1.本实用新型涉及手机智能操作领域,尤其是涉及一种多点自动点击机械臂。
背景技术:
2.目前,实现自动点击的技术多用于工业化工厂,门槛较高,结构复杂,使用难度大,而供普通消费者在手机上进行自动点击的设备基本只能实现固定空间一点或者有限的几个点(一般小于10)的点击或者划动作业,因此,需要一种能够实现多点操作的轻便简单的点击装置。
技术实现要素:
3.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种多点自动点击机械臂。
4.本实用新型的目的可以通过以下技术方案来实现:
5.一种多点自动点击机械臂,用以实现操作屏幕的多点点击或滑动操作,该点击机械臂包括控制组件、动力组件、结构组件和用以实现供电的电源组件,所述的结构组件包括设置在操作屏幕正上方的点击头、由相互垂直连接的竖梁和横梁形成的t型支撑件以及用以放置操作屏幕的置物单元,所述的动力组件包括用以实现竖直位置控制的第一运动单元以及相互配合实现水平位置控制的第二运动单元和第三运动单元,所述的点击头与第三运动单元连接。
6.所述的置物单元由平行设置在横梁左侧部的小置物板和大置物板构成,所述的小置物板和大置物板均垂直与横梁设置,所述的竖梁设置在横梁左端,且与小置物板和大置物板共同形成置物空间。
7.所述的小置物板和大置物板的底部均设有支脚,且大置物板的顶面设有凹槽。
8.所述的第一运动单元包括安装在横梁右侧部的第一驱动器、一端与第一驱动器的输出轴连接的第二旋转臂、与第二旋转臂另一端铰接的第一旋转臂以及左上角与第一旋转臂铰接的舵机支撑板,所述的舵机支撑板的右下角与横梁右侧部铰接,当第一驱动器依次带动第二旋转臂和第一旋转臂转动时,舵机支撑板以右下角为圆形转动实现在竖向上的位置调节。
9.所述的第二运动单元包括固定在舵机支撑板顶部的舵机固定板、安装在舵机固定板底面上的第二驱动器以及一端与第二驱动器输出轴连接的大臂。
10.所述的第三运动单元包括安装在大臂另一端的第三驱动器以及与第三驱动器输出轴连接的小臂,所述的点击头固定在小臂的自由端处。
11.所述的操作屏幕包括带有触摸屏的手机和电脑以及带有开关按压式结构的点击设备,如键盘。
12.所述的第一驱动器、第二驱动器和第三驱动器采用舵机、步进电机或伺服电机。
13.所述的竖梁、横梁、大臂、小臂、舵机固定板、舵机支撑板均由木质、金属或亚克力
材料制成。
14.所述的控制组件由控制板、设置在控制板上的扩展板、插接有sd卡的sd卡模块、无线通信模块以及相应的连接线组成,所述的无线通信模块包括红外接收器、蓝牙模块和wifi模块。
15.与现有技术相比,本实用新型具有以下优点:
16.一、结构简单:便于安装,方便携带,可供普通消费者使用。
17.二、成本低:采用常见通用物料,价格低,容易采购便于维修更换。
18.三、使用门槛低:控制板内置程序,使用者只需编辑文本文件即可让控制板读取执行,实现低门槛编程操作即便低龄高龄人群使用也没有难度,增加其对使用编程的兴趣。
19.四、使用范围广:能够实现指定时间或随机进行多点点击和划动作业。
附图说明
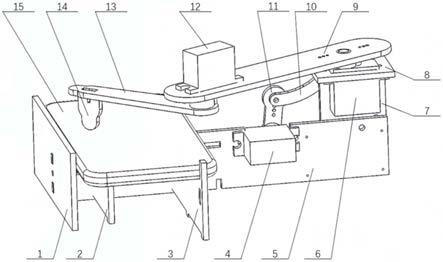
20.图1为本实用新型结构组件和动力组件的结构示意图。
21.图2为结构组件和动力组件在另一角度的结构示意图。
22.图中标记说明:
23.1、竖梁,2、小置物板,3、大置物板,4、第一舵机,5、横梁,6、第二舵机,7、舵机支撑板,8、舵机固定板,9、大臂,10、第一旋转臂,11、第二旋转臂,12、第三舵机,13、小臂,14、点击头,15、手机。
具体实施方式
24.下面结合附图和具体实施例对本实用新型进行详细说明。
25.实施例:
26.本实用新型提供一种多自由度的多点自动点击机械臂,该机械臂主要由控制组件、动力组件、结构组件和电源组件四部分组成;控制组件包括控制板、设置在控制板上的扩展板、插接有sd卡的sd卡模块、红外接收器和与红外接收器(也可以采用蓝牙或wifi模块)通信的红外遥控器以及相应的连接线,动力组件包括三个舵机、连接件和配套螺丝,结构组件包括传动臂、支撑件、点击头14、导电布以及配套螺丝;电源组件包括充电宝和供电线,分别为动力组件和控制组件供电。
27.如图1和2所示,在结构组件中,支撑件包括相互垂直连接形成t字形的竖梁1和横梁5,并且横梁5的长度大于竖梁1的长度,在横梁5的左半部分别依次垂直设有小置物板2和大置物板3,小置物板2、大置物板3上的凹槽以及竖梁1共同形成用以放置手机的空间,小置物板2和大置物板3底面均设有支脚;
28.动力组件包括用以实现竖直运动控制的第一运动单元以及相互配合实现水平位置控制的第二运动单元和第三运动单元;
29.本例中,第一运动单元包括安装在横梁5的右半部分上的第一舵机4(也可以为步进电机或伺服电机)、与第一舵机4输出轴转动连接的第二旋转臂11以及与第二旋转臂11连接的第一旋转臂10,该第一旋转臂10呈圆弧形,其一端与第二旋转臂11铰接,另一端与舵机支撑板7右上角部分铰接;
30.第二运动单元包括竖向可转动的设置在横梁5右侧的舵机支撑板7、固定在舵机支
撑板7上端的舵机固定板8、安装在舵机固定板8底面的第二舵机6(也可以为步进电机或伺服电机)以及与第二舵机6输出轴转动连接的大臂9,所述的舵机支撑板7的左下角部分与横梁5铰接,在使用时,配合与第二旋转臂11铰接的右上角部分,实现转动进而带动大臂9在竖直方向上下运动;
31.第三运动单元包括安装在大臂9远端的第三舵机12(也可以为步进电机或伺服电机)以及一端与第三舵机12输出轴转动连接的小臂13,点击头14安装在小臂13的另一端,且设置在手机屏幕的正上方。
32.本例中,第一舵机4、第二舵机6和第三舵机12的型号为sg90,控制板采用arduino nano v3.0 atmega328p,需要注意的是,arduino和stm32以及树莓派等开发板都可以实现控制功能,竖梁1、横梁5、大臂9、小臂13、舵机固定板8、舵机支撑板7可根据具体的应用环境、坚固度和质量要求选择木质、金属或亚克力材料制成。
33.通过红外遥控器发出指令,控制板通过红外接收器接收指令,并通过内置程序读取sd卡中的文本文件,按照文本文件中参数执行预定时间或随机时间的多点点击或划动作业。
34.本实用新型的工作原理如下:
35.本实用新型通过红外遥控器选择要执行的方案,之后sd卡模块读取sd卡中相应文本文件,控制板按照读取的文本文件逐条数据进行编译处理,然后控制第一舵机进行竖向位置的控制,并且控制第二舵机和第三舵机实现水平面上位置的确定,进而带动点击头移动至指定位置,并按照数据中定义要求控制第三舵机进行多点的点击或者划动作业。
技术特征:
1.一种多点自动点击机械臂,用以实现操作屏幕的多点点击或滑动操作,其特征在于,该点击机械臂包括控制组件、动力组件、结构组件和用以实现供电的电源组件,所述的结构组件包括设置在操作屏幕正上方的点击头(14)、由相互垂直连接的竖梁(1)和横梁(5)形成的t型支撑件以及用以放置操作屏幕的置物单元,所述的动力组件包括用以实现竖直位置控制的第一运动单元以及相互配合实现水平位置控制的第二运动单元和第三运动单元,所述的点击头(14)与第三运动单元连接。2.根据权利要求1所述的一种多点自动点击机械臂,其特征在于,所述的置物单元由平行设置在横梁(5)左侧部的小置物板(2)和大置物板(3)构成,所述的小置物板(2)和大置物板(3)均垂直与横梁(5)设置,所述的竖梁(1)设置在横梁(5)左端,且与小置物板(2)和大置物板(3)共同形成置物空间。3.根据权利要求2所述的一种多点自动点击机械臂,其特征在于,所述的小置物板(2)和大置物板(3)的底部均设有支脚,且大置物板(3)的顶面设有凹槽。4.根据权利要求1所述的一种多点自动点击机械臂,其特征在于,所述的第一运动单元包括安装在横梁(5)右侧部的第一驱动器、一端与第一驱动器的输出轴连接的第二旋转臂(11)、与第二旋转臂(11)另一端铰接的第一旋转臂(10)以及左上角与第一旋转臂(10)铰接的舵机支撑板(7),所述的舵机支撑板(7)的右下角与横梁(5)右侧部铰接,当第一驱动器依次带动第二旋转臂(11)和第一旋转臂(10)转动时,舵机支撑板(7)以右下角为圆形转动实现在竖向上的位置调节。5.根据权利要求4所述的一种多点自动点击机械臂,其特征在于,所述的第二运动单元包括固定在舵机支撑板(7)顶部的舵机固定板(8)、安装在舵机固定板(8)底面上的第二驱动器以及一端与第二驱动器输出轴连接的大臂(9)。6.根据权利要求5所述的一种多点自动点击机械臂,其特征在于,所述的第三运动单元包括安装在大臂(9)另一端的第三驱动器以及与第三驱动器输出轴连接的小臂(13),所述的点击头(14)固定在小臂(13)的自由端处。7.根据权利要求1所述的一种多点自动点击机械臂,其特征在于,所述的操作屏幕包括带有触摸屏的手机和电脑以及带有开关按压式结构的点击设备。8.根据权利要求1所述的一种多点自动点击机械臂,其特征在于,所述的第一驱动器、第二驱动器和第三驱动器采用舵机、步进电机或伺服电机。9.根据权利要求1所述的一种多点自动点击机械臂,其特征在于,所述的竖梁(1)、横梁(5)、大臂(9)、小臂(13)、舵机固定板(8)、舵机支撑板(7)均由木质、金属或亚克力材料制成。10.根据权利要求1所述的一种多点自动点击机械臂,其特征在于,所述的控制组件由控制板、设置在控制板上的扩展板、插接有sd卡的sd卡模块、无线通信模块以及相应的连接线组成,所述的无线通信模块包括红外接收器、蓝牙模块和wifi模块。
技术总结
本实用新型涉及一种多点自动点击机械臂,用以实现操作屏幕的多点点击或滑动操作,该点击机械臂包括控制组件、动力组件、结构组件和用以实现供电的电源组件,所述的结构组件包括设置在操作屏幕正上方的点击头、由相互垂直连接的竖梁和横梁形成的T型支撑件以及用以放置操作屏幕的置物单元,所述的动力组件包括用以实现竖直位置控制的第一运动单元以及相互配合实现水平位置控制的第二运动单元和第三运动单元,所述的点击头与第三运动单元连接。与现有技术相比,本实用新型具有多自由度多点点击、结构简单和使用范围广等优点。结构简单和使用范围广等优点。结构简单和使用范围广等优点。
技术研发人员:马明俊
受保护的技术使用者:山东智慧人电子科技有限责任公司
技术研发日:2021.05.31
技术公布日:2022/2/11