1.本实用新型涉及自动化机械设备技术领域,具体地说是一种新型码垛机械手。
背景技术:
2.随着国家工业的发展,自动化机械设备在工业生产中的角色日渐重要。其中机械手在提高生产效率、节约人力成本上的优势越发突出,从而被越来越多的企业所采用。众多的工业材料中存在很多外形不规则的原材料或者半成品,这些原材料和半成品在加工过程中,使用传统的机械手进行抓取和转移时容易出现抓取不够牢固、在转移过程中出现晃动、稳定性差的问题,从而存在一定的安全隐患。
技术实现要素:
3.为解决上述问题,本实用新型提供了一种新型码垛机械手,对材料的抓取更加牢固,使材料的受力更加稳定均匀,从而避免了材料在移动过程中出现晃动的情况,提高了设备的稳定性和安全性。
4.本实用新型解决其技术问题所采取的技术方案是:一种新型码垛机械手,包括连接架,所述的连接架下端固定连接有驱动箱,所述的驱动箱的内部左侧设置有一号气缸,所述的驱动箱的内部右侧设置有二号气缸;所述的驱动箱底面对称设置有一号滑槽和二号滑槽;所述的一号滑槽内设置有一号竖杆,所述的一号竖杆的上端与一号气缸的输出端固定连接,所述的一号竖杆的下部均匀设置有若干一号横杆,所述的一号横杆末端设置有真空吸盘;所述的二号滑槽内设置有二号竖杆,所述的二号竖杆的上端与二号气缸的输出端固定连接,所述的二号竖杆的下部均匀设置有若干二号横杆,所述的二号横杆末端设置有真空吸盘;所述的真空吸盘的中央位置设置有吸气通道;所述的驱动箱的中央位置设置有三号气缸,所述的三号气缸的输出端穿出驱动箱的底面设置有夹持机构。
5.所述夹持机构包括人字形连接板、一号弧形爪、二号弧形爪;所述人字形连接板的顶端与三号气缸的输出端相铰接;所述的驱动箱的底面与驱动箱前侧面的相交处设置有一号铰接轴,所述的驱动箱的底面与驱动箱后侧面的相交处设置有二号铰接轴,所述的一号铰接轴铰接有一号连接板,所述的二号铰接轴铰接有二号连接板;所述的一号连接板的下部设置有三号铰接轴,所述的二号连接板的下部设置有四号铰接轴,所述的三号铰接轴与人字形连接板的左侧板相铰接,所述的四号铰接轴与人字形连接板的右侧板相铰接;所述的一号连接板的前侧面靠近底部的位置设置有一号弧形爪,所述的二号连接板的后侧面靠近底部的位置设置有二号弧形爪。
6.作为优化,所述的一号弧形爪和二号弧形爪上均布有若干防滑垫,所述的防滑垫为橡胶材料且表面为锯齿状。
7.作为优化,所述的一号横杆和二号横杆为对称设置,所述的一号横杆和二号横杆均设置有镂空部,所述的镂空部内设置有真空发生器,所述的真空发生器与真空吸盘上的吸气通道相连通。
8.作为优化,所述的真空吸盘为波纹形吸盘。
9.与现有技术相比,本实用新型的有益效果是:通过一号弧形爪和二号弧形爪上锯齿状防滑垫的设置,使机械手的抓取更加牢固;通过真空吸盘的设置,可以有效的对表面形状不规则的材料进行吸取;通过一号滑槽和二号滑槽的设置,可以使真空吸盘移动到材料表面最适合吸取的位置。本实用新型大大提高了机械手在应对不规则形状材料的抓取和转移时的安全性和稳定性。
附图说明
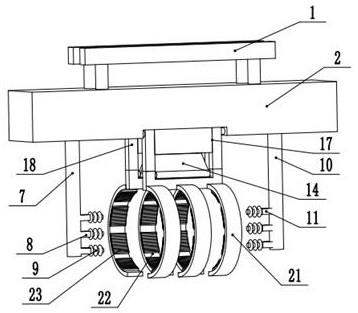
10.图1为本实用新型整体结构示意图。
11.附图2为本实用新型部分结构示意图。
12.附图3为本实用新型的仰视图。
13.附图4为本实用新型a处结构放大示意图。
14.附图5为本实用新型驱动箱内部结构示意图。
15.附图6为本实用新型真空吸盘正视示意图。
16.其中,1连接架、2驱动箱、3一号气缸、4二号气缸、5一号滑槽、6二号滑槽、7一号竖杆、8一号横杆、9真空吸盘、10二号竖杆、11二号横杆、12吸气通道、13三号气缸、14人字形连接板、15一号铰接轴、16二号铰接轴、17一号连接板、18二号连接板、19三号铰接轴、20四号铰接轴、21一号弧形爪、22二号弧形爪、23防滑垫、24镂空部、25真空发生器。
具体实施方式
17.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型说明书附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
18.如图1-3所示实施例中,一种新型码垛机械手,包括连接架1,所述的连接架1下端固定连接有驱动箱2,所述的驱动箱2的内部左侧设置有一号气缸3,所述的驱动箱2的内部右侧设置有二号气缸4;所述的驱动箱2底面对称设置有一号滑槽5和二号滑槽6;所述的一号滑槽5内设置有一号竖杆7,所述的一号竖杆7的上端与一号气缸3的输出端固定连接,所述的一号竖杆7的下部均匀设置有若干一号横杆8,所述的一号横杆8末端设置有真空吸盘9;所述的二号滑槽6内设置有二号竖杆10,所述的二号竖杆10的上端与二号气缸4的输出端固定连接,所述的二号竖杆10的下部均匀设置有若干二号横杆11,所述的二号横杆11末端设置有真空吸盘9;所述的真空吸盘9的中央位置设置有吸气通道12;所述的驱动箱2的中央位置设置有三号气缸13,所述的三号气缸13的输出端穿出驱动箱2的底面设置有夹持机构。一号滑槽5和二号滑槽6的设置可以使真空吸盘9移动到材料表面最适合吸取的位置。
19.所述夹持机构包括人字形连接板14、一号弧形爪21、二号弧形爪22;所述人字形连接板14的顶端与三号气缸13的输出端相铰接;与人字形连接板14的顶端相铰接;所述的驱动箱2的底面与驱动箱2前侧面的相交处设置有一号铰接轴15,所述的驱动箱2的底面与驱动箱2后侧面的相交处设置有二号铰接轴16,所述的一号铰接轴15铰接有一号连接板17,所述的二号铰接轴16铰接有二号连接板18;所述的一号连接板17的下部设置有三号铰接轴19,所述的二号连接板18的下部设置有四号铰接轴20,所述的三号铰接轴19与人字形连接板14的左侧板相铰接,所述的四号铰接轴20与人字形连接板14的右侧板相铰接;所述的一
号连接板17的前侧面靠近底部的位置设置有一号弧形爪21,所述的二号连接板18的后侧面靠近底部的位置设置有二号弧形爪22。由三号气缸13的输出端来控制一号弧形爪21和二号弧形爪22的开合。
20.所述的一号横杆8和二号横杆11为对称设置,所述的一号弧形爪21和二号弧形爪22上均布有若干防滑垫23,所述的防滑垫23为橡胶材料且表面为锯齿状。锯齿状防滑垫23的设置,使抓取更加牢固。
21.如图4所示,所述的一号横杆8和二号横杆11均设置有镂空部24,所述的镂空部24内设置有真空发生器25,所述的真空发生器25与真空吸盘9上的吸气通道12相连通,所述的真空吸盘9为波纹形吸盘。镂空部24的设置减轻了设备自重。
22.使用时,当三号气缸13的输出端伸出时,一号弧形爪21和二号弧形爪22张开,容纳材料规则部分的主体;三号气缸13的输出端收回时,一号弧形爪21和二号弧形爪22闭合,将材料规则部分的主体抓紧;一号弧形爪21和二号弧形爪22上锯齿状防滑垫23的设置,使抓取更加牢固。然后由一号气缸3控制一号竖杆7在一号滑槽5内移动,由二号气缸4控制二号竖杆10在二号滑槽6内移动,从而带动真空吸盘9移动,可以使真空吸盘9移动到材料表面最适合吸取的位置;真空吸盘9移动到位后,真空发生器25开始工作,使真空吸盘9对材料表面产生吸力,对材料的不规则处进行吸取。本实用新型在传统机械手的基础上,增加了锯齿状防滑垫23和可移动的真空吸盘9,从而提高了机械手在抓取和转移不规则形状材料时的安全性和稳定性。
23.上述具体实施方式仅是本实用新型的具体个案,本实用新型的专利保护范围包括但不限于上述具体实施方式的产品形态和式样,任何符合本实用新型权利要求书的一种新型码垛机械手且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本实用新型的专利保护范围。