1.本实用新型涉及除锈清洗设备技术领域,具体涉及具有除锈、吸尘和避障功能的油罐机器人。
背景技术:
2.油罐中的原油抽出后,油罐底部会因腐蚀生锈,现阶段主要采用人工打磨,人工打磨存在的问题如下:底部腐蚀程度不同,铁锈附着力不同,部分铁锈人工很难打磨;单个油罐体积大,油罐数量多,人工打磨效率低,成本高;人工打磨,会有扬尘,需要戴防毒面具,危害人员的身体健康;油罐内部比较黑暗,没有灯光,比较压抑,不适合人员长时间在里面工作;油罐洞口比较小,不适合人员来回进出。
3.中国专利cn112207837a“除锈机器人”提供了一种除锈机器人,包括机体和设于机体上的驱动轮,还包括机械臂、激光除锈装置和收集装置;所述机械臂的一端与机体可转动连接,所述激光除锈装置和收集装置分别设于机械臂的另一端;所述收集装置用于收集激光除锈装置对待清洁表面除锈时产生的粉尘。
技术实现要素:
4.为了解决上述现有技术方案中的不足,本实用新型提供了具有除锈、吸尘和避障功能的油罐机器人。
5.具体技术方案如下:
6.具有除锈、吸尘和避障功能的油罐机器人,包括底盘驱动模块、主体框架、激光避障传感器、扬尘密封模块、吸尘模块、供电模块、除锈模块、交互监控模块,所述扬尘密封模块固定安装在底盘驱动模块下方,所述主体框架固定安装在底盘驱动模块上方,所述吸尘模块、供电模块、除锈模块、交互监控模块均安装在主体框架上;
7.主体框架上设置有控制器和电机驱动器,所述激光避障传感器、吸尘模块、供电模块、除锈模块、交互监控模块均电性连接到控制器,所述控制器有线或无线连接有遥控手柄。
8.进一步地,所述底盘驱动模块包括车身、电机连接件、轮毂电机、双螺母、矩形弹簧、导向轴机构,所述轮毂电机安装在电机连接件上,所述电机连接件通过矩形弹簧与车身连接,所述导向轴机构穿过矩形弹簧,且导向轴机构下端与电机连接件连接,导向轴机构上端通过与双螺母螺纹连接安装到车身上,所述电机连接件、轮毂电机、双螺母、矩形弹簧、导向轴机构均设有四个且对称设置在车身两侧。
9.优选地,所述扬尘密封模块包括u形密封壳体,所述u形密封壳体固定在所述车身底部,所述u形密封壳体底部边缘安装有毛刷。
10.优选地,所述除锈模块包括打磨电机、弹性连接机构、刷盘,所述打磨电机通过电机支架安装在主体框架上,所述弹性连接机构连接打磨电机输出端且穿过车身,所述刷盘与弹性连接机构下端连接且位于u形密封壳体内。
11.优选地,所述吸尘模块包括吸尘电机、电机固定板、滤网密封箱、空气滤网、集尘箱密封条、集尘箱、把手、密封板、吸尘扒,所述吸尘电机通过电机固定板固定安装在滤网密封箱顶部,所述空气滤网设置在滤网密封箱前侧面且同侧滤网密封箱下方设置有集尘箱密封条,所述集尘箱可拆卸的安装在主体框架上且通过肘夹固定,所述密封板设置在滤网密封箱左右两侧,所述集尘箱前侧设有方便集尘箱滑进滑出的把手,所述吸尘扒与集尘箱连接。
12.优选地,所述吸尘扒包括集气壳体、壳体连接件、压缩弹簧、直线轴承、定制轴、吸尘管,所述集气壳体与壳体连接件固定连接,所述压缩弹簧两端分别固定在壳体连接件和直线轴承上,所述定制轴与直线轴承滑动连接且定制轴上端与吸尘管连接,所述定制轴中空,所述吸尘管与集尘箱连通。
13.优选地,所述供电模块包括电池盒、电池定位块,所述电池盒能沿着电池定位块可拆卸的安装到主体框架上,并通过肘夹固定。
14.优选地,所述交互监控模块包括探照灯、工业相机、角度调整件,所述探照灯、工业相机均固定在角度调整件上。
15.优选地,所述激光避障传感器安装在机器人的至少四个方位上。
16.本实用新型的有益效果是:
17.(1)通过肘夹和主体框架的配合设置能实现电池盒与集尘箱的快速更换,一是提高整机续航能力,二是提高整机工作效率;
18.(2)通过具有一定弹性浮动功能的除锈模块和吸尘扒,使得机器人具有一定的越障能力,能够满足油罐底部越障的需求,适用具有一定坡度的油罐底部;
19.(3)通过更换不同刷盘,能适用于不同铁锈的工况,通过多个吸尘电机以及良好的密封性能,具有更好的集尘性能,提高集尘效率;
20.(4)通过激光避障传感器,能够有效保护车体及工作人员;通过相机与探照灯,可以更加容易观察打磨效果。
附图说明
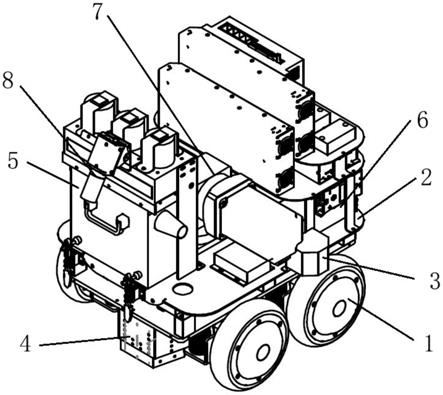
21.图1是本实用新型的整体结构示意图;
22.图2是本实用新型的底盘驱动系统的结构示意图;
23.图3是本实用新型的吸尘模块的结构示意图;
24.图4是本实用新型的吸尘扒的结构示意图;
25.图5是本实用新型的主体框架和供电模块的连接关系示意图;
26.图6是本实用新型的除锈模块的结构示意图;
27.图7是本实用新型的交互监控模块的结构示意图;
28.图中标号,1-底盘驱动模块;11-车身;12-电机连接件;13-轮毂电机;14-双螺母;15-矩形弹簧;2-主体框架;21-肘夹;3-激光避障传感器;4-扬尘密封模块;41-u形密封壳体;5-吸尘模块;51-吸尘电机;52-电机固定板;53-滤网密封箱;54-空气滤网;55-集尘箱密封条;56-集尘箱;57-把手;58-密封板;59-吸尘扒;591-集气壳体;592-壳体连接件;593-压缩弹簧;594-直线轴承;595-定制轴;596-吸尘管;6-供电模块;61-电池盒;62-电池定位块;7-除锈模块;71-打磨电机;72-弹性连接机构;73-刷盘;8-交互监控模块;81-探照灯;82-工业相机;83-角度调整件。
具体实施方式
29.以下说明描述了本实用新型的可选实施方式以教导本领域技术人员如何实施和再现本实用新型。为了教导本实用新型技术方案,已简化或省略了一些常规方面。本领域技术人员应该理解源自这些实施方式的变型或替换将在本实用新型的范围内。本领域技术人员应该理解下述特征能够以各种方式组合以形成本实用新型的多个变型。由此,本实用新型并不局限于下述可实施方式,而仅由权利要求和它们的等同物限定。
30.如图1-7所示,具有除锈、吸尘和避障功能的油罐机器人,包括底盘驱动模块1、主体框架2、激光避障传感器3、扬尘密封模块4、吸尘模块5、供电模块6、除锈模块7、交互监控模块8,所述扬尘密封模块4固定安装在底盘驱动模块1下方,所述主体框架2固定安装在底盘驱动模块1上方,所述吸尘模块5、供电模块6、除锈模块7、交互监控模块8均安装在主体框架2上;
31.主体框架2上设置有控制器和电机驱动器,所述激光避障传感器3、吸尘模块5、供电模块6、除锈模块7、交互监控模块8均电性连接到控制器,所述控制器有线或无线连接有遥控手柄。
32.所述底盘驱动模块1包括车身11、电机连接件12、轮毂电机13、双螺母14、矩形弹簧15、导向轴机构,所述轮毂电机13安装在电机连接件12上,所述电机连接件12通过矩形弹簧15与车身11连接,所述导向轴机构穿过矩形弹簧15,且导向轴机构下端与电机连接件12连接,导向轴机构上端通过与双螺母14螺纹连接安装到车身11上,所述电机连接件12、轮毂电机13、双螺母14、矩形弹簧15、导向轴机构均设有四个且对称设置在车身11两侧。
33.所述扬尘密封模块4包括u形密封壳体41,所述u形密封壳体41固定在所述车身11底部,所述u形密封壳体41底部边缘安装有毛刷。
34.所述除锈模块7包括打磨电机71、弹性连接机构72、刷盘73,所述打磨电机71通过电机支架安装在主体框架2上,所述弹性连接机构72连接打磨电机71输出端且穿过车身11,所述刷盘73与弹性连接机构72下端连接且位于u形密封壳体41内。
35.所述吸尘模块5包括吸尘电机51、电机固定板52、滤网密封箱53、空气滤网54、集尘箱密封条55、集尘箱56、把手57、密封板58、吸尘扒59,所述吸尘电机51通过电机固定板52固定安装在滤网密封箱53顶部,所述空气滤网54设置在滤网密封箱53前侧面且同侧滤网密封箱53下方设置有集尘箱密封条55,所述集尘箱56可拆卸的安装在主体框架2上且通过肘夹21固定,所述密封板58设置在滤网密封箱53左右两侧,所述集尘箱56前侧设有方便集尘箱56滑进滑出的把手57,所述吸尘扒59与集尘箱56连接。
36.所述吸尘扒59包括集气壳体591、壳体连接件592、压缩弹簧593、直线轴承594、定制轴595、吸尘管596,所述集气壳体591与壳体连接件592固定连接,所述压缩弹簧593两端分别固定在壳体连接件592和直线轴承594上,所述定制轴595与直线轴承594滑动连接且定制轴595上端与吸尘管596连接,所述定制轴595中空,所述吸尘管596与集尘箱56连通。
37.所述供电模块6包括电池盒61、电池定位块62,所述电池盒61能沿着电池定位块62可拆卸的安装到主体框架2上,并通过肘夹21固定。
38.所述交互监控模块8包括探照灯81、工业相机82、角度调整件83,所述探照灯81、工业相机82均固定在角度调整件83上。
39.工作原理:通过除锈模块7的打磨电机71带动刷盘73打磨油罐底部的铁锈,由于油
罐底部是由不同金属板叠加焊接而成,故底盘需要具体越障10-30mm的能力,又需要刷盘73紧贴地面,弹性连接机构72的弹力系数需要根据不同的铁锈进行选择,使得弹性连接机构72能够提供压紧力使得刷盘73紧贴地面又不会卡住,刷盘73容易拆卸更换,根据油罐底部生锈程度的不同,可以定制成刷毛高度、密度、硬度等不同的规格,更好得适应不同工况,针对底部生锈程度差别很大的地面,可以快速更换不同规格的刷盘,提高工作效率;打磨下来的铁锈和扬程被扬尘密封模块4内的吸尘模块5吸进集尘箱56内,集成箱46底部安装有压力传感器,可以实时反馈出箱体内部铁锈的重量,当铁锈重量达到预定值时,警报灯进行闪烁,表明集尘箱已满,需进行快换,集尘箱56前方装有把手57,能方便地把集尘箱56抽出进行更换,集尘箱密封条55与密封板58均是为了提高集尘箱56的密封性,吸尘模块5由多个吸尘电机51组成,多个吸尘电机51的优势是可以根据铁锈的颗粒度,重量等选配不同个数的吸尘电机51,增加或者减小吸风压强;吸尘扒59具有一定的浮动功能,集气壳体591主要用于集中吸力、增大压强,定制轴595为中空轴,上方接有吸尘管596,吸尘管596与集尘箱56连通,可以实现吸尘电机51产生的气压,带动地面铁锈通过吸尘扒59与吸尘管596进入集尘箱56。本实用新型采用无线远程控制,通过遥控手柄控制机器人的前进后退以及转弯,同样具有一般机器人所具有的旋钮开关、急停按钮等基本硬件,将不再一一赘述。本实用新型集成一拖四轮毂电机驱动器,便于对底盘运动的整体控制,同时减小了硬件的布置空间,降低了硬件成本;多传感器融合,实现了导航、避障、打磨、吸尘等功能性能的提升;手柄控制时,可通过手柄对行进速度、打磨吸尘速度实现多档位控制,能够更好得适应不同的生锈状态及打磨需求;为了提高整机的续航能力,又由于机器人工作时,本身速度较慢,控制上设定机器人打磨吸尘时,轮毂电机停止运动,此设置可修改;为了便于直观了解和修改机器人运行参数,在显示屏上可以进行轮毂电机速度及打磨吸尘速度的设定。
40.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。