1.明涉及轨道机器人领域,特别是环形轨道机器人的位置确定方法及系统。
背景技术:
2.现阶段中,针对于执行巡检工作的智能机器人来说,一般来说分为有轨机器人和无轨机器人两种。顾名思义,有轨机器人也可以称为轨道机器人,是一种依赖既定巡检轨道运行来执行巡检工作的特种机器人。在这类机器人中,根据轨道的布设方式,又可简单分为地轨和吊轨两种。而无轨机器人,通过字面意思也可以获知,其不受限于固定轨道行走,但是其通常需依赖slam (simultaneous localization and mapping)实现定位和地图构建,因此严格来说,无轨机器人技术更为先进但只能部署于地面上,因此,对于发电厂等环境,地轨机器人或无轨机器人,都不能很好地适用。同时,由于巡检用途的轨道机器人,其智能化程度在不停提高,因此,为了方便定位巡检过程中发现的故障位置,越来越多有轨型巡检机器人,要求能够准确定位机器人本体在轨道上的位置。对于这一需求,对于单一方向的直线型轨道或类直线型轨道的轨道机器人来说,目前已存在多种解决方案,例如通过光电类型的传感器来确定机器人在轨位置的技术方案,应该说,尤其对于直线型轨道来说,这种方案切实有效且具备一定的准确性。但是,发明人发现,对于目前也同时存在的一些环形轨道的巡检应用中,该方案由于依赖的原理是轨道端到端的距离固定,而传感器在轨位置也固定,因此可以实现定位,但对于环形轨道来说,这种方案并不能实现。
3.
技术实现要素:
4.鉴于现有技术存在的上述问题,本发明的一个方面的目的是提供一种可针对环形轨道进行精确定位的环形轨道机器人的位置确定方法及系统。
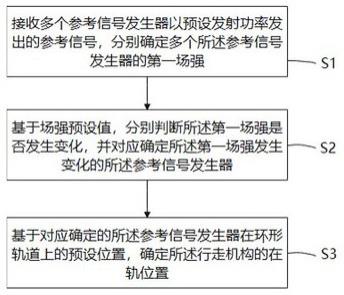
5.为了实现上述目的,本发明一个方面提供的环形轨道机器人的位置确定方法,该轨道机器人部署于环形轨道,所述环形轨道通过多个轨道支架支撑固定,所述行走机构挂载于所述环形轨道上,该方法包括:s1、接收多个参考信号发生器以预设发射功率发出的参考信号,分别确定多个参考信号发生器的第一场强;多个所述参考信号发生发生器依序各自独立地设置在所述环形轨道上;s2、基于场强预设值,分别判断所述第一场强是否发生变化,并对应确定所述第一场强发生变化的所述参考信号发生器;s3、基于对应确定的所述参考信号发生器在环形轨道上的预设位置,确定所述行走机构的在轨位置。
6.作为优选,多个所述参考信号发生器具备相同的预设发射功率,所述行走机构上搭载有定位信号发生器,所述定位信号发生器配置为与所述参考信号发生器发出的信号形成同频干扰。
7.作为优选,在s1步骤中,至少确定两个所述第一场强发生变化的所述参考信号发生器,基于两个所述第一场强与所述场强预设值的差值,确定场强损耗值,基于所述场强损耗值与行走机构的在轨位置之间的对应关系,确定所述行走机构的在轨位置。
8.作为优选,所述行走机构上设置的所述定位信号发生器通过一朝向所述环形轨道的几何中心方向的定向天线定向发送,该方法还包括:记录检测到定位信号的第一时刻;记录已经既定位置的参考信号发生器的场强发生变化的第二时刻;基于行走机构的预设速度及第二时刻与第一时刻的差值,确定行走机构的位置。
9.本发明的另一方面,还提供一种环形轨道机器人的位置确定系统,该系统包括:多个参考信号发生器,其配置为以预设发射功率发出的参考信号,多个所述参考信号发生器,以预设位置设置于所述环形轨道上;接收天线,其配置为接收所述参考信号;控制主机,其配置为分别确定多个参考信号发生器的第一场强;基于场强预设值,分别判断所述第一场强是否发生变化,并对应确定所述第一场强发生变化的所述参考信号发生器;基于对应确定的所述参考信号发生器在环形轨道上的预设位置,确定所述行走机构的在轨位置。
10.作为优选,所述控制主机包括:场强获取单元,分别确定多个参考信号发生器的第一场强;场强分析单元,基于场强预设值,分别判断所述第一场强是否发生变化,并对应确定所述第一场强发生变化的所述参考信号发生器;运算单元,其配置为基于对应确定的所述参考信号发生器在环形轨道上的预设位置,确定所述行走机构的在轨位置。
11.作为优选,多个所述参考信号发生器具备相同的预设发射功率,所述行走机构上搭载有定位信号发生器,所述定位信号发生器配置为与所述参考信号发生器发出的信号形成同频干扰。
12.作为优选,所述场强分析单元还配置为至少确定两个所述第一场强发生变化的所述参考信号发生器;所述运算单元还配置为基于两个所述第一场强与所述场强预设值的差值,确定场强损耗值,基于所述场强损耗值与行走机构的在轨位置之间的对应关系,确定所述行走机构的在轨位置。
13.作为优选,所述行走机构上设置的所述定位信号发生器通过一朝向所述环形轨道的几何中心方向的定向天线定向发送,所述运算单元还配置为:记录检测到定位信号的第一时刻;记录已经既定位置的参考信号发生器的场强发生变化的第二时刻;基于行走机构的预设速度及第二时刻与第一时刻的差值,确定行走机构的位置。
14.本发明提供的环形轨道机器人的位置确定方法及系统,可在环形轨道上以固定位置设置参考信号发生器,而在环形轨道的中心位置设置全向天线用以接收该参考信号。当在行走机构上设置定位信号发生器时,该定位信号由轨道中心的接收天线以定向方式接收,并且由于定位信号发生器和参考信号发生器同频干扰,因此,通过确定信号场强发生变化的时机,结合行走机构的预设行走速度,即可准确确定其在轨位置。
附图说明
15.图1为本发明的环形轨道机器人的位置确定系统的环形轨道的结构示意图。
16.图2为本发明的环形轨道机器人的位置确定方法的原理示意图。
17.图3为本发明的环形轨道机器人的位置确定系统的系统框图。
18.图4为本发明的环形轨道机器人的位置确定方法的流程图。
具体实施方式
19.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
20.此处参考附图描述本发明的各种方案以及特征。
21.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
22.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
23.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
24.如图4所示,本发明一个方面提供的环形轨道机器人的位置确定方法,该轨道机器人部署于环形轨道,所述环形轨道通过多个轨道支架支撑固定,所述行走机构挂载于所述环形轨道上,该方法包括:s1、接收多个参考信号发生器以预设发射功率发出的参考信号,分别确定多个参考信号发生器的第一场强;多个所述参考信号发生发生器依序各自独立地设置在所述环形轨道上;优选地,多个所述参考信号发生器具备相同的预设发射功率,所述行走机构上搭载有定位信号发生器,所述定位信号发生器配置为与所述参考信号发生器发出的信号形成同频干扰。
25.s2、基于场强预设值,分别判断所述第一场强是否发生变化,并对应确定所述第一场强发生变化的所述参考信号发生器;s3、基于对应确定的所述参考信号发生器在环形轨道上的预设位置,确定所述行走机构的在轨位置。
26.另外,在s1步骤中,至少确定两个所述第一场强发生变化的所述参考信号发生器,基于两个所述第一场强与所述场强预设值的差值,确定场强损耗值,基于所述场强损耗值与行走机构的在轨位置之间的对应关系,确定所述行走机构的在轨位置。
27.在一些实施例中,如图2所示,所述行走机构上设置的所述定位信号发生器通过一朝向所述环形轨道的几何中心方向的定向天线定向发送,该方法还包括:记录检测到定位信号的第一时刻;记录已经既定位置的参考信号发生器的场强发生变化的第二时刻;基于行走机构的预设速度及第二时刻与第一时刻的差值,确定行走机构的位置。如图所示,在行走机构当前位于c点时,且已知由a点向b点移动时,可记录a点对应的参考信号发生器场强发生变化的第一时刻,而后再记录位于中心的接收天线的定向天线所接收的行为信号的第二时刻,再结合行走机构的移动速率,以及a点和b点之间的预设间距,即可确定行走机构的
确切位置。
28.图1和图3示出了本发明另一方面还提供的一种环形轨道机器人的位置确定系统,该系统包括:参考信号发生器400,其设置有多个,图3中示出分别为参考信号发生器401、参考信号发生器402、参考信号发生器403、参考信号发生器404、参考信号发生器405、参考信号发生器406、参考信号发生器407和参考信号发生器408,其配置为以预设发射功率发出的参考信号,多个所述参考信号发生器400,以预设位置设置于所述环形轨道上;接收天线300,其配置为接收所述参考信号;具体地,该接收天线包括接收参考信号的全向天线和接收定位信号的定向天线。
29.控制主机,其配置为分别确定多个参考信号发生器的第一场强;基于场强预设值,分别判断所述第一场强是否发生变化,并对应确定所述第一场强发生变化的所述参考信号发生器;基于对应确定的所述参考信号发生器在环形轨道上的预设位置,确定所述行走机构的在轨位置。
30.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。