1.本实用新型涉及卡钳技术领域,尤其涉及一种手持式弹簧卡箍电动夹钳。
背景技术:
2.在汽车、农机生产加工过程中,比如汽车发动机的油路软管、冷却水路软管上需要用到以弹簧卡箍为主的卡箍进行安装固定,当弹簧卡箍安装到位后,常规的方式为采用手动夹钳进行夹紧实现二次固定。
3.但是手动夹钳的操作十分不便,需要工人有很高的操作技巧和熟练度才能实现单手控制,在操作过程中工人需要注意力量的控制,避免夹紧力过大或者过小,夹紧力过小会导致卡箍安装不到位,夹紧力过大会导致卡箍结构受到破坏。
技术实现要素:
4.本实用新型的目的是提供一种手持式弹簧卡箍电动夹钳,具有操作简单、安全可靠、夹紧稳定、施力均匀的特点。
5.本实用新型是通过以下技术方案得以实现的:
6.一种手持式弹簧卡箍电动夹钳,包括一体设置的端壳和外壳、设置于端壳内的夹紧机构、设置于外壳内的传动机构和驱动机构;夹紧机构包括两相对设置的夹紧臂且两夹紧臂均铰接连接于端壳内,两夹紧臂的自由端均可拆卸设置有夹紧块,两夹紧臂之间安设有复位弹簧;传动机构包括滑移于外壳内部的导向套,导向套一端可拆卸设置有锥头顶块且锥头顶块的锥面同时抵靠于两夹紧臂端部;驱动机构包括置于外壳内的驱动电机和减速器,减速器传动连接有传动丝杠,传动丝杠螺纹贯穿导向套。
7.通过采用上述技术方案,驱动电机通过减速机驱动传动丝杠转动,传动丝杠推动导向套在外壳内部前进/后退,导向套前进时其端部的锥头顶块推动两个夹紧臂同时匀速转动,两个夹紧块相互靠拢从而对弹簧卡箍实现夹紧安装,导向套后退时,通过复位弹簧的弹力使得两个夹紧臂复位。本实用新型操作简单,手持便携,各个部件可更换,通用性高,两个夹紧臂施力均匀、速度稳定,夹紧力可控制,安全可靠。
8.进一步设置为:夹紧臂远离外壳的一端开设有阶梯槽,阶梯槽底部开设有贯穿夹紧臂端部的螺纹孔,夹紧块一侧固设有与螺纹孔配合的定位柱。
9.通过采用上述技术方案,夹紧块可安装在阶梯槽处并且通过定位柱进行定位,防止其夹紧时晃动,通过可拆卸设置方便对受损的夹紧块进行更换。
10.进一步设置为:定位柱周侧套设有垫片。
11.通过采用上述技术方案,垫片可防止夹紧块松动使用过程中的松动。
12.进一步设置为:两夹紧臂的相对面均开设有安置口,复位弹簧的两端分别卡入至两安置口内。
13.通过采用上述技术方案,自然状态下,复位弹簧的弹力迫使两个夹紧臂张开,复位弹簧卡在安置口内,安置口对复位弹簧实现了有效固定。
14.进一步设置为:导向套的端部一体设置有连接块,锥头顶块底部开设有安装孔,连接块可插入至安装孔。
15.通过采用上述技术方案,锥头顶块插接安装在导向套的顶部,方便更换。
16.进一步设置为:外壳内部固设有隔板且隔板抵靠于导向套的外壁。
17.通过采用上述技术方案,隔板用于限制导向套相对于外壳发生转动,并同时保证导向套在外壳内部相对滑移的稳定。
18.进一步设置为:外壳远离端壳的一端设置有控制线插头或者内置电源。
19.通过采用上述技术方案,驱动电机的供电方式采用外接或者内置两种,可根据使用环境进行选择。
20.进一步设置为:外壳外壁设置有控制驱动电机启停的操作按钮和检查电源状态的电源指示灯。
21.通过采用上述技术方案,操作按钮方便控制电动夹钳启停,电源指示灯方便观察电动夹钳的工作状态。
22.进一步设置为:端壳的两侧均设置有限位螺栓。
23.通过采用上述技术方案,两个限位螺栓可以控制两夹紧臂的开合角度,起到保护作用。
24.综上所述,本实用新型的有益技术效果为:
25.(1)本实用新型操作过程总可有效降低劳动强度,符合人体工程学,适合手持、吊装等各种工况;
26.(2)本实用新型的各个部件可拆装更换,通用性高,可根据实际情况需求进行部件更换;(3)本实用新型的两个夹紧臂施力均匀、速度稳定,夹紧力可控制,相较于传统手工卡钳更加安全可靠。
附图说明
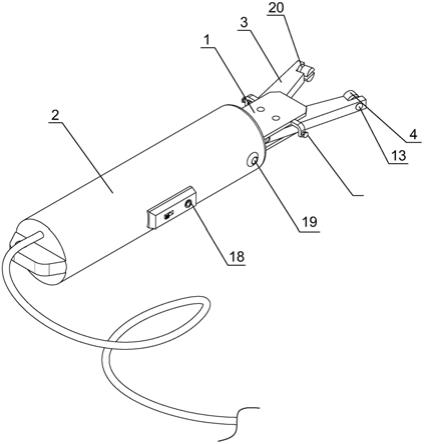
27.图1是本实用新型的整体结构示意图;
28.图2是本实用新型的剖视图。
29.附图标记:1、端壳;2、外壳;3、夹紧臂;4、夹紧块;5、复位弹簧;6、导向套;7、锥头顶块;8、驱动电机;9、减速器;10、传动丝杠;11、阶梯槽;12、螺纹孔;13、定位柱;14、安置口;15、连接块;16、安装孔;17、隔板;18、操作按钮;19、电源指示灯;20、垫片;21、限位螺栓。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
31.参照图1,为本实用新型公开的一种手持式弹簧卡箍电动夹钳,包括一体设置的端壳1和外壳2,外壳2呈长筒状且内部中空,外壳2远离端壳1的一端设有吊装点,端壳1呈双夹板状。端壳1内设置有用于夹紧弹簧卡箍的夹紧机构,外壳2内设置有用于提供动力的驱动机构和用于驱动夹紧机构运动的传动机构。
32.参照图1和图2,夹紧机构包括两相对设置的夹紧臂3,两夹紧臂3均铰接连接于端壳1内,夹紧臂3靠近外壳2一端的三分之一处设置有铰接点。两夹紧臂3的自由端均可拆卸
设置有夹紧块4,两个夹紧块4相对设置。通过夹紧块4直接对弹簧卡箍实现夹紧。夹紧臂3远离外壳2的一端开设有阶梯槽11,夹紧块4安设于阶梯槽11内,阶梯槽11底部开设有贯穿夹紧臂3端部的螺纹孔12,夹紧块4一侧固定有定位柱13,定位柱13穿过螺纹孔12且与螺纹孔12螺纹连接,定位柱13周侧套设有垫片20,垫片20呈环状且位于夹紧块4和夹紧臂3之间。夹紧块4可安装在阶梯槽11处并且通过定位柱13进行定位,防止其夹紧时晃动,通过可拆卸设置方便对受损的夹紧块4进行更换,也可以根据产品型号的不同进行更换,垫片20同时可防止夹紧块4松动使用过程中的松动。本实施例中,夹紧块4安装到位后不会转动和偏移,其表面具备有防滑纹路或者防滑槽。端壳1的两侧均设置有限位螺栓21,两限位螺栓21位于两夹紧臂3外侧。通过两个限位螺栓21可以控制两夹紧臂3的开合角度,对夹紧臂3起到保护作用。
33.参照图2,两夹紧臂3的相对面均开设有安置口14,两夹紧臂3之间还设置有复位弹簧5,复位弹簧5的两端分别伸入至两个安置口14内。电动夹钳在自然状态下,复位弹簧5的弹力迫使两个夹紧臂3张开,复位弹簧5卡在安置口14内,安置口14对复位弹簧5实现了有效固定。
34.传动机构包括导向套6,导向套6沿外壳2中心轴线方向滑移于外壳2内部,导向套6呈长方体状,外壳2内壁固定有隔板17,隔板17抵靠于导向套6的外壁。通过隔板17引导导向套6的滑移方向,避免导向套6滑移过程中相对于外壳2发生转动。
35.导向套6一端可拆卸设置有锥头顶块7,锥头顶块7的锥面同时抵靠于两夹紧臂3的端面;导向套6朝向端壳1的端部固定有连接块15,锥头顶块7底部开设有安装孔16,连接块15可插入至安装孔16,锥头顶块7插接安装在导向套6的顶部,方便更换。
36.驱动机构包括驱动电机8,驱动电机8为直流电机,驱动电机8可拆卸安装在外壳2内部,驱动电机8的驱动端传动连接有减速器9,减速器9采用齿轮减速,减速器9传动连接有传动丝杠10,传动丝杠10的轴线与外壳2的轴线相互重合,传动丝杠10螺纹贯穿导向套6远离锥头顶块7的一端。驱动电机8启动后,通过减速器9带动传动丝杠10转动,从而带动导向套6的前进后退。外壳2远离端壳1的一端设置有控制线插头或者内置电源,控制线插头或者内置电源为驱动电机8提供电力输出。驱动电机8的供电方式采用外接或者内置两种,可根据使用环境进行选择。
37.参照图1,外壳2外壁设置有控制驱动电机8启停的操作按钮18和检查电源状态的电源指示灯19。操作按钮18方便控制电动夹钳启停,从而控制电动夹钳的夹紧力,电源指示灯19方便观察电动夹钳的工作状态,电源指示灯19点亮后,启动操作按钮18实施操作。外壳2内部设置有控制器,控制器与驱动电机8直接控制连接并且可任意控制驱动电机8的启停和加速/减速,从而使得夹紧臂3任意位置停留。极大的提高了其可操作性。
38.本实施例中,端壳1内设置有测试夹紧臂3夹持力的扭矩传感器,扭矩传感器与控制器信号连接,通过控制器的显示屏进行扭矩显示。方便工人阅读电动夹钳的夹紧力数值,也间接测量卡箍的抱紧力。
39.本实用新型的工作原理及有益效果为:
40.手持电动夹钳使用过程中,驱动电机8启动并通过减速机带动传动丝杠10转动,传动丝杠10推动导向套6在外壳2内部前进,导向套6前进时其端部的锥头顶块7推动两个夹紧臂3同时匀速转动,两个夹紧块4相互靠拢从而对弹簧卡箍实现夹紧安装;当夹紧安装结束
后,驱动电机8反向转动,导向套6后退,通过复位弹簧5的弹力使得两个夹紧臂3复位。
41.本实用新型的操作简单,有效降低了工人操作过程中的劳动强度,符合人体工程学,适合手持、吊装等各种工况;同时,各个部件可更换,通用性高,可根据实际情况进行部件更换;使用过程中,两个夹紧臂3施力均匀、速度稳定,夹紧力可控制,使得弹簧卡箍等产品的安装质量得到质的飞跃,安全可靠。
42.以上所述,仅为本实用新型较佳的具体实施方式,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。