1.本实用新型属于机器人技术领域,具体涉及一种基于足部压感信号与语音信号共同控制的义肢。
背景技术:
2.人体肢体部位残疾会导致残疾人的日常生活受到极大的不便,上肢残疾会导致残疾人无法很好的适应日常生活,完成日常生活的一些行为,例如常见的拿放,抓握,身体支撑和助力等行为都会受到极大的影响,更有甚者会直接影响人体行走时的身体平衡。现阶段我国上肢残疾患者仍有部分未使用假肢,然而已经安装的假肢大多为装饰性或功能建大的机械式的假肢,智能义肢的出现,对于上肢患有残疾的患者来说是一个补齐缺陷,实现原有正常肢体功能的极好方案,是目前最适合的满足上肢残疾患者实现正常生活的产品。
3.目前市面上常见的义肢主要是外观仿人肢体,内部为连杆机构的机械式义肢,这种义肢可使残疾人在外观上与正常人相仿,且能提供一定的肢体支撑功能,但这种义肢在使用过程中依旧依赖身体其他完好肢体的辅助才能实现简单的身体支撑功能,无法单独实现功能与动作,所以市面上普遍意义上的义肢具有较大的局限性。
技术实现要素:
4.针对上述的现有技术的缺点与不足,本实用新型提供了一种基于足部压感信号与语音信号共同控制的义肢,可实现由残疾患者进行自主控制,且义肢的运动精准可靠。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.一种基于足部压感信号与语音信号共同控制的义肢,包括义肢本体、安装在义肢本体上用于驱动义肢本体的运动执行部分、语音识别模块、足部压感采集模块和主控mcu;
7.所述主控mcu的信号输入端连接所述语音识别模块和足部压感采集模块,所述主控mcu的信号输出端连接所述运动执行部分的信号输入端。
8.进一步的,所述义肢本体包括义肢手指、手指传动连杆、义肢手背、义肢腕部关节、义肢人体连接套和义肢底座;
9.所述义肢人体连接套安装在义肢底座上,所述义肢手背通过义肢腕部关节与所述义肢人体连接套连接,所述义肢腕部关节与运动执行部分连接,所述义肢手指安装在所述义肢手背上并通过手指传动连杆与运动执行部分连接。
10.进一步的,所述运动执行部分包括用于驱动义肢手指运动的手指驱动电机,以及用于驱动手腕运动的手腕关节驱动电机。
11.进一步的,所述手指传动连杆包括第一连杆、第二连杆和第三连杆;
12.第一连杆的一端连接手指驱动电机,另一端与尾部指节通过销轴相连接;第二连杆一端安装于尾部指节前端的滑槽间,另一端连接中间指节的偏心孔于尾部指节末端的滑槽中;第三连杆一端与中间指节的末端偏心孔通过销轴连接,另一端于中间指节的末端通过螺栓将指尖指节的偏心孔连接于中间指节的滑槽中。
13.进一步的,所述义肢人体连接套的前端部分嵌于义肢手背的内部。
14.进一步的,所述义肢底座为圆形。
15.进一步的,所述语音识别模块采用hiwonder系列语音识别模块,通过iic通讯与主控mcu连接。
16.进一步的,所述足部压感采集模块采用柔性薄膜压力传感器,所述柔性薄膜压力传感器安装于鞋垫内部。
17.进一步的,所述主控mcu采用arduino nano微型单片机。
18.进一步的,所述手指驱动电机和手腕关节驱动电机均采用mg995数字舵机。
19.与现有技术相比,本实用新型具有以下技术效果:
20.本实用新型包含语音控制与人工控制两种控制模式,在使用过程中可根据实际需求灵活转换控制模式;该款智能义肢的控制可靠性高,在实际使用过程中可极大的保证使用者的控制自主性,可以在保证使用者自主控制的原则下,精准可靠的完成相应动作,实现相应功能与目的;该款智能义肢的控制系统响应速度快速,控制环节简洁且高效,闭环的控制方式可有效的保证控制的精准性与稳定性;可确保残疾患者在实际使用过程中具有良好的使用体验。
21.下面结合附图和具体实施方式对本实用新型的方案做进一步详细地解释和说明。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
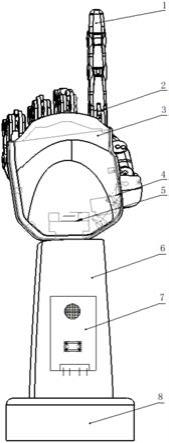
23.图1为本实用新型智能义肢的机械结构示意图;
24.图2为本实用新型智能义肢主控mcu电路原理图;
25.图3为本实用新型智能义肢手指连杆结构图;
26.图4为本实用新型智能义肢腕部电机安装结构图;
27.图5为本实用新型智能义肢控制系统框图;
28.图6为基于语音信号控制义肢的流程图;
29.图7为基于足部压感信号控制义肢的流程图;
30.图中,1为义肢手指;2为手指传动连杆;2-1为第一连杆;2-2为尾部指节;2-3为第二连杆;2-4为第三连杆;2-5为中间指节;2-6为指尖指节;3为义肢手背;4为手指驱动电机;5为义肢腕部关节;5-1为腕部关节驱动电机;5-2为第二驱动电机;6为义肢人体连接套;7为语音识别模块;8为义肢底座。
具体实施方式
31.下面将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
32.以下详细说明均是示例性的说明,旨在对本实用新型提供进一步的详细说明。除非另有指明,本实用新型所采用的所有技术术语与本技术所属领域的一般技术人员的通常理解的含义相同。本实用新型所使用的术语仅是为了描述具体实施方式,而并非意图限制
根据本实用新型的示例性实施方式。
33.本实用新型提供的一种基于足部压感信号与语音信号共同控制的义肢,包括义肢本体、安装在义肢本体上用于驱动义肢本体的运动执行部分、语音识别模块7、足部压感采集模块和主控mcu;主控mcu的信号输入端连接语音识别模块7和足部压感采集模块,主控mcu的信号输出端连接运动执行部分的信号输入端。可实现由残疾患者进行自主控制,且义肢的运动精准可靠。
34.如图1所示,义肢本体包括义肢手指1、手指传动连杆2、义肢手背3、手指驱动电机4、义肢腕部关节5、义肢人体连接套6、语音识别模块7和义肢底座8。
35.义肢手指1由三段结构组成,包括指尖指节2-6、中间指节2-5和2-2尾部指节,关节之间依次通过螺杆螺帽进行连接与固定,且手指关节连接处采用间隙配合,以确保各关节在进行相对转动时保证转动顺滑,且有利与对关节相对运动进行润滑处理。
36.手指传动连杆2,如图3所示,在单根手指上具有三根连杆,第一连杆2-1的一端与手指驱动电机4的舵盘通过螺栓相连接,另一端与尾部指节2-2通过销轴相连接,将舵机旋转运动传递至手指尾部关节;第二连杆2-3一端通过螺栓安装于尾部指节的滑槽间,另一端连接中间指节2-5的偏心孔于尾部指节末端的滑槽中,将尾部指节的运动传导至中间指节,使中间指节于尾部指节末端绕尾部指节末端的中心进行旋转运动,第三连杆2-4一端与中间指节的末端偏心孔通过销轴连接,另一端于中间指节的末端通过螺栓将指尖指节2-6的偏心孔连接于中间指节的滑槽中,将中间指节的运动传导至指尖指节2-6,使指尖指节2-6在中间指节末端绕中间指节的中心孔进行旋转运动;通过三根连杆传动从而实现手指各指节的联动。
37.手指驱动电机4紧密排布并固定于义肢手掌背部之上,采用5个驱动电机,每根手指对应一个驱动电机,传动连杆与驱动电机的转动法兰连接,将电机的运动传导致对应的手指,以实现对义肢手指1的单独精准控制,保证义肢在使用过程中的灵活性。
38.义肢腕部关节5采用仿生设计,如图4所示,使用两个独立的手腕关节驱动电机进行单独控制,腕部关节驱动电机5-1固定于义肢手掌背部3之上,腕部关节驱动电机5-1可使义肢手掌实现手掌的内外旋转运动,义肢手腕的第二驱动电机5-2安装于手掌下部的转动关节处,第二驱动电机5-2可实现义肢手掌的上下翻转运动,为了保证智能义肢在使用过程中具有更好的灵活性,故此增加在腕关节处的两个自由度,以此来极大的还原人体结构以及功能。
39.义肢人体连接套6的内壁采用硅胶材质,以保证使用者将义肢连接到人体上时的紧密性与舒适性,义肢人体连接套6的外壁为pla塑料材质,在保证义肢连接套结构强度的同时也可降低义肢本身的自重;其中义肢腕部关节5的上下翻转部分5-2位于人体连接套6的上端,与义肢人体连接套为一体式结构,连接套的前端部分与义肢手背3的尾部采用螺栓进行连接,如图4所示,其连接位置位于腕部内外翻转电机5-1处的固定凸台处,在该处将手掌与义肢人体连接套6相连接以此形成仿人体肢体的外观形态;且义肢人体连接套6的内壁的硅胶也可保证义肢在使用过程中与人体残肢末端连接的紧密性与稳定性。
40.义肢底座8为圆形外观,使得义肢的外观更为美观,且底座也可使义肢在不使用时的收纳便利,其在义肢与人体残肢末端连接时也可起到导向作用,保证义肢的使用过程中更人性化。
41.作为一种示例,腕部关节驱动电机5-1、第二驱动电机5-2、手指驱动电机4选用mg995数字舵机,该款舵机响应速度快,旋转角度精确,转动扭矩大,其堵转扭矩可达22kg/cm,舵机采用双轴承结构,可有效的防止堵转以及降低噪音,并且具有堵转保护功能,可大幅度提高舵机使用寿命,该款舵机还完全摆脱了舵机抖舵和舵机堵转烧坏的现象。因为该款舵机的优异性能,故选用其作为智能义肢的驱动电机,以实现对智能义肢的精准控制。
42.作为一种示例,语音识别模块选用hiwonder系列语音识别模块,该款语音模块集成了ld3320芯片实现语音识别,板载单片机型号为stc8f1k08s2,该款语音识别模块不需要用户事先训练和录音,只需提前设置候选识别句便可实现对语音信号的识别,且该款语音模块具有三种识别模式:循环识别模式、口令模式以及按键模式,可通过程序编写实现不同识别模式之间的切换,该模块可通过iic通讯与主控mcu进行通讯,其iic通讯地址为0x79。
43.作为一种示例,足部压感采集模块选用柔性薄膜压力传感器以便于安装到鞋垫内部,该款柔性薄膜压力传感器型号为rp-c7.6-lt圆形薄膜压力传感器,其量程范围为20g-6kg,该款柔性薄膜压力传感器由综合机械性能优异的聚脂薄膜、高导电材料和纳米压感材料组成。底层是柔性薄膜和复合其上的导电层,顶层是柔性薄膜和复合其上的压感材料。两者通过双面贴合,并隔离上下层的感应区域。当感应区受压时,底层彼此分离的线路导通,金属端口的输出电阻随着压力不同发生相应变化,以此原理来采集足部的压感信号。
44.作为一种示例,主控mcu选用arduino nano,arduino nano是arduino usb接口的微型单片机,它与arduino其他系列单片机最大的不同是没有电源插座以及usb接口是mini-b型插座。arduino nano的尺寸非常小可以直接插在面包板上或者直接用杜邦线连接其板载引脚使用。其处理器核心是atmega328,同时具有14路数字输入/输出口,8路模拟输入,一个16mhz晶体振荡器,一个mini-b usb口,一个icsp header和一个复位按钮。由于arduino nano体积较小,功能强大,运算速度较快,故选用其作为智能义肢的主控mcu。
45.如下图5~7所示,智能义肢的驱动控制过程,包括以下几个步骤:
46.智能义肢接通电源电后义肢本体上各关节电机进行初始化,运动到各关节的初始位置,关节初始化完成后,智能义肢自动进入语音控制模式,语音识别模块7进入口令聆听状态,实时识别语音指令。
47.当使用者发出“抓取”语音口令时,语音识别模块7实时捕捉语音信号并进行识别,并将识别结果传输至主控mcu,给出相应的pwm信号传输至义肢上的关节电机,驱动各关节进行组合运动,随后义肢本体上安装在各关节上的角位移传感器,以及安装在手指指尖的力传感器和触觉传感器将采集到的信号传输至主控mcu,主控mcu根据收集到的信号来判断义肢的运动结果是否达到预期要求,从而实现义肢抓取动作的实现;
48.当使用者发出“放开”语音口令时,语音识别模块7实时识别语音信号并将识别结果传输至主控mcu,给出相应的pwm信号传输至义肢上的关节电机,通过各关节组合运动,实现义肢张开动作的实现;
49.此外,语音指令还包括各种手势,例如“ok”,“数字1到5”,通过接收语音指令来控制义肢本体完成相应的动作,以满足使用者在不同生活场景下的不同需求。
50.在语音控制模式下,当使用者发出“人工控制”语音指令时,智能义肢进入人工控制模式,即读取使用者的足底压感信号来控制智能义肢上的手指来运动,在足部压感采集模块中,将五个薄膜压力传感器以对应人体脚趾位置排布于鞋垫之上,以此分别读取使用
者五个不同脚趾的不同压力,进而根据不同脚趾控制不同的义肢手掌关节,根据读取到的压力大小来控制手指关节转动的角度大小,使用者可以通过单个脚趾使用不同压力来实现对智能义肢上单个手指的单独控制,也可以通过五个脚趾组合用力来实现对义肢手指1的组合控制,随后义肢本体上安装在各关节上的角位移传感器,以及安装在手指指尖的力传感器和触觉传感器将采集到的信号传输至主控mcu,主控mcu根据收集到的信号来判断义肢的运动结果是否达到预期要求,若不满足预期目的则主控mcu发出信号控制关节电机进行调整,使义肢精准完成各类不同动作以实现义肢功能。
51.在人工控制模式下,语音识别模块7将处于待机状态,当语音模块识别到“语音控制”语音指令时,智能义肢将切换为语音控制状态,继续通过接收使用者的语音信号来实现对智能义肢的控制,使智能义肢完成不同的动作。
52.由技术常识可知,本实用新型可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本实用新型范围内或在等同于本实用新型的范围内的改变均被本实用新型包含。