1.本实用新型涉及工具领域,具体的说,涉及一种应用于工业机器人电机拆卸的专用工具。
背景技术:
2.汽车行业中,自动化生产主要是用机器人带动其附属设备,如抓手、焊枪、铆枪等工具配合其他工装设备对车身的各部分零件进行加工及组装。由于现代化工厂自动化率高,生产节拍快,机器的使用率极高,在使用过程中,机器人电机容易损坏,则需要对机器人电机进行更换。机器人电机输出轴上带有花键,安装在机器人减速器输入端的键槽中,并使用螺栓将电机外壳安装在机器人本体上。当机器人电机出现故障时,需要将发生故障的电机从机器人本体上拆卸下来更换。但是在拆除电机时常会出现以下问题:
3.1、由于机器人电机的花键与减速器键槽配合紧密,且由于重力作用,使电机的键与减速器键槽之间存在一定的啮合力,使电机不能轻易的拔出。
4.2、虽然机器人电机与本体连接部位预留有撬动槽,但撬动电机时的施力方向与电机输出轴方向不平行,在撬动电机时会增大键与键槽之间的摩擦力。
5.3、机器人本体上电机安装位置空间狭小,操作者在拆除过程中容易夹伤手部。
6.4、机器人电机重量较重且无合适的着力点,在电机搬运及取出过程中费时费力。
7.因此,需要设计机器人电机拆卸专用工具以解决上述问题。
技术实现要素:
8.本实用新型的目的在于克服上述现有技术存在的问题,而提供一种应用于工业机器人电机拆卸的专用工具,使电机拆卸更加安全省力。
9.本实用新型解决技术问题采用如下技术方案:一种应用于工业机器人电机拆卸的专用工具,包括夹臂和锁紧件;所述夹臂包括可分离的第一夹臂和第二夹臂,所述锁紧件用于连接第一夹臂和第二夹臂;所述第一夹臂具有第一夹紧部和第一夹持部,所述第二夹臂具有第二夹紧部和第二夹持部;所述第一夹紧部外侧中部设置有带第一连接孔的拉拔件,所述第一夹紧部两端分别设置有远离第一夹持部的第二连接孔和靠近第一夹持部的第三连接孔,用于锁紧件通过;所述第二夹紧部第一端设置有夹臂连接环,所述第二夹紧部第二端设置有贯通第二夹紧部上侧和所述第二端端部的卡槽,用于容纳锁紧件。
10.进一步的,所述第一夹臂和第二夹臂为l型。
11.进一步的,所述夹臂连接环为两个,分别设置在第二夹紧部第一端的两侧,两个夹臂连接环之间形成容置腔,用于容纳第一夹臂。
12.进一步的,所述第二连接孔和卡槽为长孔,使锁紧件可以在其中移动。
13.进一步的,所述锁紧件包括用于锁紧第一夹臂和第二夹臂两端的锁紧螺杆和锁紧螺栓,所述锁紧螺杆的一端设有通孔,用于容纳连接锁紧螺杆和第二夹臂的定位销。
14.进一步的,所述卡槽侧面设有长孔,使定位销可以在长孔中移动。
15.进一步的,所述第一夹持部包括与第一夹紧部固定连接的连接杆、连接板和夹爪;所述第二夹持部包括与第二夹紧部固定连接的连接杆、连接板和夹爪。
16.进一步的,所述夹爪的宽度宽于连接杆的宽度,以增加夹持面积。
17.进一步的,所述夹爪内表面上设置有胶垫。
18.进一步的,所述专用工具还包括与拉拔件可拆卸连接的拉环或撞锤。
19.本实用新型的应用于工业机器人电机拆卸的专用工具的优点是:
20.(1)在电机拆卸时使用工具夹紧电机不需要操作者直接用手进行拉拔,消除了夹伤操作者手部的可能。
21.(2)使用工具拉拔电机的受力方向与电机输出轴方向一致,操作省时省力。
附图说明
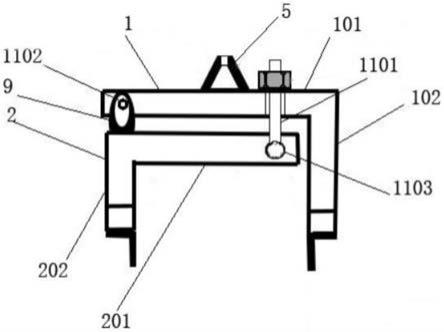
22.图1为本实用新型应用于工业机器人电机拆卸的专用工具的结构示意图。
23.图2a为本实用新型应用于工业机器人电机拆卸的专用工具第一夹臂的结构示意图。
24.图2b为本实用新型应用于工业机器人电机拆卸的专用工具第二夹臂的结构示意图。
25.图3为本实用新型应用于工业机器人电机拆卸的专用工具第一实施例结构示意图。
26.图4为本实用新型应用于工业机器人电机拆卸的专用工具第二实施例结构示意图。
27.图中:(1)第一夹臂;(2)第二夹臂;(101)第一夹紧部;(102)第一夹持部;(201)第二夹紧部;(202)第二夹持部;(301)连接杆;(302)连接板;(303)夹爪;(4)胶垫;(5)拉拔件;(6)第一连接孔;(7)第二连接孔;(8)第三连接孔;(9)夹臂连接环;(10)卡槽;(1101)锁紧螺杆;(1102)锁紧螺栓;(1103)定位销;(12)电机;(13)拉环;(14)杠杆;(15)撞锤;(1501)拉杆。
具体实施方式
28.为使本实用新型的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本实用新型进一步详细说明。
29.在本实用新型的描述中,需要理解的是,术语“内”、“外”、“外侧”、“上侧”、“端部”、“端面”、“侧面”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。术语“垂直”、“平行”等指大致垂直、平行,可以有一定的角度偏差。
30.本实用新型一种应用于工业机器人电机12拆卸的专用工具,如图1所示,包括夹臂和锁紧件;所述夹臂包括可分离的第一夹臂1和第二夹臂2,所述锁紧件用于连接第一夹臂1和第二夹臂2;如图2a和2b所示,所述第一夹臂1和第二夹臂2优选的为l型,所述第一夹臂1
具有第一夹紧部101和第一夹持部102,所述第二夹臂2具有第二夹紧部201和第二夹持部202;所述第一夹紧部101外侧中部设置有带第一连接孔6的拉拔件5,优选的,所述拉拔件5为梯形,通过焊接等方式固定连接在第一夹紧部101的中部,梯形的底边与第一夹紧部101相平行。所述第一连接孔6为设置在拉拔件5外侧底边中部与夹紧部垂直的带有内螺纹的螺纹孔,在使用时,所述电机12拆卸专用工具可以和拉环13或者撞锤15配合使用,拉环13或撞锤15通过第一连接孔6和拉拔件5相连接,通过拉环13或撞锤15将电机12拉出机器人本体,使电机12拆卸时更加省力。如图2a,所述第一夹紧部101两端分别设置有远离第一夹持部102的第二连接孔7和靠近第一夹持部102的第三连接孔8,用于锁紧件通过。如图2b,所述第二夹紧部201第一端设置有夹臂连接环9,优选的,所述夹臂连接环9为两个,分别设置在第二夹紧部201第一端的两侧,两个夹臂连接环9之间形成u型槽,用于容纳第一夹臂1,所述夹臂连接环9上的设有通孔,和第二连接孔7相对应,用于安装锁紧件,可选的,所述锁紧件为锁紧螺栓1102;所述第二夹紧部201第二端设置有贯通第二夹紧部201上侧和所述第二端端部的卡槽10,所述第三连接孔8与第一夹紧部101垂直,卡槽10和第三连接孔8相对应,也用于安装锁紧件,优选的,所述锁紧件为锁紧螺杆1101,所述锁紧螺杆1101的一端设有通孔,用于容纳连接锁紧螺杆1101和第二夹臂2的定位销1103,而且可以使锁紧螺杆1101沿着定位销1103稍微转动,对第一夹持部102和第二夹持部202之间的距离和方向进行微调。所述第一夹持部102包括与第一夹紧部101固定连接的连接杆301、连接板302和夹爪303;所述第二夹持部202包括与第二夹紧部201固定连接的连接杆301、连接板302和夹爪303。优选的,所述夹爪303的宽度宽于连接杆301的宽度,以增加夹持面积,所述夹爪303内表面上设置有胶垫4,用于防滑和保护电机12表面。
31.使用时,将锁紧螺杆1101卡入卡槽10后,将第一夹紧部101扣在第二夹紧部201上方,使螺杆可以穿过第三连接孔8;第一夹紧部101放置在两个夹臂环之间的u型槽中,使两个夹臂连接环9上的通孔能够和第二连接孔7对齐,将锁紧螺栓1102穿过两个夹臂连接环9上的通孔和第二连接孔7,将两个夹爪303放置在电机12的两侧后,用螺母紧固,锁紧第一夹臂1和第二夹臂2的一端,将定位销1103穿过卡槽10长孔和螺杆通孔,拧紧螺母,可锁紧第一夹臂1和第二夹臂2的另一端,从而夹紧电机12。为了减轻工具重量,优选的,所述第一夹紧部101和第二夹紧部201使用槽钢制作,卡槽10可以贯通第二夹紧部201的上侧,使螺杆卡在卡槽10中,也可以同时贯通第二夹紧部201的下侧,使螺杆穿过卡槽10。优选的,可以将第二连接孔7和卡槽10设置为长孔,使锁紧件可以在长孔中移动,所述卡槽10侧面也相应设置为长孔,当锁紧螺杆1101在卡槽10中移动时,使定位销1103也可以相应的在长孔中移动,从而可以调整两个夹爪303之间的距离,使电机12拆卸专用工具可以适用于不同大小的电机12的拆卸。
32.实施例一
33.所述电机12拆卸专用工具可以配合拉环13或撞锤15使用,使拉拔电机12的受力方向与电机12输出轴方向一致,操作更加省力,也不需要操作者直接用手进行拉拔,消除了夹伤操作者手部的可能。如图3所示,为本实用新型应用于工业机器人电机12拆卸的专用工具第一实施例结构示意图,本实施例中,专用工具和拉环13、杠杆14配合使用。拆卸电机12时,先将机器人轴固定好,拆卸电机12固定螺栓及电机12线束,将电机12拆卸专用工具安装在机器人电机12上,拧紧夹紧螺母,将电机12夹紧后,将拉环13一端拧入第一连接孔6与拉拔
件5连接,使用杠杆14穿入拉环13后卡在机器人本体上,向上提拉杠杆14的另一端即可将电机12拔出。
34.实施例二
35.如图4所示,为本实用新型应用于工业机器人电机12拆卸的专用工具第二实施例结构示意图,由于部分电机12的拆卸时找不到合适的杠杆14着力点,使用不便,因此,可以将专用工具和撞锤15配合使用,使电机12拆卸时更加方便。拆卸电机12时,先将机器人轴固定好,拆卸电机12固定螺栓及电机12线束,将电机12拆卸专用工具安装在机器人电机12上,拧紧夹紧螺母,将电机12夹紧后,将撞锤15的拉杆1501一端拧入第一连接孔6与拉拔件5连接,向后拉动撞锤15,利用撞锤15的惯性力将电机12拔出。为了使拉环13或撞锤15与连接件连接更紧固,可以将拉环13或者撞锤15拧入第一连接孔6后,用螺母锁紧。
36.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。