1.一种带有颜色识别功能的工业机器人末端执行器,属于工业机器人技术设备领域。
背景技术:
2.工业机器人在制造业中有很多的应用场景,例如利用工业机器人进行货物的搬运、码垛、焊接和喷涂作业等。其中很多应用场合是需要用到对物品颜色识别来进行产品的分类、加工和装配等操作,现如今绝大部分工业机器人的颜色识别功能是通过具有一系列算法的摄像头来判断处理,此类工业机器人末端工具不仅价格昂贵,并且维修难度大。
技术实现要素:
3.本实用新型要解决的技术问题是:克服现有技术的不足,提供一种通过设置颜色传感器,实现了对所吸取物品颜色的识别,避免了现有技术中通过算法实现颜色识别时价格昂贵、维修难度大等缺陷的带有颜色识别功能的工业机器人末端执行器。
4.本实用新型解决其技术问题所采用的技术方案是:该带有颜色识别功能的工业机器人末端执行器,其特征在于:包括支柱,在支柱的顶部设置有固定架,在固定架的一侧设置有颜色传感器,在固定架的另一侧设置有往复运动的吸盘;在固定架的侧部固定有电路板,在电路板上设置有控制电路,颜色传感器接入控制电路,控制电路同时与工业机器人通讯。
5.优选的,所述的固定架包括固定板,在固定板其中一侧侧边的两端对称设置有一个支架,所述颜色传感器固定在两侧支架的顶部。
6.优选的,在所述固定板另一侧开设有贯穿固定板上下端面的固定架通孔,传动轴从固定架通孔中穿过,吸盘固定在传动轴的顶部,传动轴的后端连接驱动机构。
7.优选的,在所述支柱的底部固定有底板,底板与所述的工业机器人连接。
8.优选的,在所述传动轴的表面突出设置有挡圈,挡圈位于吸盘的下部,在传动轴的外圈套装有弹簧,弹簧位于挡圈和固定板的上表面之间。
9.优选的,在所述固定板的中部开设有固定槽,在固定槽的内部开设有固定孔,立柱的顶部正对固定槽,通过与固定孔一一对应的螺钉将立柱固定在固定板的底面。
10.优选的,所述的控制电路包括型号为stc89c52rc的微处理器u1,微处理器u1的4脚同时连接电阻r2以及电容c3的一端,电阻r2的另一端接地,电容c3的另一端连接+5v直流电源,微处理器u1的5脚、7脚为串口通讯接口,微处理器u1的11脚连接型号为ws2812rgb的rgb灯珠,微处理器u1的12脚~13脚所述颜色传感器连接,微处理器u1的14脚、15脚分别连接电容c1~c2的一端,并分别连接晶振x1的两端,电容c1~c2的一端接地;+5v直流电源串联电阻r1后连接发光二极管led1的阳极,发光二极管led1的阴极连接微处理器u1的40脚;
11.还包括型号为pc817的光耦芯片g1~g4,光耦芯片g1~g4的1脚同时连接+5v直流电源,光耦芯片g1~g4的2脚分别连接微处理器u1的41~44脚,光耦芯片g1~g4的3脚接地,光耦
芯片g1~g4的4脚分别连接接线端子p1的1~4脚,p1与所述的工业机器人连接,光耦芯片g1~g4的4脚还分别连接电阻r7~r11的一端,电阻r7~r11的另一端连接+24v直流电源。
12.与现有技术相比,本实用新型所具有的有益效果是:
13.1、在本带有颜色识别功能的工业机器人末端执行器中,通过设置颜色传感器,实现了对所吸取物品颜色的识别,避免了现有技术中通过算法实现颜色识别时价格昂贵、维修难度大等缺陷。
14.2、通过设置吸盘,便于对待检测物品进行吸取。
15.3、在控制电路中设置有rgb灯珠,由微处理器驱动rgb灯珠发出与待测物品颜色相同的光,便于对颜色传感器所识别的颜色进行验证。
附图说明
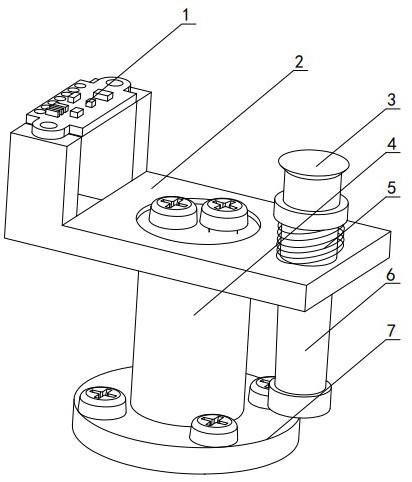
16.图1为带有颜色识别功能的工业机器人末端执行器轴测图。
17.图2为带有颜色识别功能的工业机器人末端执行器正视图。
18.图3为带有颜色识别功能的工业机器人末端执行器固定架轴测图。
19.图4带有颜色识别功能的工业机器人末端执行器控制电路原理图。
20.其中:1、颜色传感器
ꢀꢀ
2、固定架
ꢀꢀ
3、吸盘
ꢀꢀ
4、支柱
ꢀꢀ
5、弹簧
ꢀꢀ
6、传动轴
ꢀꢀ
7、底板
ꢀꢀ
8、支架
ꢀꢀ
9、固定槽
ꢀꢀ
10、固定架通孔。
具体实施方式
21.图1~4是本实用新型的最佳实施例,下面结合附图1~4对本实用新型做进一步说明。
22.如图1~2所示,一种带有颜色识别功能的工业机器人末端执行器(以下简称末端执行器),包括圆柱形的立柱4,在立柱4的底部固定有底板7,底板7为圆盘状,底板7与立柱4同心固定。在底板7的外圈开设有多个固定孔,通过底板7上的固定孔将本末端执行器安装在工业机器人的最后一个轴上。在立柱4的顶部固定有固定架2,在固定架2的一侧设置有颜色传感器1,另一侧设置有吸盘3。
23.结合图3,固定架2包括固定板,在固定板的中部开设有固定槽9,在固定槽9的内部开设有固定孔,立柱4的顶部正对固定槽9,通过与固定孔一一对应的螺钉,将立柱4固定在固定板的底面。在固定板其中一侧侧边的两端对称设置有一个支架8,支架8与固定板的板面垂直,在两侧支架8的顶部开设有固定孔,颜色传感器1架设在两侧支架8的顶部并通过支架8顶部的固定孔固定。
24.在固定架2的侧部还安装有本末端执行器的电路板(图中未画出),在电路板上设置有本末端执行器的控制电路,颜色传感器1的输出端接入控制电路中,将所测物体的颜色信息送入控制电路中。
25.在固定槽9的一侧开设有贯穿固定板上下端面的固定架通孔10,传动轴6从固定架通孔10中穿过。在传动轴6的顶部安装有吸盘3。在传动轴6的表面突出设置有挡圈,挡圈位于吸盘3的下部,在传动轴6的外圈套装有弹簧5,弹簧5位于挡圈和固定板的上表面之间。传动轴6的下端从固定架通孔10穿出后与外部驱动机构(气缸、电缸等),由驱动机构带动传动轴6往复运动,进一步带动吸盘3同步运动。
26.如图4所示,上述的控制电路包括型号为stc89c52rc的微处理器u1,微处理器u1的1~3脚悬空,6脚悬空,8~10脚悬空,16~28脚悬空,30~37脚悬空。微处理器u1的16~17脚接地,39脚接地。微处理器u1的29脚、38脚连接+5v直流电源。
27.微处理器u1的4脚同时连接电阻r2以及电容c3的一端,电阻r2的另一端接地,电容c3的另一端连接+5v直流电源。微处理器u1的5脚、7脚为串口通讯接口。微处理器u1的11脚连接型号为ws2812rgb的rgb灯珠,驱动该灯珠发出不同的颜色。微处理器u1的12脚~13脚为iic通信接口,实现与上述颜色传感器1连接, 通过该接口可以控制颜色传感器1工作,比如发送指令控制其工作模式,以及读出颜色数值等功能。微处理器u1的14脚、15脚分别连接电容c1~c2的一端,并分别连接晶振x1的两端,电容c1~c2的一端接地。+5v直流电源串联电阻r1后连接发光二极管led1的阳极,发光二极管led1的阴极连接微处理器u1的40脚。
28.还包括型号为pc817的光耦芯片g1~g4,光耦芯片g1~g4的1脚同时连接+5v直流电源,光耦芯片g1~g4的2脚分别连接微处理器u1的41~44脚,光耦芯片g1~g4的3脚接地,光耦芯片g1~g4的4脚分别连接接线端子p1的1~4脚。光耦芯片g1~g4的4脚还分别连接电阻r7~r11的一端,电阻r7~r11的另一端连接+24v直流电源。通过p1与工业机器人进行通讯,将颜色传感器1采集到的rgb数据发送至工业机器人。
29.具体工作过程及工作原理如下:
30.本末端执行器通过底板7上的固定孔将本末端执行器安装在工业机器人的最后一个轴上,工业机器人带动本末端执行器移动。传动轴6的下端与外部驱动机构连接后,外部驱动机构带动传动轴6工作,当外部驱动机构带动传动轴6前伸时,通过传动轴6前端的吸盘3吸取待检测的物品。
31.当吸盘3吸取待检测的物品之后,微处理器控制颜色传感器1对物品的颜色进行识别,并将物品的rgb数据送入控制电路的微处理器中。微处理器接收到颜色传感器1的rgb数据之后,驱动rgb灯珠发出相应颜色的光,同时将rgb数据发送至工业机器人,由工业机器人进行进一步处理。
32.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。