1.本发明属于上肢辅助支撑设备技术领域,具体涉及一种可变刚度上肢稳定辅助装置及其使用方法。
背景技术:
2.在日常生活中我们经常会遇到需要上肢保持稳定同时上肢进行相应精密工作的场景,如电子器具工作人员进行电路板的焊接维修工作,化学医疗行业需要对药物内滴加液体等场景。这些场景都有一个共同点,需要在工作进行时维持上肢稳定,尤其需要手臂部位足够的稳定性,避免不必要的晃动,以精确地进行工作,与此同时在工作交替期间又需要上肢有足够的自由活动,以进行其他辅助和准备工作。这种情况下就需要一种能够方便快捷控制,随时改变刚度的上肢辅助装置。常见的变刚度干扰结构有三种,分别为光纤或层干扰,颗粒干扰,链式干扰机制,这三种结构都可以实现结构刚性的改变,但各有优劣。光纤或层干扰结构利用了一束纤维或层之间在气压下的摩擦力,刚度变化仅在纵向上有刚度变化。颗粒干扰会改变机械堵塞颗粒(如咖啡粉、珠子等)的刚度;颗粒堵塞机构在多个方向上的平均刚度变化相对较大(即全方向刚度变化)由于颗粒堵塞结构灵活、适应性强,在真空压力下机械堵塞时变为单一刚性结构,但在特定方向的载荷下容易变形,且常规气压下缺少支撑,在活动情况下难以控制其行动角度和方向;链式干扰机制通过电缆驱动机构干扰串行连接的刚性结构来实现可变刚度,但全方位刚度变化的程度是有限的,因为刚性链条结构被电线干扰,很容易移动除轴向外。为了弥补不同干扰机制的不足,该发明通过颗粒干扰和链式结构相结合的方式,进一步消除颗粒干扰和链式结构的缺点,更好地实现全方位刚度控制。
技术实现要素:
3.本发明的目的在于提供一种可变刚度上肢稳定辅助装置及其使用方法。
4.本发明一种可变刚度上肢稳定辅助装置,包括机架和一根或多根辅助支撑臂。辅助支撑臂的内端安装在机架上,外端用于为使用者的上肢提供支撑;辅助支撑臂能够跟随使用者的手臂移动,且能够在不同位置锁定。所述的辅助支撑臂包括依次相连多根支撑臂。相邻两根支撑臂之间,最内端的支撑臂与机架之间均通过变刚度关节连接。
5.所述的变刚度关节包括变刚度锁止件和万向节。变刚度锁止件包括弹性干扰室、堵塞颗粒和万向节保护罩。万向节保护罩套置在万向节的外侧。弹性干扰室套置在万向节保护罩的外侧,且两端与万向节的两端分别密封连接。弹性干扰室的内侧面与万向节保护罩的外侧面之间形成内侧密闭腔;内侧密闭腔中填充有堵塞颗粒,并与真空源连接。对内侧密闭腔抽压时,弹性干扰室挤压堵塞颗粒,使得堵塞颗粒的间隙减小,变刚度关节的刚度增大。
6.作为优选,所述的变刚度关节还包括充气外罩。所述的充气外罩套置在变刚度锁止件的外侧,且两端与万向节的两端连接部密封连接。弹性干扰室的外侧面与充气外罩的
内侧面之间形成外侧密闭腔。外侧密闭腔与压力源连接。对外侧密闭腔加压时,弹性干扰室对堵塞颗粒的挤压力增大,进一步增强变刚度关节的刚度。
7.作为优选,所述弹性干扰室的外侧面上设置有沿自身轴线方向依次间隔排列的多个环形内凹部。
8.作为优选,万向节保护罩上与万向节转动部位对应的位置向外形成环形凸起。
9.作为优选,相邻两根支撑臂之间变刚度关节为双节可变刚度关节;最内端的支撑臂与机架之间的变刚度关节为单节可变刚度关节。在单节可变刚度关节中,万向节为单节万向节,仅有一个转动位置,万向节保护罩仅有一个位于中间位置的环形凸起。在双节可变刚度关节中,万向节上有两个转动位置,万向节保护罩上在两个转动位置均设有环形凸起,两个环形凸起之间的位置内凹至与万向节贴合的状态。
10.作为优选,所述辅助支撑臂的末端固定有手腕支撑架。手腕支撑架呈弧形或环形。
11.作为优选,所述辅助支撑臂的中部安装有肘部支撑架。
12.作为优选,所述的辅助支撑臂共有两根。两个辅助支撑臂的内端等高且相互间隔设置。
13.作为优选,所述的机架包括臂间支撑杆和支撑架。臂间支撑杆竖直方向滑动连接在支撑架上,且能够在多个不同位置锁止。
14.该可变刚度上肢稳定辅助装置的使用方法如下:
15.初始状态下,内侧密闭腔保持在未抽压状态。使用者将上肢与辅助支撑臂的末端连接;使用者的手臂带动辅助支撑臂的末端移动到目标位置;之后,内侧密闭腔抽压,外侧密闭腔加压,使得辅助支撑臂上的各个变刚度关节的刚度增大,辅助支撑臂整体保持固定,为使用者的上肢提供支撑。使用者在上肢受到支撑的状态下进行任务操作。
16.本发明的具体有益效果是:
17.本发明有效结合颗粒干扰和链式干扰机制,不仅在保证了工作期间全方位刚度,又可以做到非工作期间可以自由行动且维持支撑。此外,本发明属于软交互可佩戴系统,由于材质原因重量更轻,穿戴便捷,由于各关节在非工作状态下能够灵活转动,故对使用者的行动干扰极小。
附图说明
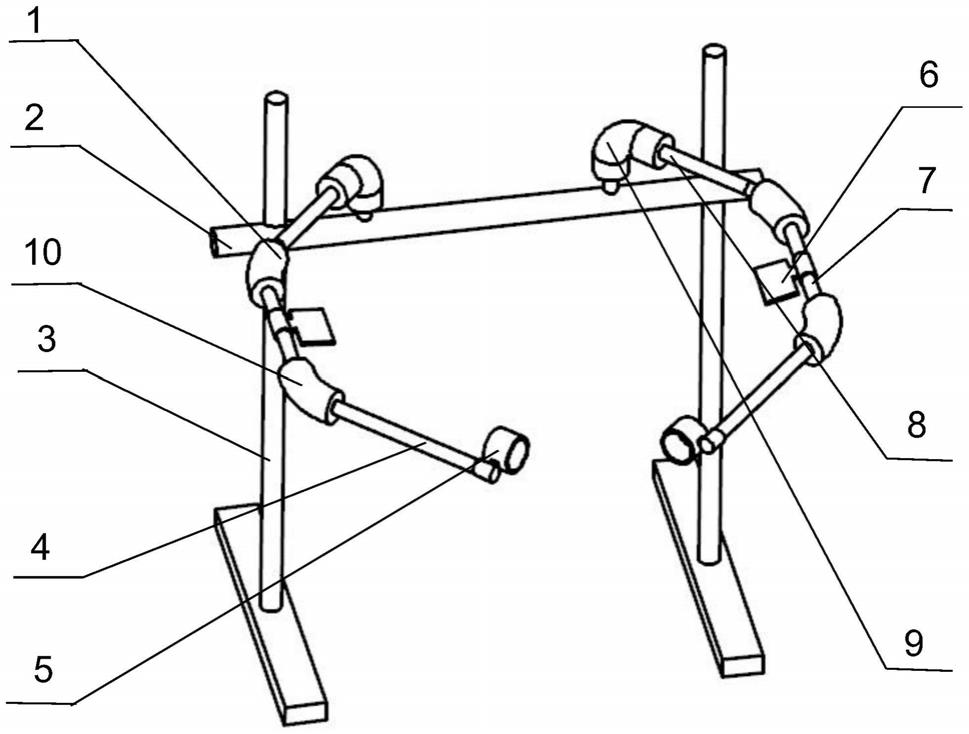
18.图1为本发明的整体结构示意图。
19.图2为本发明中单节可变刚度关节的剖面示意图。
20.图3为本发明中单节可变刚度关节的内侧密闭腔与外侧密闭腔的相对位置示意图。
21.图4为本发明中单节可变刚度关节由外至内逐步拆解的示意图。
22.图5为本发明中双节可变刚度关节的剖面示意图。
23.图6为本发明中双节可变刚度关节的内侧密闭腔与外侧密闭腔的相对位置示意图。
24.图7为本发明中双节可变刚度关节由外至内逐步拆解的示意图。
具体实施方式
25.以下结合附图对本发明作进一步说明:
26.如图1所示,一种可变刚度上肢稳定辅助装置,包括机架和两个辅助支撑臂。两个辅助支撑臂的内端均安装在机架上,外端分别用于为使用者需要精密操作的两只手臂提供支撑;辅助支撑臂能够跟随使用者的手臂任意移动,且能够在任意位置锁定为刚性结构。机架包括臂间支撑杆2和支撑架3。臂间支撑杆2竖直方向滑动连接在支撑架3上,且能够在多个不同位置锁止。
27.两个辅助支撑臂的结构相同,均包括依次相连的第一变刚度关节9、肩部支撑杆8、第二变刚度关节1、上臂支撑杆7、第三变刚度关节10、前臂支撑杆4和手腕支撑架5。第一变刚度关节9、第二变刚度关节1和第三变刚度关节10均能够在两个方向上任意弯折且能够在任意姿态下锁止为刚性结构。第一变刚度关节9采用双节可变刚度关节,其内部的万向节为双节万向节。第二变刚度关节1和第三变刚度关节10结构相同,均为单节可变刚度关节,其内部的万向节为单节万向节。双节万向节的转动范围大于单节万向节的转动范围,故位于首端的上臂支撑杆7具有更大的转动范围,使得整个辅助支撑臂更为灵活。
28.手腕支撑架5固定在前臂支撑杆4的外端。手腕支撑架5上设置有支撑环,用以在使用者的手臂穿过后提供支撑。上臂支撑杆7的中部安装有肘部支撑架6,用以对使用者的肘部或前臂提供辅助支撑。两个辅助支撑臂上的第一变刚度关节9的内端间隔设置,且均与臂间支撑杆2固定。
29.如图2、3、4、5、6和7所示,单节可变刚度关节和双节可变刚度关节均包括由外至内依次设置的充气外罩1-1、变刚度锁止件和万向节1-5。万向节1-5两端的连接部分别从充气外罩1-1的两端伸出。变刚度锁止件安装在充气外罩1-1的内部,其包括弹性干扰室1-2、堵塞颗粒1-3和万向节保护罩1-4。万向节保护罩1-4套置在万向节1-5的外侧。万向节保护罩1-4上与万向节1-5转动部位对应的位置向外突出,为万向节1-5的转动提供充足空间。
30.弹性干扰室1-2套置在万向节保护罩1-4的外侧,且两端与万向节1-5的两个连接部分别密封连接。弹性干扰室1-2的内侧面与万向节保护罩1-4的外侧面之间形成内侧密闭腔1-7;弹性干扰室1-2的外侧面与充气外罩1-1的内侧面之间形成外侧密闭腔1-6。内侧密闭腔1-7与外侧密闭腔1-6互不连通。
31.内侧密闭腔1-7中填充有堵塞颗粒1-3;内侧密闭腔1-7中被堵塞颗粒1-3填充满并留有一定的微小间隙。内侧密闭腔1-7通过管道与真空源连接;外侧密闭腔1-6通过管道与压力源连接。
32.当内侧密闭腔1-7在常规大气压下,堵塞颗粒1-3在内侧密闭腔1-7中有足够的活动空间,不影响万向节的转动;当内侧密闭腔1-7抽压后形成负压时,弹性干扰室1-2向内收缩,挤压堵塞颗粒1-3;使得相邻的堵塞颗粒1-3之间紧密连接,形成刚性结构,限制万向节的转动,进而使关节锁止。当外侧密闭腔1-6充压形成正压后,能够进一步加大弹性干扰室1-2受到的向内挤压力,从而进一步增强刚度和可靠性。
33.弹性干扰室1-2的外侧面上设置有沿自身轴线方向依次间隔排列的多个环形内凹部。当内侧密闭腔1-7抽压,外侧密闭腔1-6充压时,环形内凹部受到向内挤压,形成加强筋结构,进一步提高可变刚度关节的刚性状态下的结构强度。
34.在单节可变刚度关节中,万向节1-5上仅有一个转动位置,万向节保护罩1-4仅有
一个位于中间位置的环形凸起。在双节可变刚度关节中,万向节1-5上有两个转动位置,万向节保护罩1-4上在两个转动位置均设有环形凸起,两个环形凸起之间的位置内凹至与万向节1-5贴合的状态;当内侧密闭腔1-7抽压时,两个环形凸起之间的内凹部能够提高一个支撑点,提高变刚度锁止件的刚性状态下的稳定性。
35.该可变刚度上肢稳定辅助装置工作步骤如下:
36.步骤一:使用者将可变刚度上肢稳定辅助装置穿戴,手腕放置于手腕支撑架5上,手肘放置于肘部支撑架6上。此时第一变刚度关节9、第二变刚度关节1和第三变刚度关节10的外侧密闭腔1-6与内侧密闭腔1-7内都为标准大气压,可变刚度上肢稳定辅助装置上的中间变刚度关节1和第一变刚度关节9可以全方向转动,穿戴者可以自由运动。
37.步骤二:当工作进行需要上肢稳定时,穿戴者上肢自由运动至摆成需要的姿势,使用真空泵将各变刚度关节中的内侧密闭腔1-7内的空气全部抽离,此时内侧密闭腔1-7收紧,弹性干扰室1-2在内部气压减少的作用下挤压堵塞颗粒1-3,使堵塞颗粒1-3聚集在一起,从而达到限制万向节1-5自由度的作用,使中间变刚度关节1和第一变刚度关节9拥有全方位刚度;与此同时使用充气泵对中间变刚度关节1和第一变刚度关节9中的外侧密闭腔1-6进行充气,外侧密闭腔1-6膨胀,弹性干扰室1-2的外部气压增加,从而对弹性干扰室1-2外壁产生一个向内挤压的力,进而加强对内侧密闭腔1-7中的堵塞颗粒1-3挤压,增强堵塞颗粒1-3的聚集程度,从而进一步对万向节1-5形成全自由度的锁定,并由于弹性干扰室1-2凸起部分形状与外侧密闭腔1-6的膨胀空气的挤压作用形成多个加强筋,增加工作过程中可变刚度关节的刚度,进一步在工作中实现可变刚度关节1的全方位刚度。
38.步骤三:当使用者的操作结束时,通过真空泵和充气泵的作用使内侧密闭腔1-7和外侧密闭腔1-6恢复标准大气压,此时内侧密闭腔1-7中的堵塞颗粒1-3开始分散,回复自由运动能力,中间变刚度关节1和第一变刚度关节9恢复全方向转动能力,可变刚度上肢稳定辅助装置恢复活动能力,穿戴者可以全方位运动。