1.本发明涉及机器人领域,更具体的说是一种组装机器人。
背景技术:
2.工业生产中,对于带轮、皮带和轴的装配和固定因其不同需要,所需的装配方式不同,特别是大型带轮的装配为保障与皮带的紧密配合,需要较大的驱动力进行装配,而采用人工方式除了操作安全性低之外,效率也大打折扣,为此,提供一种组装机器人以克服上述问题。
技术实现要素:
3.本发明提供一种组装机器人,目的是可以便于装配大型带轮和皮带。
4.上述目的通过以下技术方案来实现:
5.一种组装机器人,包括顶架,以及两个对称设置的撑托机构;
6.其中所述撑托机构包括机架,以及转动连接在机架上的两个双向丝杠,以及驱动其中一个双向丝杠转动的驱动电机ⅰ,以及两个臂组件,所述两个双向丝杠通过传动件同步传动连接;其中所述臂组件包括基座ⅰ,以及固接在基座ⅰ下端的撑臂;两个基座ⅰ分别螺纹连接在双向丝杠的前后两侧,机架通过顶架支撑。
7.所述撑托机构还包括驱动机架靠近和远离另外一个撑托机构的伸缩机构ⅰ;伸缩机构ⅰ安装在顶架上。
附图说明
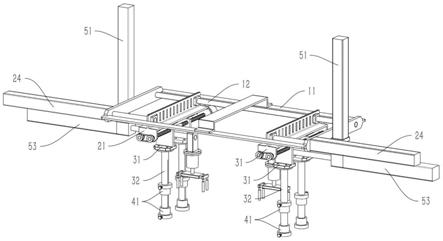
8.图1和2显示了撑托机构和抓取机构;
9.图3显示了顶架;
10.图4显示了撑托机构;
11.图5显示了杆套、凸环、键和预紧件;
12.图6显示了抓取机构;
13.图7显示了抓取机构的局部;
14.图8显示了支撑件的一种使用方式;
15.图9显示了支撑件;
16.图10显示了托举机构。
具体实施方式
17.一种组装机器人,参看图1至4,包括顶架11和两个对称设置在顶架11左右两侧的撑托机构;
18.所述撑托机构包括机架21、两个双向丝杠22、电机ⅰ23和两个臂组件;所述臂组件包括基座ⅰ31、撑臂32和支撑杆ⅰ12;
19.双向丝杠22前后延伸设置,双向丝杠22的前后两端分别转动连接在机架21的前后两端,两个双向丝杠22通过带轮皮带组件同步传动连接,电机ⅰ23的输出轴与其中一个双向丝杠22固接,电机ⅰ23固接在顶架11上;撑臂32固接在基座ⅰ31的下端,撑臂32固接在撑臂32的下端;其中一个基座ⅰ31螺纹连接在两个双向丝杠22的前侧,另外一个基座ⅰ31螺纹连接在两个双向丝杠22的后侧。
20.通过启动电机ⅰ23带动双向丝杠22转动以改变两个撑臂32的间距,四个撑臂32用于撑开固定不同规格的传动带,以便于与带轮的组装;
21.进一步的,所述撑托机构还包括伸缩机构ⅰ24,伸缩机构ⅰ24的外壳固接在顶架11上,伸缩机构ⅰ24的活动端与机架21固接;也可以增加支撑杆ⅰ12,使机架21滑动连接在支撑杆ⅰ12上,增加平稳性。
22.启动两个伸缩机构ⅰ24用于调节两个机架21的间距,以使位于左侧的撑臂32可以向右侧移动,使位于右侧的撑臂32可以向左侧移动,即四个撑臂32可以在水平方向上聚拢与远离;
23.初始操作下,使撑开的传动带前后距离增加以大于要组装的两个带轮的直径,该步骤便于后续带轮的套装,相对的,该传动带当前左右长度相较于套装在两个带轮上后的左右长度短。
24.进一步的,所述臂组件还包括能够固定在撑臂32上的两个杆套41,以及一体连接在杆套41上的凸环42;利用每个杆套41上的上下两个对称设置的凸环42,可以避免传动带偏移,上下方位的凸环42卡在传动带的上下两端。
25.进一步的,所述臂组件还包括设置在撑臂32的键槽33,以及一体连接在杆套41内壁面上且滑动连接在对应键槽33内的键43,以及与凸环42螺纹连接并能够抵在撑臂32上的预紧件44;其中所述预紧件44可以采用螺栓,进而旋松螺栓可以调节两个凸环42的间距,以适应宽度不同的传动带。
26.进一步的,参考图6至7,还包括抓取机构,所述抓取机构包括伸缩机构ⅱ51、连接座52、伸缩机构ⅲ53、基座ⅱ61、电机ⅱ62、双向伸缩机构63、撑指64和橡胶套65;
27.伸缩机构ⅱ51的外壳固接在顶架11上,伸缩机构ⅱ51的活动端朝下设置,连接座52固接在伸缩机构ⅱ51的活动端上,通过伸缩机构ⅲ53的外壳固接在连接座52上,伸缩机构ⅲ53的活动端朝右设置,双向伸缩机构63固接在伸缩机构ⅲ53的活动端,双向伸缩机构63优选采用双向气缸,双向伸缩机构63左侧活动端固接两个撑指64,双向伸缩机构63右侧活动端也固接两个撑指64,四个撑指64靠近时用于夹固带轮或带轮上装配的轴;
28.将电机ⅱ62固接在基座ⅱ61的下端,电机ⅱ62的输出轴固接双向伸缩机构63,进而使四个撑指64转动使四个撑指64夹取的带轮转动,将带轮上的销孔朝向操作人员,便于将销钉插入带轮和轴,以使带轮和轴定位;
29.参看图1和图2,抓取机构是位于前后两个方向上撑托机构之间的,并且撑指64能够升降与左右移动的,升降靠伸缩机构ⅱ51实现,左右移动靠伸缩机构ⅲ53实现;当传动带撑开后,两个抓取机构各抓取一个带轮,抓取两个至传动带内部的左右两侧,随后使两个带轮间距继续增加直至接触传动带,此时带轮位于前后两个方向上的撑臂32之间,使左右两个方向的撑臂32靠近随后升高推出传动带,而两个带轮间距增加的带轮则会成功套装上传动带,此时各个机构均在带轮上方,便于从下方插入轴类机构,最后安装相关的壳体;
30.进一步的,还包括调节顶架11的机械臂,所述机械臂可以根据实际需求采购现有的产品,以便于流水线作业。
31.当不采用机械臂实现定点加工时,也可以采用支撑件,或配合支撑件使用,图8和图9为采用支撑件的示意图,该情况用于支撑顶架11,此时包括支撑柱73,配合使用的方案则取消支撑柱73,使用机械臂支撑顶架11;所述支撑件包括支撑台71、通口72、支撑柱73、支撑板74、支撑杆ⅱ75和托举机构。
32.通口72设置在支撑台71上,支撑板74固接在支撑台71的下侧,支撑板74上固接两个支撑杆ⅱ75;
33.参看图10,所述托举机构包括滑动连接在两个支撑杆ⅱ75上的底座81,以及固接在底座81上的伸缩机构ⅳ82,以及通过伸缩机构ⅳ82驱动实现升降且位于支撑台71上方的托台83,所述伸缩机构ⅳ82穿过通口72;利用托台83托举相关配件,如轴承座、产品外壳,通常该外壳用于轴的安装,带轮则安装在轴上,当带轮较重也可以使撑指64配合可升降的托台83托举带轮,底座81可以左右滑动以对准;上述中伸缩机构ⅰ(24)、伸缩机构ⅱ(51)、伸缩机构ⅲ(53)和伸缩机构ⅳ(82)根据重量需求可以采用电动推杆、电动缸以及液压缸。
技术特征:
1.一种组装机器人,包括顶架(11),以及两个对称设置的撑托机构;其中所述撑托机构包括机架(21),以及转动连接在机架(21)上的两个双向丝杠(22),以及驱动其中一个双向丝杠(22)转动的驱动电机ⅰ(23),以及两个臂组件,所述两个双向丝杠(22)通过传动件同步传动连接;其中所述臂组件包括基座ⅰ(31),以及固接在基座ⅰ(31)下端的撑臂(32);两个基座ⅰ(31)分别螺纹连接在双向丝杠(22)的前后两侧,机架(21)通过顶架(11)支撑。2.根据权利要求1所述的组装机器人,所述撑托机构还包括驱动机架(21)靠近和远离另外一个撑托机构的伸缩机构ⅰ(24);伸缩机构ⅰ(24)安装在顶架(11)上。3.根据权利要求2所述的组装机器人,所述臂组件还包括能够固定在撑臂(32)上的两个杆套(41),以及一体连接在杆套(41)上的凸环(42)。4.根据权利要求3所述的组装机器人,所述臂组件还包括设置在撑臂(32)的键槽(33),以及一体连接在杆套(41)内壁面上且滑动连接在对应键槽(33)内的键(43),以及与凸环(42)螺纹连接并能够抵在撑臂(32)上的预紧件(44)。5.根据权利要求4所述的组装机器人,还包括抓取机构,所述抓取机构包括固接在顶架(11)上的伸缩机构ⅱ(51),以及通过伸缩机构ⅱ(51)驱动实现垂直运动的连接座(52),以及固接在连接座(52)上的伸缩机构ⅲ(53),以及通过伸缩机构ⅲ(53)驱动实现水平运动的基座ⅱ(61),以及安装在基座ⅱ(61)下方的双向伸缩机构(63),以及固接在双向伸缩机构(63)两侧以实现同步靠近或远离的撑指(64)。6.根据权利要求5所述的组装机器人,所述撑指(64)上固接有橡胶套(65)。7.根据权利要求6所述的组装机器人,所述抓取机构还包括固接在基座ⅱ(61)下端的电机ⅱ(62),所述双向伸缩机构(63)通过电机ⅱ(62)驱动实现转动。8.根据权利要求7所述的组装机器人,还包括调节顶架(11)的机械臂。9.根据权利要求7所述的组装机器人,还包括支撑调节顶架(11)的支撑件。10.根据权利要求9所述的组装机器人,所述支撑件包括支撑台(71),以及设置在支撑台(71)上的通口(72),以及固接在支撑台(71)下侧的支撑板(74),以及固接在支撑板(74)上的两个支撑杆ⅱ(75),以及托举机构;所述托举机构包括滑动连接在两个支撑杆ⅱ(75)上的底座(81),以及固接在底座(81)上的伸缩机构ⅳ(82),以及通过伸缩机构ⅳ(82)驱动实现升降且位于支撑台(71)上方的托台(83),所述伸缩机构ⅳ(82)穿过通口(72)。
技术总结
本发明涉及机器人领域,更具体的说是一种组装机器人,包括顶架,以及两个对称设置的撑托机构;其中所述撑托机构包括机架,以及转动连接在机架上的两个双向丝杠,以及驱动其中一个双向丝杠转动的驱动电机Ⅰ,以及两个臂组件,所述两个双向丝杠通过传动件同步传动连接;其中所述臂组件包括基座Ⅰ,以及固接在基座Ⅰ下端的撑臂;两个基座Ⅰ分别螺纹连接在双向丝杠的前后两侧,机架通过顶架支撑。所述撑托机构还包括驱动机架靠近和远离另外一个撑托机构的伸缩机构Ⅰ;伸缩机构Ⅰ安装在顶架上。目的是可以便于装配大型带轮和皮带。以便于装配大型带轮和皮带。以便于装配大型带轮和皮带。
技术研发人员:杨俊
受保护的技术使用者:哈尔滨商业大学
技术研发日:2021.11.12
技术公布日:2022/2/11