1.本实用新型涉及机器人技术领域,具体而言,涉及一种示教器和机器人。
背景技术:
2.示教器作为机器人的操作控制器广泛的应用于工业现场。相关技术中,示教器是一个整体结构,且示教器和机器人控制器需通过线缆连接,但在实际操作过程中,线缆拖动难度较大,且容易缠绕或挂到设备或者人员,从而造成事故。并且带线缆的示教器和控制器一对一连接,导致每台机器人均需要配置一个示教器,增加了成本。
3.因此,如何设计出一种可攻克上述技术缺陷的示教器成为了目前亟待解决的技术问题。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。
5.为此,本实用新型第一方面提出了一种示教器。
6.本实用新型第二方面提出了一种机器人。
7.有鉴于此,本实用新型第一方面提供了一种示教器,用于机器人,示教器包括:本体;无线通信组件,设于本体上,用于连接终端和机器人,以通过终端控制机器人动作;按键,设于本体上,用于通过无线通信组件控制机器人启停;装夹组件,设于本体上,用于装夹终端。
8.在本实用新型所限定的示教器中,示教器包括本体和无线通信组件。本体为示教器的主体框架结构,用于定位和支撑示教器上的其他结构。无线通信组件为示教器上的信息传输装置,无线通信组件可以在终端和机器人之间建立无线通信连接。具体地,无线通信组件可与终端建立第一无线通信连接,终端是用于编写机器人程序的设备,用户可以在终端上通过机器人编程软件编写出可用于控制机器人执行预定动作的动作信息,用户还可以通过操作终端上的实体摇杆或虚拟摇杆生成对应于用户操作的动作信息,以通过该动作信息实现机器人的精准控制。无线通信组件还可与机器人建立第二无线通信连接,在无线通信组件通过第一无线通信连接由终端获取到动作信息后,可将该动作信息通过第二无线通信连接发送至机器人上,以实现终端对机器人的远程控制。
9.对此,本技术通过设置可与机器人建立第二无线通信连接的无线通信组件,免去了示教器和机器人之间的线缆结构,使示教器可以远程控制机器人执行预定动作。一方面解决了相关技术中所存在的示教器和机器人之间的线缆结构拖动难度大,易缠绕或剐蹭用户以及其他设备的技术问题,使用户可以在地面环境和空间环境较为复杂的场景中控制机器人工作并自由移动。另一方面,免去示教器和机器人之间的线缆使用户可以通过本技术所限定的示教器上的无线通信组件和多台机器人中的任意一台机器人建立第二无线通信连接并完成控制。以及在用户需要控制其他机器人时可断开当前第二无线通信连接并与其他机器人建立第二无线通信连接以转而控制其他机器人。从而实现了示教器和多个机器人
的适配和控制,解决了每台机器人均需要配置一个专用示教器,成本较高的技术问题。进而实现优化示教器结构,为用户提供便利条件,降低事故发生概率,缩减用户采购成本的技术效果。
10.通过设置可与终端建立第一无线通信连接的无线通信组件,使用户可以在需要控制机器人动作时临时将终端与无线通信组件远程连接,以完成机器人的远程控制,在不需要控制机器人动作时断开第一无线通信连接并使用该终端执行其他工作。例如,用户可以在需要控制机器人动作时将平板电脑与无线通讯组件相连接,从而通过无线通讯组件将平板电脑上所编写的动作信息发送至机器人上,以控制机器人动作。在完成该机器人的控制后,用户断开平板电脑和无线通信组件间的连接,使用户可以通过该平板电脑完成其他非机器人设备的控制或执行娱乐活动。从而免去了终端和本体之间的实体连接结构,并将终端从示教器的必备结构中剔除。进而实现了优化示教器结构,降低示教器成本,为用户提供便利条件的技术效果。
11.在此基础上,示教器上还设置有按键和装夹组件。按键设置在本体上,用户可以通过操作按键来控制机器人的启停。具体用户可以通过操作按键使无线通信组件向机器人发送停机指令,从而暂停机器人的动作,对应地,用户还可以通过操作按键使无线通信组件向机器人发送启动指令,以使停机状态下的机器人启动并执行预定动作。装夹组件设置在本体上,用于将终端装夹在本体上,使用户可以在通过终端控制机器人动作的同时通过按键控制机器人的启停,从而完成机器人示教。进而实现优化示教器结构,提升示教器操作便利性,提升用户使用体验的技术效果。
12.另外,本实用新型提供的上述示教器还可以具有如下附加技术特征:
13.在上述技术方案中,示教器还包括:控制器,连接按键和无线通信组件,用于根据按键的触发状态控制无线通信组件工作。
14.在该技术方案中,示教器上还设置有控制器,控制器设置在本体上,且控制器分别与按键和无线通信组件相连接。当按键被用户触发时,控制器基于按键的触发动作生成对应的控制指令,其后控制器控制无线通信组件将该控制指令发送至机器人上,以通过该控制指令控制机器人。具体地,控制指令包括停机指令和启动指令,停机指令用于在加工出现问题或用户需要做出调整时控制机器人停止动作。对应地,启动指令用于在用户完成调整后重启机器人,或在加工的初始阶段控制机器人开机并动作。通过设置控制器,实现了示教器的智能化控制和自动化控制,从而降低人为介入程度。进而实现提升示教器控制效率和控制可靠性,提升示教器实用性的技术效果。
15.在上述任一技术方案中,终端包括第一终端和第二终端,示教器包括:第一终端,装夹于装夹组件上。
16.在该技术方案中,对终端做出了展开说明。终端包括第一终端和第二终端。示教器上设置有第一终端,且第一终端可以通过装夹组件装夹在本体上。具体地,第一终端为示教器上的固有结构,是与本体配套的示教器专用终端。第二终端为用户所持有的移动终端,例如平板电脑或笔记本电脑,用户可通过第二终端上所固有的无线通信装置连接无线通信组件。相较于第二终端来说,第一终端的专用性较强,其上设置的案件对应于示教器所示教的机器人的特定功能,可为用户控制机器人工作提供便利条件。例如,第一终端上可以设置实体手柄,用户可以通过操作实体手柄来调整机器人姿态。而用户在使用自身的第二终端调
整机器人姿态时,仅能通过第二终端所显示出的虚拟手柄完成控制,其操作感和控制精度均无法与第一终端相比。进而实现了优化示教器结构,提升示教器实用性和可靠性,提升机器人控制精度的技术效果。
17.在上述任一技术方案中,本体包括:支架,装夹组件设于支架上;手柄,与支架相连接。
18.在该技术方案中,对本体结构做出了展开说明。具体地,本体包括支架和手柄。支架用于承拖终端,装夹组件设置在支架上,以使终端可以通过装夹组件可拆卸地安装在支架上。手柄为握持结构,手柄设置在支架上,用户可以通过握持手柄来操作终端和/或按键。相较于直接握持终端来说,通过设置支架和手柄,可以为用户操作示教器提供便利条件,提升操作感的同时降低终端掉落的概率。进而实现优化示教器结构,提升示教器实用性和可操作性,提升用户使用体验的技术效果。
19.在上述任一技术方案中,支架位于第一终端和手柄之间。
20.在该技术方案中,对支架、第一终端和手柄之间的位置关系做出了限定。具体地,手柄位于支架的背面,第一终端位于支架上背离手柄的一侧,也就是位于支架的正面,从而将第一终端和手柄布局在支架的两侧。通过将支架设置在第一终端和手柄之间,使用户在握持背面的手柄时,第一终端可以停留在用户面前,从而为用户操作示教器提供便利条件。例如,用户可左手握持手柄,右手在第一终端上执行触控操作。进而实现优化本体结构布局,提升示教器实用性和操作便利性,为用户操作示教器提供便利条件的技术效果。
21.在上述任一技术方案中,按键包括:第一按键,设于支架上,与控制器相连接,用于在触发时通过无线通信组件控制机器人停机。
22.在该技术方案中,对按键结构做出展开说明。具体地,按键包括第一按键,第一按键设置在支架上,且第一按键与控制器相连接。其中,第一按键对应于急停功能,用户控制机器人立即停止当前动作。工作过程中,当用户触发第一按键时,控制器基于该触发动作生成停机指令,同时通过无线通信组件和机器人之间建立的第二无线通信连接将停机指令发送至机器人上,以通过该停机指令控制机器人停止当前动作。通过设置第一按键,使用户可以在发现加工异常或安全隐患时通过触发第一按键来实现机器人的紧急制动,从而避免出现机器人伤人或工件断裂等加工事故。将第一按键作为设置在支架上的一个独立功能结构,使用户可以在紧急情况下在支架上迅速观察到第一按键的位置并完成触发动作,以保证操作及时性并降低误操作概率。进而实现优化按键结构,提升按键实用性和可靠性,提升机器人工作安全性的技术效果。
23.在上述任一技术方案中,按键还包括:第二按键,设于手柄上,与控制器相连接,用于在触发时通过无线通信组件控制机器人启动。
24.在该技术方案中,按键还包括第二按键。第二按键设置在手柄上,具体位于手柄上靠近用户手指停留区域的位置。且第二按键与控制器相连接。第二按键可用于控制机器人启动。工作过程中,当用户触发第二按键时,控制器基于该触发动作生成启动指令,同时通过无线通信组件和机器人之间建立的第二无线通信连接将启动指令发送至机器人上,以通过该启动指令控制机器人根据获取到的动作信息执行对应的预设动作。通过将第二按键设置在手柄上,可以为用户触发第二按键提供便利条件,便于用户通过握持手操作第二按键。进而实现优化按键结构布局,降低按键操作难度,提升用户使用体验的技术效果。
25.在上述任一技术方案中,第二按键为三位置使能开关。
26.在该技术方案中,第二按键为三位置使能开关。该使能开关可以通过调整位置来实现对应的控制。例如,使能开关可以控制机器人停机或启动。使能开关还可以具备自动会弹功能,以在用户按压触发时控制机器人动作,在用户停止触发使能按键回弹时控制机器人停止工作,从而实现机器人的精细控制和安全控制。进而实现优化按键结构,拓宽按键功能,降低机器人控制难度的技术效果。
27.在上述任一技术方案中,装夹组件包括:第一定位部,设于支架上;第二定位部,可移动地设于支架上,与第一定位部相对设置。
28.在该技术方案中,对装夹组件的结构做出了展开说明。具体地,装夹组件包括第一定位部和第二定位部。第一定位部设置固定在支架上,位于支架上背离手柄的一侧。第二定位部与支架可移动相连接,且第二定位部在支架上与第一定位部相对设置。其中,将终端安装在支架上的过程中,先控制第二定位部远离第一定位部,其后将终端放置在第一定位部和第二定位部之间,最终通过操作第二定位部使第一定位部和第二定位部均抵靠在终端上,从而完成终端的装夹。该技术方案所限定的装夹组件具备结构复杂度低,可靠性强的优点。可以实现优化装夹组件结构,提升终端定位稳定性,缩减示教器成本的技术效果。
29.在上述任一技术方案中,装夹组件还包括:
30.弹性件,连接支架和第二定位部,位于第一定位部和第二定位部之间。
31.在该技术方案中,装架组件上还设置有弹性件,弹性件的一端与支架相连接,另一端与第二定位部相连接。且弹性件设置在第一定位部和第二定位部之间。当用户拖动第二定位部移动,以使第一定位部和第二定位部之间的距离大于预定距离时,弹性件被拉伸积累弹性势能。其后用户松开第二定位部,第二定位部在弹性件的作用下朝靠近第一定位部的方向移动,从而最终将第一定位部和第二定位部抵靠在终端上,以完成终端在支架上的装夹。通过设置弹性件,使弹性件可以为第二定位部提供动力,以确保终端可以被第二定位部紧锁在支架上,降低终端错位甚至脱落的概率。进而实现优化装夹组件结构,提升装夹组件可靠性的技术效果。
32.在上述任一技术方案中,无线通信组件包括:第一无线通信装置,用于连接终端,以获取由终端发出的动作信息。
33.在该技术方案中,对无线通信组件的结构做出了展开说明。具体地,无线通信装置包括第一无线通信装置,第一无线通信装置与控制器相连接。在用户需要通过终端控制机器人动作时,在终端和第一无线通信装置之间建立第一无线通信连接,以使用户在终端上所编写的机器人动作信息可以通过第一无线通信装置发送至控制器。通过设置第一无线通信装置使用户可以在需要控制机器人动作时临时将终端与无线通信组件远程连接,以完成机器人的远程控制,在不需要控制机器人动作时断开第一无线通信连接并使用该终端执行其他工作。从而免去了终端和本体之间的实体连接结构,并将终端从示教器的必备结构中剔除。进而实现了优化示教器结构,降低示教器成本,为用户提供便利条件的技术效果。其中,第一无线通信装置为蓝牙连接装置和/或无线网络连接装置。
34.在上述任一技术方案中,无线通信组件还包括:第二无线通信装置,用于连接机器人,以将动作信息发送至机器人。
35.在该技术方案中,无线通信装置中还设置有第二无线通信装置,第二无线通信装
置与控制器相连接。在用户需要通过终端控制机器人动作时,在机器人和第二无线通信装置之间建立第二无线通信连接,以使控制器经由终端所获取的机器人动作信息可以通过第二无线通信连接发送至机器人上,以通过动作信息控制机器人执行与动作信息相对应的加工动作,从而完成机器人的远程控制和精准控制。通过设置可与机器人建立第二无线通信连接的第二无线通信装置,免去了示教器和机器人之间的线缆结构,使示教器可以远程控制机器人执行预定动作。一方面解决了相关技术中所存在的示教器和机器人之间的线缆结构拖动难度大,易缠绕或剐蹭用户以及其他设备的技术问题,使用户可以在地面环境和空间环境较为复杂的场景中控制机器人工作并自由移动。另一方面,免去示教器和机器人之间的线缆使用户可以通过本技术所限定的示教器上的无线通信组件和多台机器人中的任意一台机器人建立第二无线通信连接并完成控制。以及在用户需要控制其他机器人时可断开当前第二无线通信连接并与其他机器人建立第二无线通信连接以转而控制其他机器人。从而实现了示教器和多个机器人的适配和控制,解决了每台机器人均需要配置一个专用示教器,成本较高的技术问题。进而实现优化示教器结构,为用户提供便利条件,降低事故发生概率,缩减用户采购成本的技术效果。其中,第二无线通信装置为蓝牙连接装置和/或无线网络连接装置。
36.本实用新型第二方面提供了一种机器人,机器人包括:如上述任一技术方案中的示教器。
37.在该技术方案中,提出了一种设置有上述任一技术方案中的示教器的机器人。用户可通过上述任一技术方案中的示教器对机器人进行远程控制。因此,该机器人具备上述任一技术方案中的示教器的全部优点,可实现上述任一技术方案中的示教器所能实现的技术效果。为避免重复,此处不再赘述。
38.在上述任一技术方案中,机器人还包括:机械臂;第三无线通信装置,设于机械臂上,用于连接示教器的无线通信组件。
39.在该技术方案中,机器人包括机械臂以及设置在机械臂上的第三通信装置。具体地,机械臂为机器人的主工作部,其末端装夹有加工装置。加工装置包括刀具、焊接装置、喷涂装置等。以使装夹有加工装置的机械臂可以通过执行预定动作来完成针对目标工件的切屑、焊接、喷漆等工艺,从而提升工件的加工精度和加工效率。在此基础上,机械臂上设置有第三无线通信装置,第三无线通信装置用于与示教器上的第二无线通信装置建立第二无线通信连接,以使用户在终端上编写的动作信息可以发送至第三无线通信装置上,从而通过动作信息控制机械臂完成预定加工动作。通过在机器人上设置与第二无线通信装置适配的第三无线通信装置,解决了相关技术中所存在的示教器和机器人之间的线缆结构拖动难度大,易缠绕或剐蹭用户以及其他设备的技术问题。进而实现优化机器人结构,提升机器人加工精度,提升机器人工作安全性和可靠性,为用户提供便利条件的技术效果。
40.在上述任一技术方案中,机器人还包括:控制装置,连接第三无线通信装置和机械臂,用于控制机械臂动作。
41.在该技术方案中,机器人上还设置有控制装置,控制装置与第三无线通信装置相连接,且控制装置还与机械臂上对应于各个自由度的驱动电机相连接。加工过程中,控制装置根据接收到的动作信息控制个驱动电机的转动角度和转动速度,以使机械臂可以带动其上装夹的加工装置在预定加工轨迹上移动。从而完成针对目标工件的自动加工。
42.本实用新型的附加方面和优点将在下面的描述部分中变得明显,或通过本实用新型的实践了解到。
附图说明
43.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
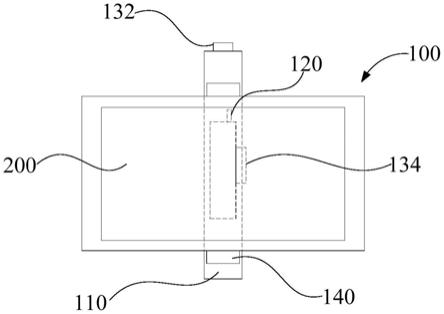
44.图1示出了根据本实用新型的一个实施例的示教器的结构示意图之一;
45.图2示出了根据本实用新型的一个实施例的示教器的结构示意图之二;
46.图3示出了根据本实用新型的一个实施例的机器人的结构示意图;
47.图4示出了根据本实用新型的一个实施例的机器人的工作示意图。
48.其中,图1至4中的附图标记与部件名称之间的对应关系为:
49.100示教器,110本体,112支架,114手柄,120无线通信组件,130按键,132第一按键,134第二按键,140装夹组件,142第一定位部,144第二定位部,200终端,300机器人,310机械臂,320第三无线通信装置。
具体实施方式
50.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具体实施方式对本实用新型进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
51.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型的保护范围并不受下面公开的具体实施例的限制。
52.下面参照图1至图4描述根据本实用新型一些实施例的示教器和机器人。
53.实施例一
54.如图1和图2所示,本实用新型的第一方面实施例提供了一种示教器100,用于机器人,示教器100包括:本体110;无线通信组件120,设于本体110上,用于连接终端200和机器人,以通过终端200控制机器人动作;按键130,设于本体110上,用于通过无线通信组件120控制机器人启停;装夹组件140,设于本体110上,用于装夹终端200。
55.在本实用新型所限定的示教器100中,示教器100包括本体110和无线通信组件120。本体110为示教器100的主体框架结构,用于定位和支撑示教器100上的其他结构。无线通信组件120为示教器100上的信息传输装置,无线通信组件120可以在终端200和机器人之间建立无线通信连接。具体地,无线通信组件120可与终端200建立第一无线通信连接,终端200是用于编写机器人程序的设备,用户可以在终端200上通过机器人编程软件编写出可用于控制机器人执行预定动作的动作信息,用户还可以通过操作终端200上的实体摇杆或虚拟摇杆生成对应于用户操作的动作信息,以通过该动作信息实现机器人的精准控制。无线通信组件120还可与机器人建立第二无线通信连接,在无线通信组件120通过第一无线通信连接由终端200获取到动作信息后,可将该动作信息通过第二无线通信连接发送至机器人上,以实现终端200对机器人的远程控制。
56.对此,本技术通过设置可与机器人建立第二无线通信连接的无线通信组件120,免
去了示教器100和机器人之间的线缆结构,使示教器100可以远程控制机器人执行预定动作。一方面解决了相关技术中所存在的示教器100和机器人之间的线缆结构拖动难度大,易缠绕或剐蹭用户以及其他设备的技术问题,使用户可以在地面环境和空间环境较为复杂的场景中控制机器人工作并自由移动。另一方面,免去示教器100和机器人之间的线缆使用户可以通过本技术所限定的示教器100上的无线通信组件120和多台机器人中的任意一台机器人建立第二无线通信连接并完成控制。以及在用户需要控制其他机器人时可断开当前第二无线通信连接并与其他机器人建立第二无线通信连接以转而控制其他机器人。从而实现了示教器100和多个机器人的适配和控制,解决了每台机器人均需要配置一个专用示教器100,成本较高的技术问题。进而实现优化示教器100结构,为用户提供便利条件,降低事故发生概率,缩减用户采购成本的技术效果。
57.通过设置可与终端200建立第一无线通信连接的无线通信组件120,使用户可以在需要控制机器人动作时临时将终端200与无线通信组件120远程连接,以完成机器人的远程控制,在不需要控制机器人动作时断开第一无线通信连接并使用该终端200执行其他工作。例如,用户可以在需要控制机器人动作时将平板电脑与无线通讯组件相连接,从而通过无线通讯组件将平板电脑上所编写的动作信息发送至机器人上,以控制机器人动作。在完成该机器人的控制后,用户断开平板电脑和无线通信组件120间的连接,使用户可以通过该平板电脑完成其他非机器人设备的控制或执行娱乐活动。从而免去了终端200和本体110之间的实体连接结构,并将终端200从示教器100的必备结构中剔除。进而实现了优化示教器100结构,降低示教器100成本,为用户提供便利条件的技术效果。
58.在此基础上,示教器100上还设置有按键130和装夹组件140。按键130设置在本体110上,用户可以通过操作按键130来控制机器人的启停。具体用户可以通过操作按键130使无线通信组件120向机器人发送停机指令,从而暂停机器人的动作,对应地,用户还可以通过操作按键130使无线通信组件120向机器人发送启动指令,以使停机状态下的机器人启动并执行预定动作。装夹组件140设置在本体110上,用于将终端200装夹在本体110上,使用户可以在通过终端200控制机器人动作的同时通过按键130控制机器人的启停,从而完成机器人示教。进而实现优化示教器100结构,提升示教器100操作便利性,提升用户使用体验的技术效果。
59.实施例二
60.如图1和图2所示,在本实用新型的第二方面实施中,示教器100还包括:控制器,连接按键130和无线通信组件120,用于根据按键130的触发状态控制无线通信组件120工作。
61.在该实施例中,示教器100上还设置有控制器,控制器设置在本体110上,且控制器分别与按键130和无线通信组件120相连接。当按键130被用户触发时,控制器基于按键130的触发动作生成对应的控制指令,其后控制器控制无线通信组件120将该控制指令发送至机器人上,以通过该控制指令控制机器人。具体地,控制指令包括停机指令和启动指令,停机指令用于在加工出现问题或用户需要做出调整时控制机器人停止动作。对应地,启动指令用于在用户完成调整后重启机器人,或在加工的初始阶段控制机器人开机并动作。通过设置控制器,实现了示教器100的智能化控制和自动化控制,从而降低人为介入程度。进而实现提升示教器100控制效率和控制可靠性,提升示教器100实用性的技术效果。
62.实施例三
63.在本实用新型的第三方面实施中,终端200包括第一终端和第二终端,示教器100包括:第一终端,装夹于装夹组件140上。
64.在该实施例中,对终端200做出了展开说明。终端200包括第一终端和第二终端。示教器100上设置有第一终端,且第一终端可以通过装夹组件140装夹在本体110上。具体地,第一终端为示教器100上的固有结构,是与本体110配套的示教器100专用终端200。第二终端为用户所持有的移动终端200,例如平板电脑或笔记本电脑,用户可通过第二终端上所固有的无线通信装置连接无线通信组件120。相较于第二终端来说,第一终端的专用性较强,其上设置的案件对应于示教器100所示教的机器人的特定功能,可为用户控制机器人工作提供便利条件。例如,第一终端上可以设置实体手柄114,用户可以通过操作实体手柄114来调整机器人姿态。而用户在使用自身的第二终端调整机器人姿态时,仅能通过第二终端所显示出的虚拟手柄114完成控制,其操作感和控制精度均无法与第一终端相比。进而实现了优化示教器100结构,提升示教器100实用性和可靠性,提升机器人控制精度的技术效果。
65.实施例四
66.如图1和图2所示,在本实用新型的第四方面实施中,本体110包括:支架112,装夹组件140设于支架112上;手柄114,与支架112相连接。
67.在该实施例中,对本体110结构做出了展开说明。具体地,本体110包括支架112和手柄114。支架112用于承拖终端200,装夹组件140设置在支架112上,以使终端200可以通过装夹组件140可拆卸地安装在支架112上。手柄114为握持结构,手柄114设置在支架112上,用户可以通过握持手柄114来操作终端200和/或按键130。相较于直接握持终端200来说,通过设置支架112和手柄114,可以为用户操作示教器100提供便利条件,提升操作感的同时降低终端200掉落的概率。进而实现优化示教器100结构,提升示教器100实用性和可操作性,提升用户使用体验的技术效果。
68.实施例五
69.如图2所示,在本实用新型的第五方面实施中,支架112位于第一终端和手柄114之间。
70.在该实施例中,对支架112、第一终端和手柄114之间的位置关系做出了限定。具体地,手柄114位于支架112的背面,第一终端位于支架112上背离手柄114的一侧,也就是位于支架112的正面,从而将第一终端和手柄114布局在支架112的两侧。通过将支架112设置在第一终端和手柄114之间,使用户在握持背面的手柄114时,第一终端可以停留在用户面前,从而为用户操作示教器100提供便利条件。例如,用户可左手握持手柄114,右手在第一终端上执行触控操作。进而实现优化本体110结构布局,提升示教器100实用性和操作便利性,为用户操作示教器100提供便利条件的技术效果。
71.实施例六
72.如图1和图2所示,在本实用新型的第六方面实施中,按键130包括:第一按键132,设于支架112上,与控制器相连接,用于在触发时通过无线通信组件120控制机器人停机。
73.在该实施例中,对按键130结构做出展开说明。具体地,按键130包括第一按键132,第一按键132设置在支架112上,且第一按键132与控制器相连接。其中,第一按键132对应于急停功能,用户控制机器人立即停止当前动作。工作过程中,当用户触发第一按键132时,控制器基于该触发动作生成停机指令,同时通过无线通信组件120和机器人之间建立的第二
无线通信连接将停机指令发送至机器人上,以通过该停机指令控制机器人停止当前动作。通过设置第一按键132,使用户可以在发现加工异常或安全隐患时通过触发第一按键132来实现机器人的紧急制动,从而避免出现机器人伤人或工件断裂等加工事故。将第一按键132作为设置在支架112上的一个独立功能结构,使用户可以在紧急情况下在支架112上迅速观察到第一按键132的位置并完成触发动作,以保证操作及时性并降低误操作概率。进而实现优化按键130结构,提升按键130实用性和可靠性,提升机器人工作安全性的技术效果。
74.实施例七
75.如图1和图2所示,在本实用新型的第七方面实施中,按键130还包括:第二按键134,设于手柄114上,与控制器相连接,用于在触发时通过无线通信组件120控制机器人启动。
76.在该实施例中,按键130还包括第二按键134。第二按键134设置在手柄114上,具体位于手柄114上靠近用户手指停留区域的位置。且第二按键134与控制器相连接。第二按键134可用于控制机器人启动。工作过程中,当用户触发第二按键134时,控制器基于该触发动作生成启动指令,同时通过无线通信组件120和机器人之间建立的第二无线通信连接将启动指令发送至机器人上,以通过该启动指令控制机器人根据获取到的动作信息执行对应的预设动作。通过将第二按键134设置在手柄114上,可以为用户触发第二按键134提供便利条件,便于用户通过握持手操作第二按键134。进而实现优化按键130结构布局,降低按键130操作难度,提升用户使用体验的技术效果。
77.实施例八
78.在本实用新型的第八方面实施中,第二按键134为三位置使能开关。
79.在该实施例中,第二按键134为三位置使能开关。该使能开关可以通过调整位置来实现对应的控制。例如,使能开关可以控制机器人停机或启动。使能开关还可以具备自动会弹功能,以在用户按压触发时控制机器人动作,在用户停止触发使能按键130回弹时控制机器人停止工作,从而实现机器人的精细控制和安全控制。进而实现优化按键130结构,拓宽按键130功能,降低机器人控制难度的技术效果。
80.实施例九
81.如图1和图2所示,在本实用新型的第九方面实施中,装夹组件140包括:第一定位部142,设于支架112上;第二定位部144,可移动地设于支架112上,与第一定位部142相对设置。
82.在该实施例中,对装夹组件140的结构做出了展开说明。具体地,装夹组件140包括第一定位部142和第二定位部144。第一定位部142设置固定在支架112上,位于支架112上背离手柄114的一侧。第二定位部144与支架112可移动相连接,且第二定位部144在支架112上与第一定位部142相对设置。其中,将终端200安装在支架112上的过程中,先控制第二定位部144远离第一定位部142,其后将终端200放置在第一定位部142和第二定位部144之间,最终通过操作第二定位部144使第一定位部142和第二定位部144均抵靠在终端200上,从而完成终端200的装夹。该实施例所限定的装夹组件140具备结构复杂度低,可靠性强的优点。可以实现优化装夹组件140结构,提升终端200定位稳定性,缩减示教器100成本的技术效果。
83.实施例十
84.在本实用新型的第十方面实施中,装夹组件140还包括:
85.弹性件,连接支架112和第二定位部144,位于第一定位部142和第二定位部144之间。
86.在该实施例中,装架组件上还设置有弹性件,弹性件的一端与支架112相连接,另一端与第二定位部144相连接。且弹性件设置在第一定位部142和第二定位部144之间。当用户拖动第二定位部144移动,以使第一定位部142和第二定位部144之间的距离大于预定距离时,弹性件被拉伸积累弹性势能。其后用户松开第二定位部144,第二定位部144在弹性件的作用下朝靠近第一定位部142的方向移动,从而最终将第一定位部142和第二定位部144抵靠在终端200上,以完成终端200在支架112上的装夹。通过设置弹性件,使弹性件可以为第二定位部144提供动力,以确保终端200可以被第二定位部144紧锁在支架112上,降低终端200错位甚至脱落的概率。进而实现优化装夹组件140结构,提升装夹组件140可靠性的技术效果。
87.实施例十一
88.在本实用新型的第十一方面实施中,无线通信组件120包括:第一无线通信装置,用于连接终端200,以获取由终端200发出的动作信息。
89.在该实施例中,对无线通信组件120的结构做出了展开说明。具体地,无线通信装置包括第一无线通信装置,第一无线通信装置与控制器相连接。在用户需要通过终端200控制机器人动作时,在终端200和第一无线通信装置之间建立第一无线通信连接,以使用户在终端200上所编写的机器人动作信息可以通过第一无线通信装置发送至控制器。通过设置第一无线通信装置使用户可以在需要控制机器人动作时临时将终端200与无线通信组件120远程连接,以完成机器人的远程控制,在不需要控制机器人动作时断开第一无线通信连接并使用该终端200执行其他工作。从而免去了终端200和本体110之间的实体连接结构,并将终端200从示教器100的必备结构中剔除。进而实现了优化示教器100结构,降低示教器100成本,为用户提供便利条件的技术效果。其中,第一无线通信装置为蓝牙连接装置和/或无线网络连接装置。
90.实施例十二
91.在本实用新型的第十二方面实施中,无线通信组件120还包括:第二无线通信装置,用于连接机器人,以将动作信息发送至机器人。
92.在该实施例中,无线通信装置中还设置有第二无线通信装置,第二无线通信装置与控制器相连接。在用户需要通过终端200控制机器人动作时,在机器人和第二无线通信装置之间建立第二无线通信连接,以使控制器经由终端200所获取的机器人动作信息可以通过第二无线通信连接发送至机器人上,以通过动作信息控制机器人执行与动作信息相对应的加工动作,从而完成机器人的远程控制和精准控制。通过设置可与机器人建立第二无线通信连接的第二无线通信装置,免去了示教器100和机器人之间的线缆结构,使示教器100可以远程控制机器人执行预定动作。一方面解决了相关技术中所存在的示教器100和机器人之间的线缆结构拖动难度大,易缠绕或剐蹭用户以及其他设备的技术问题,使用户可以在地面环境和空间环境较为复杂的场景中控制机器人工作并自由移动。另一方面,免去示教器100和机器人之间的线缆使用户可以通过本技术所限定的示教器100上的无线通信组件120和多台机器人中的任意一台机器人建立第二无线通信连接并完成控制。以及在用户需要控制其他机器人时可断开当前第二无线通信连接并与其他机器人建立第二无线通信
连接以转而控制其他机器人。从而实现了示教器100和多个机器人的适配和控制,解决了每台机器人均需要配置一个专用示教器100,成本较高的技术问题。进而实现优化示教器100结构,为用户提供便利条件,降低事故发生概率,缩减用户采购成本的技术效果。其中,第二无线通信装置为蓝牙连接装置和/或无线网络连接装置。
93.实施例十三
94.如图3所示,本实用新型的第十三方面实施提供了一种机器人300,机器人300包括:如上述任一实施例中的示教器100。
95.在该实施例中,提出了一种设置有上述任一实施例中的示教器100的机器人300。用户可通过上述任一实施例中的示教器100对机器人300进行远程控制。因此,该机器人300具备上述任一实施例中的示教器100的全部优点,可实现上述任一实施例中的示教器100所能实现的技术效果。为避免重复,此处不再赘述。
96.实施例十四
97.如图3所示,在本实用新型的第十四方面实施中,机器人300还包括:机械臂310;第三无线通信装置320,设于机械臂310上,用于连接示教器100的无线通信组件120。
98.在该实施例中,机器人300包括机械臂310以及设置在机械臂310上的第三通信装置。具体地,机械臂310为机器人300的主工作部,其末端装夹有加工装置。加工装置包括刀具、焊接装置、喷涂装置等。以使装夹有加工装置的机械臂310可以通过执行预定动作来完成针对目标工件的切屑、焊接、喷漆等工艺,从而提升工件的加工精度和加工效率。在此基础上,机械臂310上设置有第三无线通信装置320,第三无线通信装置320用于与示教器100上的第二无线通信装置建立第二无线通信连接,以使用户在终端200上编写的动作信息可以发送至第三无线通信装置320上,从而通过动作信息控制机械臂310完成预定加工动作。通过在机器人300上设置与第二无线通信装置适配的第三无线通信装置320,解决了相关技术中所存在的示教器100和机器人300之间的线缆结构拖动难度大,易缠绕或剐蹭用户以及其他设备的技术问题。进而实现优化机器人300结构,提升机器人300加工精度,提升机器人300工作安全性和可靠性,为用户提供便利条件的技术效果。
99.实施例十五
100.如图3所示,在本实用新型的第十五方面实施中,机器人300还包括:控制装置,连接第三无线通信装置320和机械臂310,用于控制机械臂310动作。
101.在该实施例中,机器人300上还设置有控制装置,控制装置与第三无线通信装置320相连接,且控制装置还与机械臂310上对应于各个自由度的驱动电机相连接。加工过程中,控制装置根据接收到的动作信息控制个驱动电机的转动角度和转动速度,以使机械臂310可以带动其上装夹的加工装置在预定加工轨迹上移动。从而完成针对目标工件的自动加工。
102.实施例十六
103.如图4所示,在本实用新型的第十六方面实施中,对本实用新型所限定的机器人300的工作过程做出了限定。具体地,用户手动触发第一按键132和/或第二按键134时,控制器接收到由触发动作所产生的io信号,其后控制器将io信号转换为无线信号,并通过第二无线通信装置将该无线信号发送至机械臂310上的第三无线通信装置320中,以通过该无线信号控制机械臂310做出预定动作。对应地,第三无线通信装置320可以将机械臂310的工况
信息通过无线通信发送至示教器100上,以便用户及时了解到机械臂310的工作状态。
104.本实用新型的描述中,术语“多个”则指两个或两个以上,除非另有明确的限定,术语“上”、“下”等指示的方位或位置关系为基于附图所述的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
105.在本实用新型的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本实用新型的至少一个实施例或示例中。在本实用新型中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
106.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。