1.本发明涉及物件搬运领域,尤其涉及一种多指协同式末端搬运执行器。
背景技术:
2.在工业设备生产的过程中,产品的夹持搬运是其重要环节,其作业质量的好坏直接关系到生产的速度和效率,从而最终影响市场价格和经济效益。在传统物流作业模式中,人力搬运耗时较长,人员工作强度较大,同时人员分拣效率相对较低、错误率相对较高,不能满足电子物流作业多品类、大批量的特征。
3.我国对生产物流的统计,机械工厂每生产1吨成品,需进行252吨次的装卸搬运,其成本为加工成本的15.5%。生产注定伴随着物料搬运,物料搬运重量常常是产品重量的数倍,甚至数十倍。在美国,装卸搬运费用占总成本的20—30%;德国企业物料搬运费占营业额的1/3;日本物料搬运费占gdp的10.73%。在我国,铁路运输的始发地和目的地装卸作业费大致占运费的20%左右,船运占40%左右。
4.目前大多数搬运采用人工搬运,劳动强度大、消耗时间长,且具有一定的危险性。这种工作方式的搬运效率很低,并且搬运工人也不愿意在工厂进行简单的机械的重复性劳动。另一方面,现在的仓库中货物大部分是体积大、重量大、表面脏,仓库的工作环境较差,不利于人们工作,如在工厂的生产车间中许多的零件上面沾满了油污,有的零件上面还存留一些毛刺,不利于人工搬运。同时,仓库中货物摆放也需要消耗相当的一部分人力,效率不高。这些存在的问题进一步推动工业机器人的引入与发展,采用固定式机械臂协助生产,传统机械臂搬运结构大多采用恒力机构,不考虑所搬运物件的性质,容易损坏物件。降低企业效益。
技术实现要素:
5.针对上述问题,本发明提供一种多指协同式末端搬运执行器,提供一种减轻了工人的劳动强度,提高了搬运效率,对物体适应性更好,以及更轻巧的末端执行器。
6.为实现上述目的,本发明提供如下技术方案:一种多指协同式末端搬运执行器,其特征在于:包括连接板、安装板、灵巧手机构;连接板的底部两端各设有一个安装板,一个灵巧手机构设置于一块安装板上,两个灵巧手机构抓取方向相对设置;灵巧手机构包括伺服电机、减速器、减速器联轴器、推杆、多个灵巧手指、底座和长杆;安装板沿长度方向设置多个底座,长杆穿过多个底座,长杆可相对于底座转动,每个底座上对应一个灵巧手指;伺服电机输出轴与减速器相连,减速器伸出轴通过减速器联轴器与长杆相连;长杆带动安装板上多个灵巧手指同步活动;灵巧手指包括灵巧手驱动轴、第一指节、第二指节、第三指节、第二销轴、第三销轴、推杆、第一指节驱动轴和第二指节驱动轴;第一指节一端通过第一销轴与安装板连接,另一端通过第二销轴与第二指节连接,第二指节另一端通过第三销轴与第三指节连接;灵巧手驱动轴一端与长杆固定连接,另一端与推杆活动连接,推杆另一端与第一指节活动连接;第一指节上开设有两个限位
槽,第一指节驱动轴两端通过销轴限位于限位槽内;第二指节上靠近第三指节处开设有一个限位槽,第二指节驱动轴一端通过销轴与第一指节上靠近第二指节的一端活动连接,第二指节驱动轴另一端通过销轴限位于第二指节的限位槽内;推杆带动第一指节、第二指节和第三指节转动,从而夹持物体。
7.作为本发明进一步优选,还包括吸盘机构;所述吸盘机构包括:铝型材、角铝和海绵吸具接头;铝型材连接于连接板底部,两个角铝连接于铝型材两侧,海绵吸具接头连接于铝型材和角铝下方。
8.作为本发明进一步优选,所述吸盘机构还包括海绵;海绵上开设有对应孔,海绵吸具接头穿过对应孔。
9.作为本发明进一步优选,铝型材的中间位置设置有应变片。
10.作为本发明进一步优选,所述减速器为五级行星减速器。
11.作为本发明进一步优选,所述吸盘机构还包括三位四通阀;三位四通阀与海绵吸具接头连接。
12.作为本发明进一步优选,连接板顶部中间设置有安装法兰。
13.作为本发明进一步优选,还包括螺母座、电机连接机构和连接法兰;电机连接机构包括:电机固定座、电机、联轴器、两根丝杆和两组支撑座;连接板两端底部分别设置一个电机固定座,电机固定座上固定设置一个电机;支撑座一组为两个,一根丝杆对应一组支撑座,两根丝杆处于同一直线,安装板与丝杆垂直,螺母座设置在丝杆上,电机的伸出轴与联轴器一端相连,联轴器另一端连接丝杆,螺母座与丝杆螺旋连接;连接法兰通过螺栓连接于螺母座下方;安装板连接于连接法兰底部,一根丝杆的两端通过一组支撑座连接在连接板底部。
14.有益效果:1.采用机械代替人工搬运,大大减少了人工成本,并且进一步提高了安全性。
15.2.采用机械代替人工搬运,不仅减轻了人们的劳动强度,还提高了作业效率。
16.3.还设置了吸盘机构,对大质量物体进行吸附,减少灵巧手机构的损伤。
17.4.所述多指协同式末端搬运执行器与传统的末端执行器结构相比,质量轻、能够更好适用物体的形状,更好的适用于不同工况。
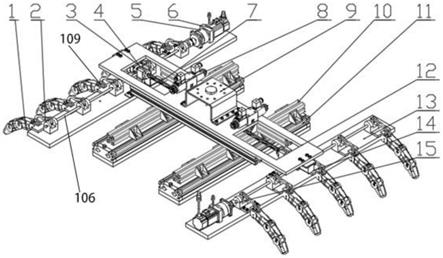
18.附图说明:图1是本发明的整体结构示意图。
19.图2是本发明新型的整体结构的正视图。
20.图3是本发明新型的灵巧手示意图图4是本发明新型的灵巧手内部结构示意图图中:1-灵巧手机构、2-推杆、3-螺母座、4-支撑座、5-减速器、6-伺服电机、7-丝杆、8-三位四通阀、9-安装法兰、10-铝型材、11-吸盘机构、12-连接板、13-安装板、14-电机、15-减速器联轴器、16-电机固定座、17-联轴器、18-连接法兰、19-海绵、20-角铝、21-海绵吸具接头、101-第三指节、102-第三销轴、103-第二指节、104-第二销轴、105-第一指节、106-长杆、107-灵巧手驱动轴、108-底座、109-灵巧手指、110-第一销轴、111-第一指节驱动轴、112-第二指节驱动轴、113-限位槽。
21.具体实施方式:
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
22.本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
23.如图1-4所示,一种多指协同式末端搬运执行器,包括连接板12、安装板13、灵巧手机构1;连接板12的底部两端各设有一个安装板13,一个灵巧手机构1设置于一块安装板13上,两个灵巧手机构1抓取方向相对设置。灵巧手机构1包括伺服电机6、减速器5、减速器联轴器15、推杆2、多个灵巧手指109、底座108和长杆106;安装板13沿长度方向设置多个底座108,长杆106穿过多个底座108,长杆106可相对于底座108转动,每个底座108上对应一个灵巧手指109;伺服电机6输出轴与减速器5相连,减速器5伸出轴通过减速器联轴器15与长杆106相连;长杆106带动安装板13上多个灵巧手指109同步活动。
24.灵巧手指109包括灵巧手驱动轴107、第一指节105、第二指节103、第三指节101、第二销轴104、第三销轴102、推杆2、第一指节驱动轴111和第二指节驱动轴112;第一指节105一端通过第一销轴110与安装板13连接,另一端通过第二销轴104与第二指节103连接,第二指节103另一端通过第三销轴102与第三指节101连接。
25.灵巧手驱动轴107一端与长杆106固定连接,另一端与推杆2活动连接,推杆2另一端与第一指节1活动连接;第一指节105上开设有两个限位槽113,第一指节驱动轴111两端通过销轴限位于限位槽113内;第二指节103上靠近第三指节101处开设有一个限位槽113,第二指节驱动轴112一端通过销轴与第一指节105上靠近第二指节103的一端活动连接,第二指节驱动轴112另一端通过销轴限位于第二指节103的限位槽113内;推杆2带动第一指节105、第二指节103和第三指节101转动,从而夹持物体。
26.如图4所示,当灵巧手指109成直线且为水平状态时,三个限位槽113均为四分之一圆弧形,第一指节105与安装板13铰接处的左下方设有一个限位槽113,第一指节105与第二指节103的连接处上方设有一个限位槽113,第二指节驱动轴112与第一指节105的连接处位于第一指节105与第二指节103连接处的下方。第三指节101的限位槽113位于第三指节101与第二指节103的连接处上方。
27.灵巧手的工作原理为:伺服电机6转动减速器5转动进而带动灵巧手驱动轴107转动。灵巧手驱动轴107,底座108,推杆2,第一指节105构成一个摇杆机构,灵巧手驱动轴107为原动件;推杆为传动件;第一指节105为从动件;第一指节做摆动动作,第一指节105,底座108,第一指节驱动轴111,第二指节103构成一个耦合四连杆机构。第一指节105为原动件,第一指节驱动轴111为传动件,第二指节103为从动件。第一指节驱动轴111通过销轴连接在限位槽103内,第一指节驱动轴111可在限位槽113中滑动。限位槽113的形状可决定第二指节103转动角度。同理,第二指节103,第二指节驱动轴112,第三指节101,第一指节105末端构成一个耦合四连杆机构。在该机构中,第一指节105可视为机架。第二指节103为原动件,第二指节驱动轴112为传动件,第三指节101为从动件。其中,第二指节驱动轴112也通过销轴连接,安装在限位槽113之中。在限位槽113中滑动。
28.还包括吸盘机构11;所述吸盘机构包括:铝型材10、角铝20和海绵吸具接头21;铝
型材10连接于连接板12底部,两个角铝20连接于铝型材10两侧,海绵吸具接头21连接于铝型材10和角铝20下方。吸盘机构11可吸附起质量较大的物件,减少灵巧手机构1的磨损程度,并且在所要吸附物体与其他物件紧密接触时,利用海绵吸具接头21使所需夹持物件与其他物件产生空隙,在轴向上为多指夹持实现定位。。所述吸盘机构还包括海绵19;海绵19上开设有对应孔,海绵吸具接头21穿过对应孔。在对物体吸附时,海绵19可缓存吸力带来的冲击,保护物体不受损坏。同时起到一定的密封作用,以防吸具漏气。
29.铝型材10的中间位置设置有应变片。在吸附物体时,铝型材10产生微小形变,根据铝型材10的形变可计算所吸附物体的质量。伺服电机6可根据质量精准控制力的输出,提高利用率。
30.所述减速器5为五级行星减速器。能更好的控制转速。所述吸盘机构11还包括三位四通阀8;三位四通阀8与海绵吸具接头21连接。通过三位四通阀8对海绵吸具接头21的吸附力进行精准的控制。把工件从底座上吸附起来。
31.多指协同搬运机构工作原理:该机构通过安装法兰9安装在机械臂末端。机械臂将执行器送到工位上,通过三位四通阀8控制吸盘工作,吸附起工件。伺服电机6带动丝杆7转动,丝杆7配合使螺母座3作往复运动,螺母座3的往复运动将灵巧手机构1送至工件两边。伺服电机6驱动灵巧手指109运动,夹持住工件。从而实现对工件的精准力夹持。
32.还包括螺母座3、电机连接机构和连接法兰18;电机连接机构包括:电机固定座16、电机14、联轴器17、两根丝杆7和两组支撑座4;连接板12两端底部分别设置一个电机固定座16,电机固定座16上固定设置一个电机14;支撑座4一组为两个,一根丝杆7对应一组支撑座4,两根丝杆7处于同一直线,安装板13与丝杆7垂直,螺母座3设置在丝杆7上,电机14的伸出轴与联轴器17一端相连,联轴器17另一端连接丝杆7,螺母座3与丝杆7螺旋连接;连接法兰18通过螺栓连接于螺母座3下方;安装板13连接于连接法兰18底部,一根丝杆7的两端通过一组支撑座4连接在连接板12底部。双电机14驱动两丝杆7转动,丝杆7带动螺母座3和连接法兰18横向运动,带动安装板13进行横向运动,实现灵巧手机构1的横向定位,可在横向上适应不同被抓取物体的尺寸。连接板12顶部中间设置有安装法兰9。
33.以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。