1.本技术属于航空货运技术领域,尤其涉及用于民用飞机集装式货运系统自动升降的多向锁定装置。
背景技术:
2.锁定装置为民用飞机集装式货运系统配套,通常安装于标准地板滑轨内或传输滚棒安装架内,用于民用集装单元空运过程中对航向、垂向或逆航向、垂向的可靠限动,合理的限动机构设计,可确保集装单元在货运系统要求的位置精确锁定,将集装单元产生的各类载荷通过双向锁定装置传递至飞机主承载框梁。
3.相关技术中,民机集装式货运系统配套的锁定装置通过非联动杆系机构设计技术、三角函数的载荷平衡与传递设计技术,仅可同时实现航向与垂向或逆航向与垂向锁定功能。采用这种技术,受限于工作原理,当锁定装置安装于系统侧向时,仅可承受侧向与垂向载荷,无法承载航向载荷。此外,在锁定状态,锁定装置外廓在集装单元底板结构作用下无法自动降至传输平面以下,需要手动解锁后方能解除对集装单元的限位。
4.上述方案无法满足货运系统对锁定装置外廓自动降至传输平面以下,单件锁定装置同时具备航向、垂向及侧向限动功能的需求。
技术实现要素:
5.为了解决相关技术中的问题,本发明提供用于民用飞机集装式货运系统自动升降的多向锁定装置,所述技术方案如下:
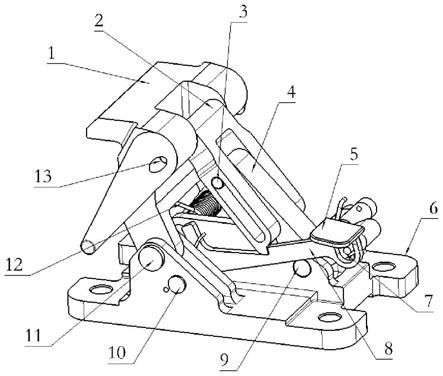
6.一种用于民用飞机集装式货运系统自动升降的多向锁定装置,包括:锁定锁舌1、底座6、联动杆2、限位转臂4和解锁转臂8,锁定锁舌1与联动杆2、限位转臂4和底座6构成4杆联动,
7.其中,锁定锁舌1位于底座6左侧,锁定锁舌1与底座6铰接,锁定锁舌1设有u型凹槽,可将锁定锁舌1处扭簧转臂实现嵌入式安装,同时,u型凹槽结构可将扭簧转矩传递至锁定锁舌1,使锁定锁舌1具有解锁运动趋势的转矩;
8.联动杆2为u型结构,联动杆2位于锁定锁舌1中间,联动杆2两端分别与锁定锁舌1铰接;
9.联动杆2的两侧设有长圆孔滑槽,限位转臂4位于联动杆2中间,限位转臂4分别与底座6和联动杆2铰接,限位转臂4可在联动杆2上的长圆孔滑槽中移动;
10.解锁转臂8位于联动杆2左侧,解锁转臂8中间位置设有锐角凹槽,末端位置设有长圆孔,锐角凹槽结构与联动杆2凸台接触,长圆孔用于为解锁转臂8的锐角凹槽脱离联动杆2的结构限位提供空行程。
11.其中,锁定锁舌1具有4个限位面,4个限位面包括:航向限位面14、逆航向限位面17、垂向限位面15和侧向限位面16,其中,垂向限位面15位于锁舌上方,航向限位面14与逆航向限位面17位于垂向限位面15两侧,侧向限位面16与垂向限位面15垂直,不同位置限位
面用于承受来自集装单元不同方向传递的外载荷。
12.其中,锁定锁舌1对称设有3处导向面,其中,两处导向面为圆锥面,两处圆锥导向面位于锁定锁舌1顶部两侧,圆锥导向面向锁定锁舌1外侧延伸,最大外廓不超过锁定锁舌1的侧向限位面16,另外1处导向面为平滑圆角导向面,位于锁定锁舌1顶部,且位于两处圆锥导向面之间。
13.其中,所述装置还包括第一销轴9、第二销轴10、第三销轴11、第四销轴13、第五销轴3和第六销轴7,
14.其中,第一销轴9、第二销轴10及第三销轴11均与底座6连接,用于传递各机构载荷,同时为相应机构提供旋转中心,
15.锁定锁舌1和联动杆2通过第四销轴13铰接,联动杆2和限位转臂4通过第五销轴3铰接,限位转臂4和解锁转臂8通过第六销轴7铰接。
16.其中,所述锁定装置在锁定状态下,当锁定锁舌1对集装单元进行航向限动时,载荷作用于锁定锁舌1的航向限位面14或逆航向限位面17;对集装单元垂向、侧向限动时,载荷作用于垂向限位面15与侧向限位面16,
17.锁定锁舌1承载后将载荷通过第四销轴13、第五销轴3、联动杆2、限位转臂4、第一销轴9逐级传递,最终将外载荷传递至底座6,通过底座6传递至飞机框梁结构,对集装单元多个方向的限位,
18.在锁定状态,锁定锁舌1、联动杆2、限位转臂4与底座6构成稳定的三角载荷传递路径。
19.其中,解锁时,按压解锁转臂8,解锁转臂8受压后绕第二销轴10顺时针旋转,直至解除解锁转臂8上的限位凹槽18对联动杆2的限位,解除限位后解锁转臂8持续顺时针旋转,通过第六销轴7使限位转臂4绕第一销轴9顺时针旋转,限位转臂4转动过程中通过第五销轴3、第四销轴13使联动杆2拉动锁定锁舌1绕第三销轴11顺时针旋转,直至锁定锁舌1限位面解除对集装单元锁槽的限位,锁定锁舌1在复位扭簧作用下保持解锁状态。
20.其中,上锁时,推锁定锁舌1,使锁定锁舌1绕第三销轴11逆时针旋转,同时克服锁定锁舌1上顺时针的弹簧扭矩,锁定锁舌1在旋转过程中,通过第四销轴13驱动联动杆2,使联动杆2通过第五销轴3驱动限位转臂4逆时针旋转,直至锁定锁舌1达到锁定状态,同时,联动杆2凹槽与解锁转臂8达到锁定位置,解锁转臂8在弹簧扭矩的作用下绕第二销轴10达到锁定状态。
21.其中,需要自动降下时,控制集装单元向左移动,集装单元底板结构20与锁定锁舌1接触,锁定锁舌1的两处圆锥导向面使锁定锁舌1在承受集装单元底板结构20外载荷后,锁定锁舌1绕第三销轴11逆时针旋转,并通过第四销轴13带动联动杆2转动,同时联动杆2上的滑槽使第五销轴3驱动解锁转臂8绕转轴逆时针旋转,直至锁定锁舌1外廓降至传输平面以下,
22.当集装单元完全通过锁定锁舌1后,锁定锁舌1在弹簧作用下,自动恢复至锁定状态。
23.本发明提供的用于民用飞机集装式货运系统自动升降的多向锁定装置,可完善货运专业核心类部件的技术谱系,填补货运专业限动类装置自动降下与复位、多向(航向、侧向、垂向)可靠锁定及防止非预期解锁等设计技术空白,增加技术壁垒,提升专业竞争力;采
用了功能模块化与集成化设计,将解锁、上锁、自动降下及复位、多向可靠锁定等功能集成化设计,大幅提升了部件的功重比,可降低系统配套部件种类及数量,增加系统装载集装单元的种类及数量。
附图说明
24.图1为本技术实施例提供的多向锁定装置锁定状态示意图;
25.图2为本技术实施例提供的多向锁定装置锁定锁舌限位面示意图;
26.图3为本技术实施例提供的多向锁定装置解锁初始状态示意图;
27.图4为本技术实施例提供的多向锁定装置解锁状态示意图;
28.图5为本技术实施例提供的多向锁定装置上锁状态示意图;
29.图6为本技术实施例提供的多向锁定装置自动降下初始状态示意图;
30.图7为本技术实施例提供的多向锁定装置自动降下状态示意图;
31.图8为本技术实施例提供的多向锁定装置自动降下状态结束示意图。
具体实施方式
32.下面通过具体的实施方式和附图对本技术作进一步详细说明。
33.本发明提供的用于民用飞机集装式货运系统自动升降的多向锁定装置,包括:锁定锁舌1、底座6、联动杆2、限位转臂4和解锁转臂8,
34.其中,锁定锁舌1位于底座6左侧,锁定锁舌1与底座6通过铰链连接。联动杆2位于锁定锁舌1中间,联动杆2两端分别与锁定锁舌1铰链连接。
35.本发明中,锁定锁舌1具有4个限位面,其中,垂向限位面15位于锁舌上方,航向限位面14与逆航向限位面17位于垂向限位面15两侧,侧向限位面16与垂向限位面15垂直,不同位置限位面用于承受来自集装单元不同方向传递的外载荷。
36.锁定锁舌1对称设有3处导向面,其中,两处导向面为圆锥面,这两处圆锥导向面位于锁定锁舌1顶部两侧,圆锥导向面向锁定锁舌1外侧延伸,其最大外廓不超过锁定锁舌1的侧向限位面16。另外1处导向面为平滑圆角导向面,位于锁定锁舌1顶部,且位于两处圆锥导向面之间。集装单元底板结构通过本锁定装置时,首先会接触圆锥导向面,圆锥导向面在集装单元挤压下降低锁定锁舌1高度至传输平面以下,随后集装单元底板结构会接触锁定锁舌1中间位置的平滑圆角导向面。
37.两处圆锥导向面的设计可满足集装单元进舱或出舱过程中,锁定锁舌1在逆时针旋转降下过程中与集装单元底板的滑动摩擦阻力持续性保持最小值。
38.两处圆锥导向面可满足集装单元进舱或出舱过程中,圆锥导向面在集装单元作用下快速逆时针旋转下降,直至集装单元完全处于锁定锁舌1上方,集装单元完全通过后,本锁定装置可快速复位至锁定状态。
39.联动杆2为u型结构,在锁定状态下,该u型结构可将联动杆2承受的大载荷传递至底座6的螺栓孔,确保联动杆2在解锁状态位于航空货运系统传输平面以下。关于航空货运系统传输平面可以参考相关技术,在此不再赘述。
40.本锁定装置中第一销轴9、第二销轴10及第三销轴11均与底座6连接,用于传递各机构载荷,同时为相应机构提供旋转中心。第四销轴13、第五销轴3、第六销轴7实现不同机
构间的铰接连接,传递运动。
41.限位转臂4位于联动杆2中间,联动杆2的两侧设有长圆孔滑槽,联动杆2与限位转臂4通过叉耳结构铰链连接,限位转臂4上固定连接的第五销轴3可在联动杆2上的长圆孔滑槽中移动,为本锁定装置提供合理的运动自由度。本锁定装置在降下过程中,该长圆孔滑槽为限位转臂4、锁定锁舌1提供充足的运动空间,同时确保联动杆2在降下状态位于传输平面以下。
42.限位转臂4通过转轴与底座6铰链连接,通过设置第一销轴9,可将相应弹簧的扭矩传递至限位转臂4,使限位转臂4具有解锁运动趋势的转矩。
43.锁定锁舌1设有u型凹槽,可将锁定锁舌1处扭簧转臂实现嵌入式安装,避免扭簧转矩在侧向限位面凸起,同时,该u型凹槽结构可将扭簧转矩传递至锁定锁舌1,使锁定锁舌1具有解锁运动趋势的转矩。
44.锁定锁舌1与联动杆2、限位转臂4和底座6构成4杆联动,合理的铰链与位移设计,确保锁定锁舌到达解锁状态后,锁定锁舌1不会占用太多空间。
45.通过合理设计锁定锁舌1、联动杆2、限位转臂4和底座6的位置关系,确保锁定锁舌1下降至传输平面以下之前,联动杆2和限位转臂4已下降至传输平面下。
46.解锁转臂8位于联动杆2左侧。解锁转臂8中间位置设有锐角凹槽,末端位置设有长圆孔,其中,锐角凹槽结构与联动杆2凸台接触,确保解锁转臂8的锐角凹槽在解除对联动杆2机械限位后,可使限位转臂4继续带动联动杆2逆时针旋转,使联动杆2带动锁定锁舌1往解锁方向运动,直至锁定锁舌1完全处于解锁位置;解锁转臂8末端位置的长圆孔设计用于为解锁转臂8的锐角凹槽脱离联动杆2的结构限位提供空行程,该行程非常关键,可避免解锁转臂8解锁过程中出现机构卡滞,解锁转臂8末端位置的长圆孔设计用于确保锁定状态下解锁转臂8与限位转臂4上固连的第六销轴7存在合理间隙,避免解锁转臂8直接承受来自锁定锁舌1的大载荷,避免解锁转臂8变形,造成解锁卡滞。
47.解锁转臂8的旋转中心附件集成设有矩形凸台,该矩形凸台可与本锁定装置的第三销轴11外表面接触,确保解锁转臂8在锁定状态对解锁转臂8的空间位置进行限位,使解锁转臂8可靠保持在该位置。
48.解锁转臂8的旋转中心附件还集成设有通孔,该通孔的位置可降低扭簧转臂的长度,同时为解锁转臂8处扭簧转臂提供可靠安装面,确保该扭簧转臂可为解锁转臂8始终提供逆时针方向转矩。
49.另外,本锁定装置经手动快卸模块接口设计改进,还可与货运系统其它部件快速集成,大幅提升了该装置的使用范围。
50.本技术提供的用于民用飞机集装式货运系统自动升降的多向锁定装置,具备限动功能、解锁功能、上锁功能和自动降下功能。下面将结合图1至图8对各功能的操作进行详细说明。
51.请参见图1和图2,本锁定装置的限动功能的操作如下:
52.本锁定装置在锁定状态,通过锁定锁舌1、联动杆2、限位转臂4与底座6间的特殊构型设计,能够对大规格集装单元实现航向、逆航向及垂向限位。
53.当锁定锁舌1对集装单元进行航向限动时,载荷作用于锁定锁舌1的航向限位面14或逆航向限位面17;对集装单元垂向、侧向限动时,载荷作用于垂向限位面15与侧向限位面
16。
54.锁定锁舌1承载后将载荷通过第四销轴13、第五销轴3、联动杆2、限位转臂4、第一销轴9逐级传递,最终将外载荷传递至底座6,通过底座6传递至飞机框梁结构,实现对集装单元多个方向的限位。
55.在锁定状态,锁定锁舌1、联动杆2、限位转臂4与底座6构成稳定的三角载荷传递路径。
56.图1中的12为扭簧,其为锁定锁舌1提供顺时针转矩,安装在第三销轴11上。
57.请参见图3和图4,本锁定装置的解锁功能的操作如下:
58.解锁时,手动按压解锁转臂8,按压位置5如图3所示,解锁转臂8受压后绕第二销轴10顺时针旋转,直至解除解锁转臂8上的限位凹槽18对联动杆2限位,解除限位后解锁转臂8持续顺时针旋转,通过第六销轴7使限位转臂4绕第一销轴9顺时针旋转,限位转臂4转动过程中通过第五销轴3、第四销轴13使联动杆2拉动锁定锁舌1绕第三销轴11顺时针旋转,直至锁定锁舌1限位面解除对集装单元锁槽的限位,锁定锁舌1在复位扭簧作用下可靠保持解锁状态。
59.请参见图5,本锁定装置的上锁功能的操作如下:
60.上锁时,沿图5中f所指示方向推锁定锁舌1,使锁定锁舌1绕第三销轴11逆时针旋转,同时克服锁定锁舌1上顺时针的弹簧扭矩,锁定锁舌1在旋转过程中,通过第四销轴13驱动联动杆2,使联动杆2通过第五销轴3驱动限位转臂4逆时针旋转,直至锁定锁舌1达到锁定状态,与此同时,联动杆2凹槽与解锁转臂8达到锁定位置,解锁转臂8在相应弹簧扭矩的作用下绕第二销轴10达到锁定状态。
61.请参见图6至图8,本锁定装置的自动降下功能的操作如下:
62.本锁定装置需要自动降下时,集装单元向左移动,集装单元底板结构20与锁定锁舌1接触,结构19(即两处圆锥导向面)的设计使锁定锁舌1在承受集装单元底板结构20外载荷后,锁定锁舌1绕第三销轴11逆时针旋转,并通过第四销轴13带动联动杆2转动,同时联动杆2上的滑槽使第五销轴3驱动解锁转臂8绕相应转轴逆时针旋转,直至锁定锁舌1外廓降至传输平面以下,使集装单元在无需操作人员手动解锁的情况下顺利通过锁定装置。当集装单元完全通过锁定锁舌1后,锁定锁舌1在其弹簧作用下,自动恢复至锁定状态。
63.本技术提供的锁定装置的有益效果至少包括以下几个方面:
64.a)本锁定装置可完善货运专业核心类部件的技术谱系,填补公司货运专业限动类装置自动降下与复位、多向(航向、侧向、垂向)可靠锁定及防止非预期解锁等设计技术空白,增加技术壁垒,提升专业竞争力;
65.b)本锁定装置采用了功能模块化与集成化设计,将解锁、上锁、自动降下及复位、多向可靠锁定等功能集成化设计,大幅提升了部件的功重比,可降低系统配套部件种类及数量,增加系统装载集装单元的种类及数量。
66.c)本锁定装置经过适应性更改,可用于宽体民用客机、客改货飞机或宽体民用货机;
67.d)本锁定装置经过适应性改进,可实现与民机集装式货运系统其他部件的快速可拆卸集成,使系统核心部件具备多项拓展功能;
68.e)本锁定装置经过适应性改进,也可在军用运输机的货运系统中配套使用,降低
公司在货运专业核心部件研发的综合成本。
69.针对在民用飞机集装式货运系统对自动升降的多向锁定装置需求,本锁定装置采用集成与嵌入式设计思路,其各项功能通过杆系机构大载荷下的平衡构型设计、基于低摩擦阻力的锁舌锥面优化集成设计、基于多自由度杆系机构自动降下的滑槽参数匹配优化设计、振动环境下余度可靠锁定等技术,实现较同类装置具有结构紧凑、自动降下及复位、多向(包括航向、侧向、垂向)承载、余度可靠解锁等优点,解决了现有同类锁定装置无法同时实现对集装单元航向、侧向及垂向的限位,以及在集装单元底部结构接触下锁定装置外廓无法自动降至传输平面以下的问题。
70.本技术中的锁定装置可有效提升民用集装式货运系统不同种类集装单元的装载范围,降低了系统配套锁定装置的种类,进一步提升系统安全性。
71.以上仅表达了本技术的实施方式,其描述较为具体和详细,但且不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。