1.本发明涉及颈椎治疗设备领域,具体为一种用于颈椎脱位的自动牵引装置。
背景技术:
2.颈椎脱位作为临床上常见的颈椎损伤,一般是由外力导致颈椎双侧关节突关节脱位或颈椎系列异常,主要临床表现为头颈部疼痛、活动受限、神经损伤、瘫痪等症状。颈椎脱位好发于中、老年人,第五颈椎到第六颈椎最常见,其次为第六颈椎到第七颈椎。因此迅速恢复椎体序列和椎管有效容积,缩短脊髓受压时间,为神经功能的恢复创造有利条件显得十分重要。
3.目前,采用轴向颅骨牵引复位被认为是一种较为安全可靠和简单有效的治疗方法。目前临床上采用的肩部固定式颅骨牵引装置的方法是:先用一定起始重量牵引患者头部,一定时间后拍片透视观察颈椎复位情况,若未能复位则继续增加一定的牵引重量,反复重复操作,直至重量达到最大牵引重量,若未复位,则行手术治疗。而现有的牵引治疗方式存在如下缺陷:
4.1.在牵引治疗过程中,调节牵引重量、控制牵引时间等操作均需要医护人员现场手动进行,而为保持牵引效果,避免患者出现危险,常需要医护人员频繁操作或长时间在场,耗费大量医护人员大量的时间和精力,且易出现人工操作失误、调整不及时的情况,因此一些患者的神经功能在此期间中因脊髓继发性损伤加重,甚至危及生命。
5.2.现有的牵引治疗方式中,调节牵引重量为跳跃式增重,使得颈椎和肌肉突然受力增大,不利于颈部肌肉放松和颈椎蠕变,且牵引重量有可能超过临界值导致过度牵张损伤;且牵引量没有长度限制,易在牵引到目标程度后继续牵引,存在韧带断裂以及脊髓牵张损伤风险。
6.3.现有的牵引装置需要较大的支撑架,一般需要在具有辅助支撑结构的病床上使用,而无法在手术室、抢救室或康复室等病床上使用,使用区域的局限性较大。
技术实现要素:
7.本发明的目的是针对上述背景技术中存在的问题,提供一种用于颈椎脱位的自动牵引装置,可预设牵引重量和牵引时间,以及预设在各个时段的不同牵引重量,根据患者的具体病况预设针对化的牵引治疗方案,且能够实现颅骨牵引动作和肩部抵住动作的同时进行,牵引重力无级变化,牵引长度被始终限制在安全长度内,避免出现牵引效果不佳、牵引中产生二次伤害等问题。
8.为了实现上述发明目的,本发明采用了以下技术方案:
9.一种用于颈椎脱位的自动牵引装置,包括机身、颈椎牵引机构和用于抵住肩膀上方的肩部撑抵机构,所述机身通过紧定机构可拆卸地安装于病床的床头部位,所述机身内部设有驱动机构和连动机构,所述驱动机构通过所述连动机构控制所述颈椎牵引机构和肩部撑抵机构的运动,所述颈椎牵引机构和肩部撑抵机构通过所述连动机构建立如下连动关
系:在同一时刻,所述颈椎牵引机构和肩部撑抵机构分别以相反的方向运动,或存在相反的运动趋势,
10.所述机身还集成设有用于控制所述驱动机构的智能控制模块和用于输入控制信号的人机交互模块。
11.与现有技术相比,采用了上述技术方案的用于颈椎脱位的自动牵引装置具有如下有益效果:
12.一、在牵引治疗时,需要在抵住两侧肩部的同时,对头部进行反向的牵拉,在本方案中,颈椎牵引机构和肩部撑抵机构处存在连动关系,可分别以相反的方向同时运动,根据相对运动原理,颈椎牵引机构仅需行进较短的距离便可以达到所需的牵引量,可以降低驱动机构的消耗量;在相对运动距离不变的前提下,颈椎牵引机构和肩部撑抵机构的实际运动距离减小,在机身结构上,可以缩减颈椎牵引机构或肩部撑抵机构运动所需的空间,从而使得机身更加小型化,便于转运和安装。
13.二、医护人员通过人机交互模块可以预先输入牵引重量和牵引时间,还可以在一次牵引治疗中,预设各个时段的牵引重量以及某个牵引重量的保持时间,甚至可以实现无医护人员情况下的动态化牵引,即预设牵引重量的增重速率或减重速率,使得牵引重量持续性增大或减小,在现有技术的支持下,上述功能均可实现,医护人员只需进行预设工作,便可以实现自动牵引治疗,无需医护人员长时间在场或频繁操作牵引装置,减轻医护人员的工作量和工作难度,且可以避免人工操作易出错、精确性低的缺陷。
14.优选的,颈椎牵引机构包括牵引绳和用于固定头部的固定带;所述肩部撑抵机构包括两个分别用于抵住左肩和右肩的抵杆,所述抵杆由传动部和延伸部构成,所述传动部与机身滑动连接且由机身内部向外伸出连接所述延伸部,所述传动部表面设有沿传动部轴向设置的锯齿面;所述连动机构包括轴杆、卷轮和设于所述轴杆两端部的齿轮,所述轴杆通过传动组件连接驱动机构,所述牵引绳远离固定带的一端卷设于所述卷轮上,轴杆两端部的齿轮分别与两个抵杆的锯齿面相啮合。
15.轴杆以某一时针方向旋转时,通过齿轮传动作用,两个抵杆可同时朝向肩部推进或逐渐脱离和远离肩部,在抵杆朝向肩部外推进的同时,卷设于卷轮上的牵引绳继续被收卷,使得头部被牵拉继而继续增大牵拉重量;而在抵杆远离肩部的同时,卷设于卷轮上的牵引绳逐渐展开,使得牵拉重量逐渐减小直至牵引绳完全松弛,对两侧肩膀的抵住固定与对头部的牵引动作通过共同的轴杆旋转而实现,无需增设其他传动结构,有利于增加传动的同步性和结构的简洁化。
16.优选的,传动部贯穿设置有限位槽,所述机身内部设有两个限位凸板,两个限位凸板分别内嵌于两个抵杆的限位槽中,且限位凸板和限位槽内壁在垂直于抵杆滑动方向的方向上不留缝隙,限位凸板在限位槽中具有固定的运动空间,可以对牵引长度进行限制,避免牵引绳在牵引到目标程度后继续牵引,避免牵引过度导致的韧带断裂以及脊髓牵张损伤风险。
17.优选的,机身侧壁设有用于所述牵引绳通过的通孔,所述机身外侧还设有牵引导向机构,所述牵引导向机构包括第一导向杆、第二导向杆、导向节和滑动调节件,所述导向节设有导向孔,所述第一导向杆和第二导向杆共同旋转连接至所述导向节两端,所述第一导向杆远离所述导向节的一端与机身旋转连接,所述第二导向杆远离所述导向节的一端与
所述滑动调节件旋转连接,所述滑动调节件与机身在竖直方向上滑动连接,且滑动调节件可锁紧固定在机身上,所述牵引绳由卷轮经所述通孔伸出继而穿过所述导向孔连接固定带。
18.通过滑动调节件在竖直方向上的滑动,可以调节导向节的高度,从而调节牵引绳的拉伸角度,第一导向杆、第二导向杆形成且始终维持三角支撑结构,具有较好的稳定性,保证牵引绳在牵引过程中始终轴向运动,避免发生偏摆。
19.优选的,驱动机构采用伺服电机,所述传动组件包括主动轮、被动轮和传动带,主动轮和被动轮通过所述传动带连接,所述主动轮连接伺服电机的输出轴,所述被动轮与轴杆同轴心固定连接,所述主动轮直径为所述被动轮直径的1/5~1/2。
20.伺服电机的转速范围一般为1r/min~3000r/min,而较为常用的、比较经济性的电机一般难以达到足够低的转速,易导致牵引绳突然被拉紧,使患者产生较强的痛感,甚至导致颈椎被二次伤害,不利于颈部肌肉放松和颈椎蠕变,而采用小轮带动大轮的方式,可以多倍得减小轴杆的转速,使得牵引绳收卷速度处于较为缓慢的状态,以解决上述问题。
21.优选的,智能控制模块包括有内置于所述机身内部的控制电路板,所述人机交互模块包括有设于所述机身表面的输入面板和显示面板,方便医护人员设置和调整牵引重量和时间,也便于获取当前的拉伸情况信息。
22.优选的,人机交互模块还包括有用于控制牵引力度的手动控制器,所述手动控制器与所述机身相对独立设置,且手动控制器与所述控制电路板通过有线或无线技术建立信号传输关系,在牵引治疗中,手动控制器可以放置于患者本人能够触及的位置,患者可以遵医嘱以自己调节牵引重量或启动关闭牵引功能,即使医生不在场,患者也可以自己及时做出应对,以避免牵引过度等安全问题的发生。
23.优选的,手动控制器为扁平板状,所述手动控制器表面设有紧急按钮,扁平板状的手动控制器可以比较稳定的放置在患者手边的病床上,当出现紧急状况时,如牵引力度过大导致患者产生难以忍受的痛苦,患者可以容易得触发紧急按钮,使得牵引装置关闭复位,避免发生危险。
24.本发明除公开了上述技术方案之外,还公开了如下的技术方案:
25.在本方案中,肩部撑抵机构包括两个传动滑杆,两个传动滑杆分别配备有若干规格不同的左肩部抵杆和右肩部抵杆,所述驱动机构通过所述连动机构控制所述传动滑杆在机身内部滑动,所述传动滑杆由机身内部向外伸出,且在传动滑杆的伸出端设有锁定连接结构,若干左肩部抵杆以及若干右肩部抵杆均可通过所述锁定连接结构分别与两个传动滑杆可拆卸连接。
26.优选的,左肩部抵杆与传动滑杆的连接端逐渐向外弯折延伸形成第一外扩部,所述右肩部抵杆与传动滑杆的连接端逐渐向外弯折延伸形成第二外扩部,所述第一外扩部与第二外扩部的外扩方向相反;左肩部抵杆和右肩部抵杆均根据外扩程度的不同分为多个规格。
27.设置多个规格不同的左肩部抵杆和右肩部抵杆,可以根据患者体型的差异选择安装合适规格的左肩部抵杆和右肩部抵杆,提高左肩部抵杆和右肩部抵杆与患者肩膀的贴合度,避免抵住肩膀的位置太靠外导致的固定不稳,或抵住肩膀的位置太靠内导致的过度挤压斜方肌;此外,在未使用时,还可以将向外延伸较长的左肩部抵杆和右肩部抵杆拆下,方
便收纳与转运。
附图说明
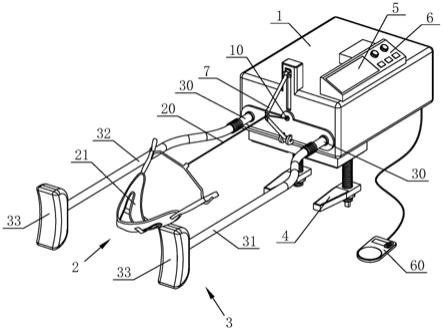
28.图1为本发明用于颈椎脱位的自动牵引装置实施例1的结构示意图。
29.图2为实施例1中牵引导向机构的结构示意图。
30.图3为实施例1的俯视图。
31.图4为实施例1的侧视图。
32.图5和图6为实施例1中机身的内部结构示意图。
33.图7为实施例1中伺服电机、传动滑杆以及牵引绳之间的连动关系示意图。
34.图8为实施例2的结构示意图。
35.附图标记:1、机身;10、通孔;11、滑动孔;12、限位凸板;2、颈椎牵引机构;20、牵引绳;21、固定带;22、颅骨牵引器;3、肩部撑抵机构;30、传动滑杆;300、锯齿面;301、限位槽;302、锁定连接结构;31、左肩部抵杆;32、右肩部抵杆;33、肩托;4、紧定机构;5、输入面板;6、显示面板;60、手动控制器;600、紧急按钮;7、牵引导向机构;70、导向节;700、导向孔;71、第一导向杆;72、第二导向杆;8、伺服电机;9、连动机构;90、轴杆;91、卷轮;92、齿轮;93、传动组件;930、主动轮;931、被动轮;932、传动带。
具体实施方式
36.下面结合附图对本发明做进一步描述。
37.实施例1:
38.如图1至图7所示的用于颈椎脱位的自动牵引装置,包括机身1、颈椎牵引机构2和用于抵住肩膀上方的肩部撑抵机构3,机身1通过紧定机构4可拆卸地安装于病床的床头部位,机身1内部设有驱动机构和连动机构9,驱动机构通过连动机构9控制颈椎牵引机构2和肩部撑抵机构3的运动,机身1还集成设有用于控制驱动机构的智能控制模块和用于输入控制信号的人机交互模块,智能控制模块为内置于机身1内部的控制电路板,人机交互模块包括有设于机身1表面的输入面板5、显示面板6和手动控制器60。
39.颈椎牵引机构2包括牵引绳20和用于固定头部的固定带21,机身1侧壁设有用于牵引绳20通过的通孔10,机身1外侧还设有牵引导向机构7,牵引导向机构7与通孔10位于机身1的同一侧壁,牵引导向机构7包括第一导向杆71、第二导向杆72、导向节70和滑动调节件,导向节70设有导向孔700,第一导向杆71和第二导向杆72共同旋转连接至导向节70两端,第一导向杆71远离导向节70的一端与机身1旋转连接,第二导向杆72远离导向节70的一端与滑动调节件旋转连接,滑动调节件与机身1在竖直方向上滑动连接,且滑动调节件可锁紧固定在机身1上。
40.肩部撑抵机构3包括两个传动滑杆30,两个传动滑杆30分别配备有若干规格不同的左肩部抵杆31和右肩部抵杆32,传动滑杆30为圆柱形杆,传动滑杆30表面设有沿传动滑杆30轴向设置的锯齿面300,机身1侧壁设有两个滑动孔11,两个滑动孔11均设置于通孔10所在的机身1侧壁,两个滑动孔11的轴心位于同一水平面上,且两个滑动孔11关于通孔10对称设置,两个传动滑杆30分别穿过两个滑动孔11由机身1内部向外伸出,在传动滑杆30的伸出端设有锁定连接结构302,若干左肩部抵杆31以及若干右肩部抵杆32均可通过锁定连接
结构302分别与两个传动滑杆30可拆卸连接。
41.传动滑杆30贯穿设置有限位槽301,机身1内部设有两个限位凸板12,两个限位凸板12分别内嵌于两个抵杆的限位槽301中,且限位凸板12和限位槽301内壁在垂直于抵杆滑动方向的方向上不留缝隙,限位凸板12在限位槽301中具有固定的运动空间,可以对牵引长度进行限制。
42.左肩部抵杆31与传动滑杆30的连接端逐渐向外弯折延伸形成第一外扩部,第一外扩部的轴心平行于其所连接的传动滑杆30的轴心,第一外扩部端部固定设置有肩托33;右肩部抵杆32与传动滑杆30的连接端逐渐向外弯折延伸形成第二外扩部,第二外扩部的轴心平行于其所连接的传动滑杆30的轴心,第二外扩部端部也固定设置有肩托33,第一外扩部与第二外扩部的外扩方向相反,左肩部抵杆31和右肩部抵杆32均根据外扩程度的不同分为多个规格。
43.连动机构9包括轴杆90、卷轮91和设于轴杆90两端部的齿轮92,轴杆90通过传动组件93连接驱动机构,牵引绳20远离固定带21的一端卷设于卷轮91上,轴杆90两端部的齿轮92分别与两个传动滑杆30的锯齿面300相啮合,驱动机构采用伺服电机8,传动组件93包括主动轮930、被动轮931和传动带932,主动轮930和被动轮931通过传动带932连接,主动轮930连接伺服电机8的输出轴,被动轮931与轴杆90同轴心固定连接,主动轮930直径为被动轮931直径的1/4,牵引绳20由卷轮91经通孔10伸出继而穿过导向孔700连接固定带21。
44.通过设于机身1表面的输入面板5医护人员可以设置和调整牵引重量和时间,通过显示面板6获取当前的拉伸情况信息,手动控制器60与机身1相对独立设置,且手动控制器60与控制电路板通过有线或无线技术建立信号传输关系,在牵引治疗中,手动控制器60可以放置于患者本人能够触及的位置,患者可以遵医嘱以自己调节牵引重量或启动关闭牵引功能,手动控制器60为扁平板状,手动控制器60表面设有紧急按钮600,扁平板状的手动控制器60可以比较稳定的放置在患者手边的病床上,当出现紧急状况时,如牵引力度过大导致患者产生难以忍受的痛苦,患者可以容易得触发紧急按钮600,使得牵引装置关闭复位。
45.实施例2:
46.如图8所示,本实施例基于实施例1的技术方案,本实施例与实施例1的区别技术点为:
47.在颈椎牵引机构2中,将固定带21替换为颅骨牵引器22,颅骨牵引器22连接牵引绳20。
48.以上所述是本发明的优选实施方式,对于本领域的普通技术人员来说不脱离本发明原理的前提下,还可以做出若干变型和改进,这些也应视为本发明的保护范围。