1.本实用新型涉及内镜运输技术领域,具体为一种医用内镜智能转运的新能源机器人。
背景技术:
2.内镜是集中了传统光学、人体工程学、精密机械、现代电子、数学、软件等于一体的检测仪器。一个具有图像传感器、光学镜头、光源照明、机械装置等,它可以经口腔进入胃内或经其他天然孔道进入体内。利用内窥镜可以看到x射线不能显示的病变,因此它对医生具有极大的作用。
3.在医院内对内镜进行转运时,一般都是运用托盘装载,然后人工搬运,有的使用手推车进行运输,这些方式不仅费时费力,劳动成本大,且容易发生意外,比如人与人的无意碰撞,导致内镜的损坏而造成损失;走廊人员较多,容易造成多次污染等问题。
4.针对上述问题,本实用新型提出了一种医用内镜智能转运的新能源机器人。
技术实现要素:
5.本实用新型的目的在于提供一种医用内镜智能转运的新能源机器人,控制中心电连接用于发出控制信号的信号发出模块,信号发出模块电连接用于接收控制信号的信号接收模块,信号接收模块电连接用于储存路线的储存模块,储存模块电连接用于寻找储存路线的记忆模块,记忆模块电连接用于探测障碍物的探测模块,探测模块电连接用于判断障碍物距离的判断模块,判断模块电连接用于发出警报提示工作人员的警报模块,机体的上端安装有plc控制器,其下端还安装有万向轮,机体的内壁活动连接有托盘,托盘的两侧固定连接有活动件,机体的内壁安装有上螺杆,上螺杆的下端固定连接有下螺杆,其上端固定连接有电机,电机电连接plc控制器,盘体的上端安装有等离子空气消毒装置,等离子空气消毒装置的一端连通出气孔,出气孔开设在盘体的内壁,盘体的内壁活动连接有两组夹紧板,夹紧板的一端固定连接有内杆,内杆的外表面贯穿连接有复位弹簧,复位弹簧的一端固定连接有外杆,内杆与外杆的内腔活动连接,从而解决了背景技术中的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种医用内镜智能转运的新能源机器人,包括机体,以及安装在机体上端的微电脑控制终端,所述微电脑控制终端包括控制中心,控制中心电连接用于发出控制信号的信号发出模块,信号发出模块电连接用于接收控制信号的信号接收模块,信号接收模块电连接用于储存路线的储存模块,储存模块电连接用于寻找储存路线的记忆模块;
7.所述记忆模块电连接用于探测障碍物的探测模块,探测模块电连接用于判断障碍物距离的判断模块,判断模块电连接用于发出警报提示工作人员的警报模块。
8.优选的,所述机体的上端安装有plc控制器,其下端还安装有万向轮,机体的内壁活动连接有托盘,托盘的两侧固定连接有活动件。
9.优选的,所述机体的内壁安装有上螺杆,上螺杆的下端固定连接有下螺杆,其上端
固定连接有电机,电机电连接plc控制器。
10.优选的,所述上螺杆和下螺杆均设有两组,且两组的上螺杆和下螺杆均关于机体的中心对称分布。
11.优选的,所述上螺杆和下螺杆为反螺纹结构,且均螺纹贯穿连接活动件。
12.优选的,所述托盘设置有至少两组,均活动连接在机体的内壁。
13.优选的,所述托盘包括盘体,盘体的上端安装有等离子空气消毒装置,等离子空气消毒装置的一端连通出气孔,出气孔开设在盘体的内壁。
14.优选的,所述盘体的内壁活动连接有两组夹紧板,夹紧板的一端固定连接有内杆,内杆的外表面贯穿连接有复位弹簧,复位弹簧的一端固定连接有外杆,内杆与外杆的内腔活动连接。
15.与现有技术相比,本实用新型的有益效果如下:
16.1、本实用新型提出的一种医用内镜智能转运的新能源机器人,控制中心电连接用于发出控制信号的信号发出模块,信号发出模块电连接用于接收控制信号的信号接收模块,信号接收模块电连接用于储存路线的储存模块,储存模块电连接用于寻找储存路线的记忆模块,记忆模块电连接用于探测障碍物的探测模块,探测模块电连接用于判断障碍物距离的判断模块,判断模块电连接用于发出警报提示工作人员的警报模块,工作人员利用遥控通过信号发出模块与信号接收模块的配合,可控制机器人的移动路线,机器人通过储存模块可将移动路线进行储存,当机器人独自转运内镜时,通过记忆模块可寻找储存的路线,根据储存的路线进行移动,在移动过程中,可通过探测模块对路径的障碍物进行探测,探测到障碍物后,通过判断模块判断障碍物的距离,如距离大于10cm,则继续移动,如距离小于10cm,就会触发警报模块提示工作人员,工作人员将障碍物挪走后,可继续移动,劳动成本小,省时省力,不易发生意外。
17.2、本实用新型提出的一种医用内镜智能转运的新能源机器人,机体的上端安装有plc控制器,其下端还安装有万向轮,机体的内壁活动连接有托盘,托盘的两侧固定连接有活动件,机体的内壁安装有上螺杆,上螺杆的下端固定连接有下螺杆,其上端固定连接有电机,电机电连接plc控制器,上螺杆和下螺杆均设有两组,且两组的上螺杆和下螺杆均关于机体的中心对称分布,上螺杆和下螺杆为反螺纹结构,且均螺纹贯穿连接活动件,托盘设置有至少两组,均活动连接在机体的内壁,工作人员通过微电脑控制终端上的按钮可触发plc控制器,通过plc控制器启动电机,电机带动上螺杆与下螺杆转动,因上螺杆和下螺杆为反螺纹结构,使得分别分布在上螺杆和下螺杆的多组托盘,通过活动件会互相远离或靠近,实现托盘自动升降的目的,工作人员可根据实际需求进行相应的调节,实用性好。
18.3、本实用新型提出的一种医用内镜智能转运的新能源机器人,盘体的上端安装有等离子空气消毒装置,等离子空气消毒装置的一端连通出气孔,出气孔开设在盘体的内壁,盘体的内壁活动连接有两组夹紧板,夹紧板的一端固定连接有内杆,内杆的外表面贯穿连接有复位弹簧,复位弹簧的一端固定连接有外杆,内杆与外杆的内腔活动连接,在将内镜放置在盘体上端后,两组夹紧板会通过复位弹簧给予内杆的反作用力夹紧内镜,移动时不易甩出,且等离子空气消毒装置内会储存等离子消毒气体,在移动时,等离子消毒气体会通过出气孔排出,时刻对内镜进行消毒,安全性高。
附图说明
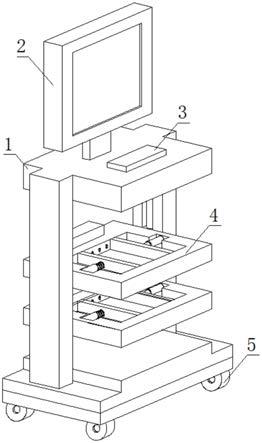
19.图1为本实用新型的整体结构示意图;
20.图2为本实用新型的微电脑控制终端内部架构图;
21.图3为本实用新型的机体与托盘连接状态结构示意图;
22.图4为本实用新型的托盘结构示意图。
23.图中:1、机体;2、微电脑控制终端;21、控制中心;22、信号发出模块;23、信号接收模块;24、储存模块;25、记忆模块;26、探测模块;27、判断模块;28、警报模块;3、plc控制器;4、托盘;41、盘体;42、等离子空气消毒装置;43、出气孔;44、夹紧板;45、内杆;46、复位弹簧;47、外杆;5、万向轮;6、活动件;7、上螺杆;8、下螺杆;9、电机。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1-2,一种医用内镜智能转运的新能源机器人,包括机体1,以及安装在机体1上端的微电脑控制终端2,微电脑控制终端2包括控制中心21,控制中心21电连接用于发出控制信号的信号发出模块22,信号发出模块22电连接用于接收控制信号的信号接收模块23,信号接收模块23电连接用于储存路线的储存模块24,储存模块24电连接用于寻找储存路线的记忆模块25,记忆模块25电连接用于探测障碍物的探测模块26,探测模块26电连接用于判断障碍物距离的判断模块27,判断模块27电连接用于发出警报提示工作人员的警报模块28。
26.工作人员利用遥控通过信号发出模块22与信号接收模块23的配合,可控制机器人的移动路线,机器人通过储存模块24可将移动路线进行储存,当机器人独自转运内镜时,通过记忆模块25可寻找储存的路线,根据储存的路线进行移动,在移动过程中,可通过探测模块26对路径的障碍物进行探测,探测到障碍物后,通过判断模块27判断障碍物的距离,如距离大于10cm,则继续移动,如距离小于10cm,就会触发警报模块28提示工作人员,工作人员将障碍物挪走后,可继续移动,劳动成本小,省时省力,不易发生意外。
27.请参阅图3-4,机体1的上端安装有plc控制器3,其下端还安装有万向轮5,机体1的内壁活动连接有托盘4,托盘4的两侧固定连接有活动件6,机体1的内壁安装有上螺杆7,上螺杆7的下端固定连接有下螺杆8,其上端固定连接有电机9,电机9电连接plc控制器3,上螺杆7和下螺杆8均设有两组,且两组的上螺杆7和下螺杆8均关于机体1的中心对称分布,上螺杆7和下螺杆8为反螺纹结构,且均螺纹贯穿连接活动件6,托盘4设置有至少两组,均活动连接在机体1的内壁,工作人员通过微电脑控制终端2上的按钮可触发plc控制器3,通过plc控制器3启动电机9,电机9带动上螺杆7与下螺杆8转动,因上螺杆7和下螺杆8为反螺纹结构,使得分别分布在上螺杆7和下螺杆8的多组托盘4,通过活动件6会互相远离或靠近,实现托盘4自动升降的目的,工作人员可根据实际需求进行相应的调节,实用性好。
28.托盘4包括盘体41,盘体41的上端安装有等离子空气消毒装置42,等离子空气消毒装置42的一端连通出气孔43,出气孔43开设在盘体41的内壁,盘体41的内壁活动连接有两
组夹紧板44,夹紧板44的一端固定连接有内杆45,内杆45的外表面贯穿连接有复位弹簧46,复位弹簧46的一端固定连接有外杆47,内杆45与外杆47的内腔活动连接,在将内镜放置在盘体41上端后,两组夹紧板44会通过复位弹簧46给予内杆45的反作用力夹紧内镜,移动时不易甩出,且等离子空气消毒装置42内会储存等离子消毒气体,在移动时,等离子消毒气体会通过出气孔43排出,时刻对内镜进行消毒,安全性高,内镜直接放在机体内部的托盘上,通过等离子空气消毒装置的消毒,可以保证内镜无污染,如果要用内镜的话,是可以直接拿出来使用的。
29.工作原理:工作人员利用遥控通过信号发出模块22与信号接收模块23的配合,可控制机器人的移动路线,机器人通过储存模块24可将移动路线进行储存,当机器人独自转运内镜时,通过记忆模块25可寻找储存的路线,根据储存的路线进行移动,在移动过程中,可通过探测模块26对路径的障碍物进行探测,探测到障碍物后,通过判断模块27判断障碍物的距离,如距离大于10cm,则继续移动,如距离小于10cm,就会触发警报模块28提示工作人员,工作人员将障碍物挪走后,可继续移动,工作人员通过微电脑控制终端2上的按钮可触发plc控制器3,通过plc控制器3启动电机9,电机9带动上螺杆7与下螺杆8转动,因上螺杆7和下螺杆8为反螺纹结构,使得分别分布在上螺杆7和下螺杆8的多组托盘4,通过活动件6会互相远离或靠近,实现托盘4自动升降的目的,
30.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。