1.本发明涉及机器人加工技术领域,特别涉及机器人运行的控制及监视方法、装置及计算机可读存储介质。
背景技术:
2.机器人生产线一般是通过现场级控制器将机器人连接在一起,当其中一台机器人发生报警时,其它机器人均停机并报警,操作人员根据查看到的机器人示教盒提示信息以及监控报警io点(输入输出端子),判断哪一台机器人触发的报警,以及报警的原因,然后排除故障。操作人员根据机器人作业情况定期维护,比如为机器人轴更换润滑油、更换机器人存储电池等,操作人员需定期查看机器人示教盒信息来判断是否需要保养以及需做哪些保养。
3.然而,机器人系统报警时,报警信息只能通过io点输出,当拥有多台机器人协调作业的机器人产线报警时,很难快速判断出机器人报警的原因,以及哪一台机器人触发的报警;当机器人需要维护时,需操作人员通过示教盒检查维护信息,经常出现遗漏和疏忽。
技术实现要素:
4.有鉴于此,本发明的目的在于提出一种机器人运行的控制及监视方法、一种机器人运行的控制及监视装置及一种计算机可读存储介质,可快速提醒操作人员哪一台机器人出现故障,并显示和播报故障信息,还可显示和播报机器人的维护数据信息。
5.本发明提出一种机器人运行的控制及监视方法,其包括以下步骤:
6.机器人发生故障时触发警报以提醒操作人员哪一台机器人出现故障;
7.通过5g载体传输所述机器人的故障数据;
8.分析所述故障数据,并获得和显示故障信息;
9.采用闪烁及语音形式播报所述故障信息;
10.传输所述机器人底层的维护数据信息;以及
11.显示和/或播报所述维护数据信息。
12.在机器人运行的控制及监视方法的一种示意性实施例中,所述故障信息包括故障数据、故障点和故障原因。
13.在机器人运行的控制及监视方法的一种示意性实施例中,所述维护数据信息包括机器人轴更换润滑油信息和更换机器人存储电池信息。
14.在机器人运行的控制及监视方法的一种示意性实施例中,所述机器人的数量为多个。
15.本实用新型还提出一种机器人运行的控制及监视装置,其配置在机器人旁。所述机器人运行的控制及监视装置包括数据显示监控模块、机器人报警装置、声光报警模块以及机器人预维护信息模块。所述机器人报警装置安装于所述机器人上,所述机器人报警装置适于在所述机器人发生故障时触发警报以提醒操作人员哪一台机器人出现故障,且所述
机器人通过5g载体将所述机器人的故障数据传输给所述数据显示监控模块,所述数据显示监控模块分析所述故障数据并获得和显示故障信息。所述数据显示监控模块将所述故障信息传输给所述声光报警模块,所述声光报警模块采用闪烁及语音形式播报所述故障信息。所述机器人预维护信息模块将所述机器人底层的维护数据信息传输给所述数据显示监控模块,由所述数据显示监控模块显示所述维护数据信息,由所述声光报警模块播报所述维护数据信息。
16.在机器人运行的控制及监视装置的一种示意性实施例中,所述机器人运行的控制及监视装置还包括机器人应用程序模块,所述机器人应用程序模块通过5g载体与所述数据显示监控模块通信,当需变更所述机器人的作业程序时,通过所述机器人应用程序模块和所述数据显示监控模块修改所述机器人的控制指令。
17.本实用新型又提出一种机器人运行的控制及监视装置,其包括处理器和存储器;所述存储器中存储有可被所述处理器执行的应用程序,用于使得所述处理器执行上述任意一种所述的机器人运行的控制及监视方法。
18.本实用新型再提出一种计算机可读存储介质,其中存储有计算机可读指令,该计算机可读指令用于执行上述任意一种所述的机器人运行的控制及监视方法。
19.在本发明的机器人运行的控制及监视方法、装置及计算机可读存储介质中,可快速锁定发生故障的机器人,提醒操作人员哪一台机器人出现故障,分析故障数据并获得和显示故障信息,且采用闪烁及语音形式播报故障信息,还可显示和播报机器人底层的维护数据信息,可实现较佳的用户体验和较高的生产效率。
附图说明
20.下面将通过参照附图详细描述本发明的优选实施例,使本领域的普通技术人员更清楚本发明的上述及其它特征和优点,附图中:
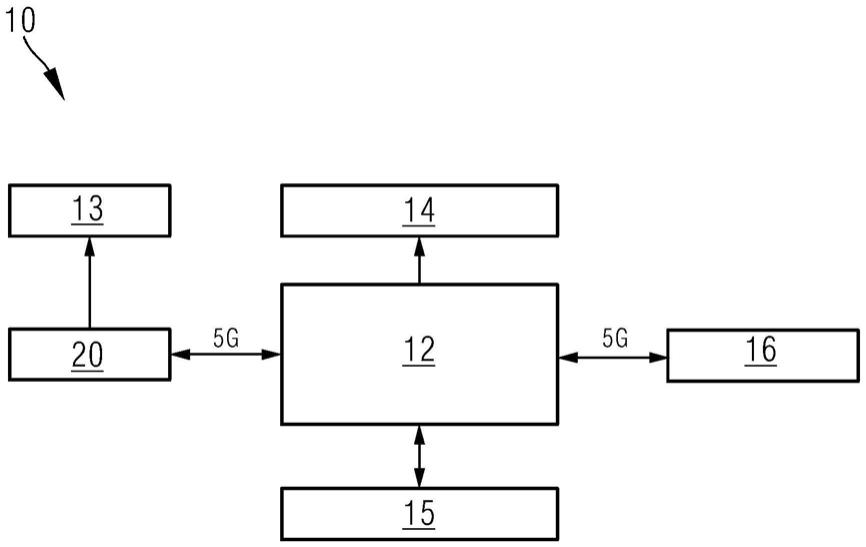
21.图1为本发明一实施例的机器人运行的控制及监视装置的架构示意图。
22.图2为图1所示的机器人运行的控制及监视装置与机器人的连接示意图。
23.在上述附图中,所采用的附图标记如下:
24.10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机器人运行的控制及监视装置
25.12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
数据显示监控模块
26.13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机器人报警装置
27.14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
声光报警模块
28.15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机器人预维护信息模块
29.16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机器人应用程序模块
30.20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机器人
具体实施方式
31.为使本发明的目的、技术方案和优点更加清楚,以下举实施例对本发明进一步详细说明。
32.图1为本发明一实施例的机器人运行的控制及监视装置的架构示意图,图2为图1所示的机器人运行的控制及监视装置与机器人的连接示意图,请参见图1和图2,本实施例
的机器人运行的控制及监视装置10配置在机器人20旁,其包括数据显示监控模块12、机器人报警装置13、声光报警模块14和机器人预维护信息模块15。机器人报警装置13安装于机器人20上,机器人报警装置13适于在机器人20发生故障时触发警报以提醒操作人员哪一台机器人20出现故障,且机器人20通过5g载体将机器人20的故障数据传输给数据显示监控模块12,数据显示监控模块12分析所述故障数据并获得和显示故障信息。数据显示监控模块12将故障信息传输给声光报警模块14,声光报警模块14采用闪烁及语音形式播报所述故障信息。机器人预维护信息模块15将机器人20底层的维护数据信息传输给数据显示监控模块12,由数据显示监控模块12显示所述维护数据信息,由声光报警模块14播报所述维护数据信息。
33.更具体地,所述故障信息包括故障数据、故障点和故障原因。所述维护数据信息包括机器人轴更换润滑油信息和更换机器人存储电池信息等。显示和/或播报所述维护数据信息,可依据提示等级的需求任意设定,换言之,可由数据显示监控模块12显示所述维护数据信息,而不播报所述维护数据信息,也可由数据显示监控模块12显示所述维护数据信息,同时由声光报警模块14播报所述维护数据信息。
34.需要说明的是,机器人20的数量为多个,在本实施例中,机器人20的数量为3个,3个机器人20均通过5g载体与数据显示监控模块12通信。
35.机器人运行的控制及监视装置10还包括机器人应用程序模块16,机器人应用程序模块16通过5g载体与数据显示监控模块12通信,当需变更机器人20的作业程序时,通过机器人应用程序模块16和数据显示监控模块12修改机器人20的控制指令。
36.需要说明的是,机器人20和数据显示监控模块12之间通过5g载体通信,数据显示监控模块12和机器人应用程序模块16之间通过5g载体通信,5g载体通信可采用无线或有线的方式。机器人预维护信息模块15可集成于数据显示监控模块12上。
37.本发明还提出一种机器人运行的控制及监视方法,其包括以下步骤:
38.机器人20发生故障时触发警报以提醒操作人员哪一台机器人20出现故障;
39.通过5g载体传输机器人20的故障信息数据;
40.分析所述故障数据,并获得和显示故障信息;
41.采用闪烁及语音形式播报所述故障信息;
42.传输机器人20底层的维护数据信息;以及
43.显示和/或播报所述维护数据信息。
44.更进一步地,本发明的机器人运行的控制及监视方法还包括以下步骤:
45.当需变更机器人20的作业程序时,通过机器人应用程序模块16和数据显示监控模块12修改机器人20的控制指令。
46.本发明通过5g技术为信息载体,将机器人底层的报警信息、运行数据和预维护信息传输到数据显示监控模块12,以达到对机器人20进行控制和对机器人20的运行进行监控的目的。
47.机器人生产线中有若干台机器人同时工作,当其中有机器人20发生故障报警时,机器人20报警装置触发,能让作业者迅速知道哪一台机器人20发生故障,并将详细数据传输给数据显示监控模块12,声光报警模块14采用闪烁及语音形式播报详细报警信息及故障点,以达到快速处理故障的目的。此外,机器人预维护信息模块15将机器人20底层的数据传
输到数据显示监控模块12,将需要预维护的信息显示和/或播报,以达到及时保养维护机器人20的目的。机器人应用程序模块16可以通过数据显示监控模块12实现控制机器人20和测试机器人20的特殊应用及功能,例如,当待加工的工件变化,机器人20的加工程序需变更(增加或改动)时,通过机器人应用程序模块16和数据显示监控模块12对机器人20的控制程序作修改。
48.本发明实施方式还提出了一种具有处理器-存储器架构的、机器人运行的控制及监视装置,所述机器人运行的控制及监视装置包括处理器、存储器及存储在所述存储器上并可在处理器上运行的计算机程序,计算机程序被处理器执行时实现如上任一种的机器人运行的控制及监视方法。
49.其中,存储器具体可以实施为电可擦可编程只读存储器(eeprom)、快闪存储器(flash memory)、可编程程序只读存储器(prom)等多种存储介质。处理器可以实施为包括一或多个中央处理器或一或多个现场可编程门阵列,其中现场可编程门阵列集成一或多个中央处理器核。具体地,中央处理器或中央处理器核可以实施为cpu或mcu或dsp,等等。
50.需要说明的是,上述各流程和各结构图中不是所有的步骤和模块都是必须的,可以根据实际的需要忽略某些步骤或模块。各步骤的执行顺序不是固定的,可以根据需要进行调整。各模块的划分仅仅是为了便于描述采用的功能上的划分,实际实现时,一个模块可以分由多个模块实现,多个模块的功能也可以由同一个模块实现,这些模块可以位于同一个设备中,也可以位于不同的设备中。
51.各实施方式中的硬件模块可以以机械方式或电子方式实现。例如,一个硬件模块可以包括专门设计的永久性电路或逻辑器件(如专用处理器,如fpga或asic)用于完成特定的操作。硬件模块也可以包括由软件临时配置的可编程逻辑器件或电路(如包括通用处理器或其它可编程处理器)用于执行特定操作。至于具体采用机械方式,或是采用专用的永久性电路,或是采用临时配置的电路(如由软件进行配置)来实现硬件模块,可以根据成本和时间上的考虑来决定。
52.本发明的机器人运行的控制及监视方法、装置及计算机可读存储介质至少具有以下的优点:
53.1.在本发明的机器人运行的控制及监视方法、装置及计算机可读存储介质中,可快速锁定发生故障的机器人,提醒操作人员哪一台机器人出现故障,分析故障数据并获得和显示故障信息,且采用闪烁及语音形式播报故障信息,还可显示和播报机器人底层的维护数据信息,可实现较佳的用户体验和较高的生产效率。
54.2.在本发明的机器人运行的控制及监视方法、装置及计算机可读存储介质的一实施例中,每台机器人本体上均装有机器人报警装置,触发报警的机器人会通过机器人报警装置亮灯闪烁,同时通过5g载体将信息传输到数据显示监控模块。相对于io点信息传输,5g载体的数据容量大,可传输信息量大的数据,有利于将故障信息和维护数据信息全面地呈现给操作人员。
55.3.在本发明的机器人运行的控制及监视方法、装置及计算机可读存储介质的一实施例中,可将预维护的信息规范化管理,延长机器人的寿命,节省成本。
56.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。