1.本发明涉及轨道机器人领域,特别是涉及带滑动轨道的有轨机器人。
背景技术:
2.目前,大多数轨道机器人可广泛应用于电力巡检领域,通过搭载摄像头,可代替人工在恶劣和特殊环境下执行特殊巡检任务或定制性巡检任务。常见的有轨机器人,通常结构包括有一滑动轨道和设置在滑动轨道上的行走机构,该行走机构上可搭载摄像头,该摄像头可用于实际采集巡检线路上的视频信息。从供电方式上来说,目前带滑动轨道的有轨机器人,一般是通过拖缆方式进行有线方式的供电,或者通过搭载较大容量的蓄电池实现续航。并且,在一些先进方案中,还可通过程序控制,由有轨机器人自主确定是否返航进行充电。但是,发明人发现,目前两种方案均存在不便。例如,采用拖缆方式的供电,可能增加设备运行隐患。而采用蓄电池方式则存在续航时间较短的问题。即使是通过充放电控制,实现其可自主返航进行在轨充电桩的充电,仍然可能导致巡检工作中断,因此实际任务完成效率不佳。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的目的是提供一种可以实现长时间在轨巡检而不存在续航问题的带滑动轨道的有轨机器人。
4.为了实现上述目的,本发明一个方面提供的带滑动轨道的有轨机器人,包括滑动轨道和滑动设置在所述滑动轨道上的行走机构,所述行走机构的下方挂载设置有一对巡检线路进行实时图像采集的摄像头,其中,所述滑动轨道的相对两侧形成有滑槽,所述行走机构包括一t形安装架和相对设置在所述t形安装架上的行走轮机构,所述行走轮机构至少包括对设的行走轮,所述行走轮滚动抵接在所述滑槽位于底部的槽壁上,所述t形安装架上还设置有驱动所述行走轮的伺服电机,所述t形安装架外侧覆盖安装有两侧相对的第一防爆壳体和第二防爆壳体,所述第一防爆壳体和/或所述第二防爆壳体上,设置有与所述伺服电机及所述摄像头电性连接的供电接口,所述供电接口至少包括第一导电刷和第二导电刷,所述第一导电刷及所述第二导电刷沿供电线路滑动且构成电性连接。
5.作为优选,所述行走轮包括对设在所述t形安装架上的两个主动轮,以及与所述主动轮共线且相对设置在所述t形安装架上的两个从动轮。
6.作为优选,所述伺服电机的输出端与一变速箱连接,所述变速箱的输出端通过链轮传动机构与所述行走轮机构传动连接,所述链轮传动机构包括与所述变速箱连接的第一链轮以及与所述行走轮机构连接的第二链轮,所述第一链轮与所述第二链轮之间设置有链轮皮带。
7.作为优选,所述从动轮的一侧,还设置有滚动设置在所述滑槽的槽底的导向轮机构。
8.作为优选,所述导向轮机构包括设置在所述t形安装架上的立柱以及设置在所述
立柱上的导向轮。
9.作为优选,所述第一防爆壳体和/或所述第二防爆壳体上,还设置有用于检测所述行走机构在所述滑动轨道上的行走路线是否偏移的偏移传感器。
10.作为优选,所述偏移传感器为霍尔位移传感器,且其包括设置在所述第一防爆壳体上的第一传感器,以及设置在所述第二防爆壳体上的第二传感器。
11.作为优选,所述t形安装架上,相对的两侧各设置有一z形挂架,所述z形挂架至少部分地穿过所述第一防爆壳体或第二防爆壳体,以使所述第一防爆壳体或第二防爆壳体在开启时,可呈开启状态下挂载在所述z形挂架上。
12.作为优选,所述第一防爆壳体和/或所述第二防爆壳体上,还设置有一与所述滑槽的内侧槽壁抵接的刮板,所述刮板构造为对所述滑槽的所述内侧槽壁进行清洁。
13.作为优选,所述刮板与所述内侧槽壁抵接的部分构造为刮板端部,且至少所述刮板端部由橡胶材质制成。
14.与现有技术相比较,本发明提供的带滑动轨道的有轨机器人,可通过导电刷形式的供电接口提供供电,不需要单独设置蓄电池或者随动的线缆,因此具有运行安全性高,且不存在续航问题,可适用于需要全天不间断运行的巡检环境。
附图说明
15.图1为本发明的带滑动轨道的有轨机器人的结构示意图。
16.图2为本发明的带滑动轨道的有轨机器人的俯视结构示意图。
17.图3为本发明的带滑动轨道的有轨机器人的立体结构示意图。
18.图4为本发明的带滑动轨道的有轨机器人的另一个立体结构示意图(隐去部分壳体)。
19.图5为本发明的带滑动轨道的有轨机器人的再一个立体结构示意图(隐去全部壳体)。
20.附图标记:
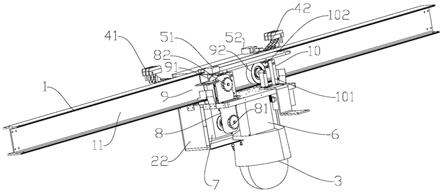
21.1-滑动轨道;2-行走机构;3-摄像头;4-供电接口;5-偏移传感器;6-伺服电机;7-变速箱;8-链轮传动机构;9-行走轮机构;10-导向轮机构;11-滑槽;20-刮板;21-第一防爆壳体;22-第二防爆壳体;23-z形挂架;24-t形安装架;41-第一导电刷;42-第二导电刷;51-第一传感器;52-第二传感器;81-第一链轮;82-第二链轮;91-主动轮;92-从动轮;101-立柱;102-导向轮;201-刮板端部。
具体实施方式
22.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
23.此处参考附图描述本发明的各种方案以及特征。
24.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
25.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都
位于借此所限定的保护范围内。
26.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
27.如图1至图5所示,本发明一个实施例提供的带滑动轨道的有轨机器人,包括滑动轨道1和滑动设置在所述滑动轨道1上的行走机构2,所述行走机构2的下方挂载设置有一对巡检线路(图中未示出)进行实时图像采集的摄像头3,其中,所述滑动轨道1的相对两侧形成有滑槽11,所述行走机构2包括一t形安装架24和相对设置在所述t形安装架24上的行走轮机构9,所述行走轮机构9至少包括对设的行走轮(图中未标注),所述行走轮滚动抵接在所述滑槽11位于底部的内侧槽壁上,所述t形安装架24上还设置有驱动所述行走轮的伺服电机6,所述t形安装架24外侧覆盖安装有两侧相对的第一防爆壳体21和第二防爆壳体22,所述第一防爆壳体21和/或所述第二防爆壳体22上,设置有与所述伺服电机6及所述摄像头3电性连接的供电接口4,所述供电接口4至少包括第一导电刷41和第二导电刷42,所述第一导电刷41及所述第二导电刷42沿供电线路滑动且构成电性连接。在本发明中,并未图示出供电线路,但本领域技术人员应可以理解,以滑动接触方式实现电性连接的技术方案,均可实现本发明。而针对电路部分,本领域技术人员也可根据实际情况做出与之对应的连接设计。
28.图4和图5示出了本发明中的带滑动轨道的有轨机器人的行走机构2的内部结构示意图,如图所示,所述行走轮包括对设在所述t形安装架24上的两个主动轮91,以及与所述主动轮91共线且相对设置在所述t形安装架24上的两个从动轮92。进一步地,图4和图5还示出了,所述伺服电机6的输出端与一变速箱7连接,所述变速箱7的输出端通过链轮传动机构8与所述行走轮机构9传动连接,所述链轮传动机构8包括与所述变速箱7连接的第一链轮81以及与所述行走轮机构9连接的第二链轮82,所述第一链轮81与所述第二链轮82之间设置有链轮皮带(图中未示出)。在这样的结构中,伺服电机6可通过变速箱7及链轮传动机构8驱动行走轮机构9。
29.在一些优选实施方式中,作为优选,所述从动轮92的一侧,还设置有滚动设置在所述滑槽11的槽底的导向轮机构10。具体地,所述导向轮机构10可包括设置在所述t形安装架24上的立柱101以及设置在所述立柱101上的导向轮102。
30.另外,为了防止行走机构2在所述滑动轨道1上发生偏移,所述第一防爆壳体21和/或所述第二防爆壳体22上,还设置有用于检测所述行走机构2在所述滑动轨道1上的行走路线是否偏移的偏移传感器5。具体地,所述偏移传感器5为霍尔位移传感器,且其包括设置在所述第一防爆壳体21上的第一传感器51,以及设置在所述第二防爆壳体22上的第二传感器52。
31.再者,由于设置了防爆外壳,因此,本发明的有轨机器人在对行走机构进行检修时,为了提升便利性,所述t形安装架24上,相对的两侧还可各设置有一z形挂架23,所述z形挂架23至少部分地穿过所述第一防爆壳体21或第二防爆壳体22,以使所述第一防爆壳体21或第二防爆壳体22在开启时,可呈开启状态下挂载在所述z形挂架23上。
32.在实际生产中,尤其在针对输煤皮带进行巡检的工况下,可能存在大量粉尘,当粉尘积聚在滑动轨道1上时,很可能对有轨机器人的运行造成影响,为了解决这一问题,所述第一防爆壳体21和/或所述第二防爆壳体22上,还设置有一与所述滑槽11的内侧槽壁抵接
的刮板20,所述刮板20构造为对所述滑槽11的所述内侧槽壁进行清洁。当然,所述刮板与所述内侧槽壁抵接的部分构造为刮板端部201,且至少所述刮板端部201由橡胶材质制成,以此避免对滑槽11造成损伤。
33.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。