垫厚度为1-5mm。
10.优选的,所述调节垫的厚度为3mm。
11.优选的,所述固定支架的中间对应光学透镜的位置设有圆形的通孔,所述光学透镜与通孔同轴心设置。
12.优选的,环绕通孔的周缘设有用于放置或限位光学镜片的环形凸缘。
13.优选的,所述环形凸缘位于通孔的内壁沿径向延伸,或位于固定支架靠近光学透镜的一侧表面沿通孔周缘轴向延伸。
14.优选的,所述光学透镜为凸透镜;所述凸透镜直径为40-60mm,所述凸透镜的焦距为7-10mm。
15.优选的,所述凸透镜直径为50.00mm,凸透镜的焦距8.60mm。
16.优选的,所述通孔的直径小于或等于50mm。
17.优选的,所述调节垫的直径为50mm。
18.优选的,所述显示模组为tft彩色液晶显示屏。
19.优选的,所述显示模组为方形结构,所述显示模组的尺寸为2.0英寸-3.5英寸。
20.优选的,所述显示模组与固定支架之间通过螺钉固定。
21.相比于现有技术,本实用新型的有益效果在于:一种机器人仿真眼,包括显示模组、设于显示模组上的光学透镜,所述显示模组与光学透镜之间还设有固定支架,所述固定支架用于固定显示模组与光学透镜。该机器人仿真眼结构紧凑、显示模组为tft彩色液晶显示屏用于模拟眼睛显示,通过模拟生物的眼部前房,色彩高清逼真,光学透镜为凸透镜,透过带焦距的凸透镜模拟的角膜,全彩逼真生物眼部完美呈现,使可视角度达到-135
°
~+135
°
,在外部观察机器人眼部,眼部逼真高清,灵动亮润,可提高人机交互的体验感。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
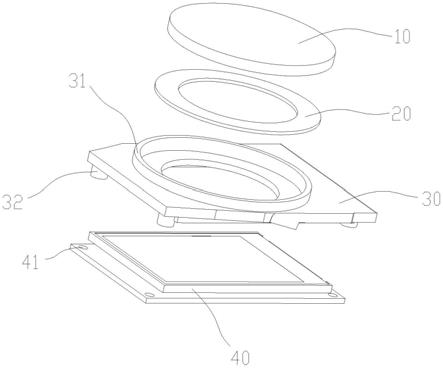
23.图1是本实用新型实施例中一种机器人仿真眼的分解图;
24.图2是本实用新型实施例中一种机器人仿真眼的主视图;
25.图3是图2中沿a-a方向的剖视图;
26.图中:10为光学透镜,20为调节垫,30为固定支架,31为环形凸缘,32为连接柱,40为显示模组,41为连接孔。
具体实施方式
27.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
28.在本技术的描述中,需要理解的是,术语“中间”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.另外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
30.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
31.参考图1-3所示,一种机器人仿真眼,包括显示模组40、设于显示模组40上的光学透镜10,显示模组40与光学透镜10之间还设有固定支架30,固定支架30用于固定显示模组40与光学透镜10。具体的,该机器人仿真眼与机器人内部控制组件电连接,其针对现有的机器人眼睛未从生物模拟角度去考量眼部显示和眼部结构设计,从而导致机器人眼部显示单调、呆板,个别甚至脱离了眼部的范畴。在本实施例中,显示模组40与固定支架30的一侧固定连接,光学透镜10与固定支架30另一侧连接,显示模组40与机器人内部控制装置电连接,通过预设制定程序,使显示模组40显示预设图案,预设图案穿过固定支架30,再从光学透镜10之间折射出来,提高了机器人仿真眼的灵动性和增强了显示的清晰度。
32.在本实施例中,固定支架30的中间对应光学透镜的位置设有圆形的通孔,光学透镜10与通孔同轴心设置。通孔也可以为方形孔或多边形孔;在本实施例中,透镜也为圆形结构。具体的,环绕通孔的周缘设有用于放置或限位光学镜片的环形凸缘31,光学透镜10位于环形凸缘31内且与环形凸缘31粘接,当然光学透镜10也可卡固于环形凸缘31内。在一具体的实施例中,环形凸缘31位于通孔的内壁沿径向延伸,光学透镜10固定于环状凸缘的上端。在另一具体的实施例中,环形凸缘31位于固定支架30靠近光学透镜10的一侧表面沿通孔周缘轴向延伸,光学透镜10固定于通孔的上端,环状凸缘的内部。
33.具体的,固定支架30与光学透镜10之间还设有调节垫20,调节垫20用于调节显示模组40与光学透镜10之间的距离。在本实施例中,调节垫20放置于通孔上的环形凸缘31内,调节垫20为环形片状结构,同时调节垫20为硅胶或聚乙烯材质,由于光学透镜10与显示模组40通过调节焦距实现对显示模组40上的图像进行高清显示,因此需要采用调节垫20调节光学透镜10与显示模组40之间的距离,调节垫20的厚度可根据具体需求设置。
34.具体的,为了更好折射出显示模组40的图案,光学透镜10为凸透镜,显示模组40为tft彩色液晶显示屏;凸透镜的直径可以为40-60mm,焦距可以为7-10mm;在本实施例中,为了更逼真模拟生物的眼部前房,达到色彩高清的效果,凸透镜直径为50.00mm,焦距8.60mm;同时调节垫20的厚度可根据光学透镜10与显示模组40之间的距离选取1-5mm,在本实施例中,调节垫20的厚度为3mm。由于凸透镜放置于通孔的上方,通孔的直径小于或等于50mm,通孔上的环形凸缘31用于限位凸透镜,在本实施例中,凸透镜可视角度达到-135
°
~+135
°
。
35.具体的,显示模组40为方形结构,显示模组40的尺寸可以为2.0英寸-3.5英寸,在本实施例中,显示模组40的尺寸为3.5英寸。显示模组40的四个边角均设有连接柱32,固定支架30的四个边角设有与连接柱32相适配的连接孔41,通过螺钉将连接柱32与连接孔41相连接,以达到显示模组40与固定支架30之间固定连接,当然,显示模组40与固定支架30之间也可采用粘接的方式连接。
36.该机器人仿真眼结构紧凑、显示模组40为tft彩色液晶显示屏用于模拟眼睛显示,通过模拟的生物眼部前房,色彩高清逼真,光学透镜10为凸透镜,透过带焦距的凸透镜模拟
的角膜,全彩逼真生物眼部完美呈现,使可视角度达到-135
°
~+135
°
,在外部观察机器人眼部,眼部逼真高清,灵动亮润,可提高人机交互的体验感。
37.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。