1.本发明涉及一种骨科手术的医疗器械,尤其涉及适用于将多种髓内钉植入患者的骨髓腔中并瞄准髓内钉的螺钉孔的髓内钉瞄准器以及包括其的骨骼治疗系统。
背景技术:
2.髓内钉固定技术是治疗大的长骨骨折的手术技术之一。这种技术具有相对微创,出血少,并发症少,可以早期活动等优点。但是由于骨髓腔形状的不规则,单一形状的髓内钉植入到骨髓腔内后会被迫挤压变形,尤其是会在前弓弯折起始位置处发生倾斜,从而导致远端螺钉孔的位置发生变化,并且由于无法定位远端螺钉孔的位置,从而导致远端锁定螺钉的植入非常困难,造成手术时间延长,射线使用增加,甚至手术失败的风险。
3.现有最接近的髓内钉瞄准器系统技术为术中调整技术。
4.术中调整技术即在手术过程中,辅助利用x射线成像,不断地微调导套的位置,使导套与植入物上的钉孔对齐。调整机构分为两种,一种是滑动机构,另一种为旋转机构。现有的滑动机构的运动方式与植入物实际产生的变形差别较大,在髓内钉植入后很容易产生较大的轴向偏差。现有的旋转机构的旋转中心的位置会因植入物的长度变化而变化,从而导致即使通过旋转也无法使瞄准孔的位置与植入后发生倾斜的髓内钉的远端螺钉孔的位置相同,也就是说同样会产生较大的轴向偏差。此外,为完成髓内钉植入手术,需要将髓内钉的近端和远端螺钉全部植入。为完成此过程,现有技术需要首先将髓内钉与手柄连接,然后连接近端瞄准器,在完成近端螺钉植入后取下近端瞄准器再次组装远端瞄准器的多个组件。这一系列繁琐的过程无疑增加了手术难度,增加术中出错的风险,延长手术时间,对医生的要求也更为严格。
5.因此,本领域亟需一种能够简单便捷的完成髓内钉植入手术并且可准确瞄准钉孔的髓内钉瞄准器。
技术实现要素:
6.为了解决上述现有技术中的问题,本发明提出了一种髓内钉瞄准器,所述髓内钉瞄准器适用于多种髓内钉,并且包括:
7.手柄,其具有外端部和内端部,其中所述内端部适合于结合从所述多种髓内钉中选出的任一髓内钉;
8.连接装置,其包括主体,其中所述主体被固定至所述外端部;以及
9.瞄准臂,其设有多个远端瞄准孔,其中所述瞄准臂在与所述髓内钉相对应的位置处可旋转地耦合至所述主体,其中,所述主体将所述瞄准臂定位成使得,在所述髓内钉被结合于所述内端部的状态下,所述多个远端瞄准孔对准所述髓内钉的多个远端螺钉孔,并且所述瞄准臂的旋转轴线指向所述髓内钉的前弓弯折起始位置。
10.可选地,所述瞄准臂还设有与所述多种髓内钉相对应的多个近端连接孔。
11.可选地,所述连接装置还包括从所述主体突出的定位轴,其中,所述定位轴插入与
所述髓内钉相对应的一个近端连接孔中。
12.可选地,所述连接装置还包括可旋转地结合至所述主体的驱动组件,所述驱动组件与所述瞄准臂耦合,以便将所述驱动组件的旋转转化为所述瞄准臂的旋转。
13.可选地,所述驱动组件包括枢转轴以及相对于所述枢转轴偏心地设置的偏心轴,其中,所述枢转轴被可旋转并可滑动地耦合至所述主体中的接收孔中,所述偏心轴被可旋转地耦合至一个近端连接孔中。
14.可选地,所述驱动组件还包括锁定装置,所述锁定装置适合于在锁定位置和释放位置之间切换,在所述锁定位置中,所述锁定装置压靠在所述主体上,从而将所述驱动组件相对于所述主体固定;在所述释放位置中,所述锁定装置脱离所述主体,从而使得所述驱动组件能够相对于所述主体旋转。
15.可选地,所述驱动组件还包括可旋转并且可滑动地耦合至所述偏心轴的紧固杆,所述紧固杆适合于在锁定位置和释放位置之间切换,在所述释放位置中,所述紧固杆处于所述偏心轴的延伸方向上,从而使得所述瞄准臂能够跨过所述紧固杆脱离所述偏心轴;在所述锁定位置中,所述紧固杆与所述偏心轴呈t字形结构,以便阻挡所述瞄准臂脱离所述偏心轴。
16.可选地,所述主体还设有围绕所述驱动组件的旋转轴线设置的一组角度刻度线,并且所述驱动组件还包括被配置成指向所述角度刻度线的指针。
17.可选地,所述驱动组件还包括阻尼装置,所述阻尼装置包括被从其内部弹性地偏压出来从而抵靠所述主体的顶头。
18.同样为了解决上述现有技术中的问题,本发明还提出了一种骨骼治疗系统,其包括如上所述的髓内钉瞄准器以及所述髓内钉瞄准器所适用的髓内钉。
19.本发明可以体现为附图中的示意性实施方式。然而,应注意的是,附图仅仅是示意性的,任何在本发明的教导下所设想到的变化都应被视为包括在本发明的范围内,并且本发明的范围仅仅通过所附权利要求来限定。
附图说明
20.附图示出了本发明的示例性实施方式。这些附图不应被解释为必然地限制本发明的范围。通篇相同的数字和/或类似的附图标记可指相同和/或类似的元件。在各个附图中:
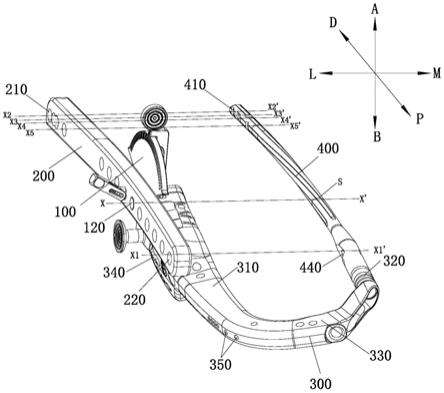
21.图1是根据本发明的处于组装状态的髓内钉瞄准器以及骨骼治疗系统的示意性立体图;
22.图2是根据本发明的处于分解状态的髓内钉瞄准器以及骨骼治疗系统的示意性立体图;
23.图3是根据本发明的髓内钉瞄准器的处于组装状态的连接装置的示意性立体图;
24.图4是根据本发明的髓内钉瞄准器的处于分解状态的连接装置的示意性立体图;
25.图5a是根据本发明的髓内钉瞄准器的处于释放位置的连接装置的示意性立体图;
26.图5b是根据本发明的髓内钉瞄准器的处于锁定位置的连接装置的示意性立体图;
27.图6是图3-5b中示出的连接装置的驱动组件的枢转轴和偏心轴的示意性局部侧视图;以及
28.图7是髓内钉在植入后发生倾斜以及现有技术的瞄准机构的操作的示意图。
具体实施方式
29.现在参考附图更详细地描述本发明,附图中示出了本发明的示例性实施方式。然而,本发明可以实现为许多不同的形式并且不应解释为必然地限制于这里示出公开的示例性实施方式。相反,这些示例性实施方式仅仅被提供用于说明本发明以及向本领域的技术人员传递本发明的理念。
30.如本文中所使用的那样,参考人体以及本文所述的旨在植入人体的部件,术语“近端p”和“远端d”是相对于植入手术时患者的躯干来定义的,其中,术语“近端p”是较靠近心脏位置的一端,术语“远端d”是较远离心脏位置的一端,在此基础上,术语“近端p”与术语“远端d”共同限定了远近方向dp;术语“内端m”和术语“外端l”是相对于患者的矢状平面来定义的,其中,术语“内端m”是指较靠近矢状平面的一侧,术语“外端l”是指较远离矢状平面的一侧,在此基础上,术语“内端m”和术语“外端l”共同限定了内外方向ml;术语“上方a”和术语“下方b”是相对于患者的方位来定义的,其中术语“上方a”是指患者平躺时所面向的方向,术语“下方b”是指患者平躺时所背对的方向,在此基础上,术语“上方a”和术语“下方b”共同限定了上下方向ab。在上述定义中,“矢状平面”是穿过身体或身体结构的中间的假想竖直平面,其将身体或身体结构分成左右两半。然而,值得注意的是,上述关于相对方位的定义仅仅是出于通过附图更好地说明本发明的技术方案的目的而给出的,其不应以任何方式解释成是对本发明的保护范围的限制。
31.参考图1-图6,根据本发明的一个方面,提供了一种髓内钉瞄准器,其大体包括连接装置100以及通过连接装置100相连接的瞄准臂200和手柄300。接下来对各个组成部件进行详细描述。
32.下面参考图1描述本髓内钉瞄准器的手柄300。如图1所示,手柄300总体呈u形,在图中所示的情况下,其u形结构的开口面向远端方向d。手柄300包括沿着内外方向ml分开的外端部310和内端部320以及将外端部310与内端部320相连接的握持部330,其中,外端部310用于接合连接装置100,内端部320用于接合待植入的髓内钉400,并且握持部330用于接合操作人员(例如,外科医生)的手。
33.可选地,手柄300的外端部310上设有呈通孔形式的一个或多个近端瞄准孔340,当待植入的髓内钉400被(例如,通过螺纹连接、卡扣配合、摩擦配合等)固定于内端部320上时,所述近端瞄准孔340对准髓内钉400中的近端螺钉孔440,所谓“对准”是指近端瞄准孔340与近端螺钉孔440同轴,如图1中的参考轴线x1-x1’所示,由此,当髓内钉400被植入患者体内(例如,植入患者骨折的股骨中)后,可以将导套插入近端瞄准孔340中并使导套向着近端螺钉孔440延伸,此时导套、近端瞄准孔340以及近端螺钉孔440三者同轴,由此,近端骨螺钉可以在导套中向着近端螺钉孔440行进并最终穿过近端螺钉孔440旋拧至骨骼(例如,股骨)中,从而在髓内钉400的近端处将其固定在患者体内。因此,在进行髓内钉近端固定时,可以直接利用手柄300上的近端瞄准孔340来引导导套和近端骨螺钉。然而,在现有技术中,需要先将近端瞄准装置固定至手柄,然后再利用近端瞄准装置上的瞄准孔引导导套和近端骨螺钉以便进行髓内钉近端固定,并且在完成髓内钉近端固定之后,还需要将近端瞄准装置拆下,然后将远端瞄准装置固定至手柄,进而再利用远端瞄准装置的瞄准孔引导导套和远端骨螺钉以进行髓内钉远端固定。因此,现有技术中的瞄准装置使用起来繁琐费时,与之相比,本发明的髓内钉瞄准器使用起来简单方便,不需要反复拆装,这极大地节省了手术时
间,减轻了外科医生的负担以及患者的痛苦。
34.特别地,如图1和图2所示,手柄300的外端部310上还设有导针孔350。由此,可以将导针引入导针孔350中,以便在手术中使用x射线设备时为x射线设备提供参考,从而确保手术能够更加顺利地进行。
35.接下来,参考图1和图2描述本髓内钉瞄准器的瞄准臂200。如图1和图2所示,瞄准臂200总体呈沿着远近方向dp延伸的柱形形状。瞄准臂200在其远端处具有呈通孔形式的远端瞄准孔210(图中示出了四个),其中,远端瞄准孔210用于对准髓内钉400中的远端螺钉孔410。进一步地,当医生根据术前和/或术中规划为患者选定待植入的髓内钉400后,将瞄准臂200在与该选定的髓内钉400相对应的位置处可旋转地耦合至连接装置100,以使得在髓内钉400被固定至手柄300的内端部320之后,各个远端瞄准孔210能够对准相应的远端螺钉孔410,如图1中的参考轴线x2-x2’、x3-x3’、x4-x4’以及x5-x5’所示。
36.特别地,如图1和图2所示,瞄准臂200设有多个沿着其长度方向分布的近端连接孔220,其中,每个近端连接孔220对应于一种髓内钉400并且如下文进一步所述的那样,被配置成供连接装置100的定位轴120插入,以便相对于髓内钉400定位瞄准臂200。因此,当医生根据术前和/或术中规划为患者选定待植入的髓内钉400后,将瞄准臂200在与该选定的髓内钉400相对应的近端连接孔220处耦合至连接装置100,以使得在髓内钉400被固定至手柄300的内端部320之后,各个远端瞄准孔210能够对准相应的远端螺钉孔410。另外,之所以设置多个近端连接孔220是为了使本髓内钉瞄准器能够配合多种髓内钉,也就是说,多个近端连接孔220对应于多种不同尺寸(具体地,沿着远近方向dp的尺寸不同)的髓内钉,如上所述,每个近端连接孔220对应于一种尺寸的髓内钉。值得注意的是,虽然图中示出了10个近端连接孔220,但是在其他实施方式中,近端连接孔220的数量可以根据可选的髓内钉类型来变化,例如,如果有n种可选的髓内钉,那么可以设置n个近端连接孔220。因此,其中设置了任意数量的近端连接孔220的实施方式都应被认为是处于本发明的教导下,并因此包括在本发明的范围中。
37.可选地,瞄准臂200关于一沿着其长度方向(图中所示的远近方向dp)延伸的假想平面ip(图2中示出)对称。由此,瞄准臂200既可以应用于患者左侧肢体髓内钉植入手术,也可以应用于患者右侧肢体髓内钉植入手术。特别地,在瞄准臂200的处于该假想平面ip两侧的外表面上设有代表其应用于左侧肢体植入手术还是右侧肢体植入手术的符号“l”和“r”,并且这两个符号可以被设置成,当瞄准臂200用于左侧肢体植入手术时,符号“l”面向操作人员;当瞄准臂200用于右侧肢体植入手术时,符号“r”面向操作人员。由于这种符号的设置,可以帮助操作人员快速、准确地确定瞄准臂的设置方向,并因此能够确保植入手术顺利地进行。
38.接下来,参考图1-图4描述连接装置100。如图所示,连接装置100包括主体110,如图1-图2所示,所述主体110被配置成固定至手柄300的外端部310。例如,可以通过螺纹连接、卡扣连接等可拆卸的连接方式将主体110固定至手柄300的外端部310。特别地,主体110设有至少两个端部带有开口的销钉111,其中,每个销钉111的端部被其开口分隔成多个瓣,当将销钉111插入外端部310中的相应接收孔311中时,销钉111的端部处的多个瓣因受到接收孔311的孔壁的挤压而彼此靠近,然而由于弹性回复力的作用,所述多个瓣趋向于彼此分开,因此弹性回复力将多个瓣压靠到孔壁上,从而使得销钉111被牢固地保持在相应的接收
孔311中。由此,可以以简单的插拔方式将主体110固定至外端部310以及将其从外端部310上拆下,这极大地简化了本髓内钉瞄准器的装配过程。
39.可选地,当医生选定短规格的髓内钉作为待植入的髓内钉时,所述接收孔311还可以被配置成在这种短规格的髓内钉被结合至手柄300的内端部320时指向该髓内钉的远端螺钉孔。以这种方式,当髓内钉400较短从而不需要瞄准臂200来瞄准其远端螺钉孔410时,可以利用手柄300上的接收孔311来瞄准髓内钉400的远端螺钉孔410。以这种方式,本髓内钉瞄准器可适用于较广范围内的多种髓内钉400。
40.可选地,如图1-图4所示,连接装置100还包括从主体110突出的定位轴120,其中,所述定位轴120被配置成插入瞄准臂200的多个近端连接孔220中的与待植入的髓内钉400相对应的一个近端连接孔220中,通过定位轴120与近端连接孔220的配合,瞄准臂200以能够围绕定位轴120旋转(换言之,定位轴120限定瞄准臂200的旋转轴线xx’)的方式结合至主体110,并且由于该近端连接孔220与待植入的髓内钉400相对应,因此,如上所述,在髓内钉400被固定至近端部320时,瞄准臂200的远端瞄准孔210能够对准髓内钉400的远端螺钉孔410。
41.可选地,如图1-图4所示,连接装置100还包括可旋转并且可滑动地地结合至主体110的驱动组件130,所述驱动组件130与瞄准臂200耦合,以便将所述驱动组件130的旋转转化为瞄准臂200的旋转。进一步地,驱动组件130包括枢转轴131以及相对于枢转轴131偏心地设置的偏心轴132,其中,所述枢转轴131被配置成可旋转并且可滑动地耦合至主体110中的接收孔112中,由此,驱动组件130以能够围绕枢转轴131的枢转轴轴线y1-y1’旋转并且可沿着与枢转轴轴线y1-y1’垂直的径向方向zz’(图4是示出)滑动的方式结合至主体110。特别地,所述枢转轴131呈圆柱形状,所述接收孔112呈长条孔形状,其具有以等于枢转轴131的直径的距离分开的一对相对的平坦侧壁,这对平坦侧壁限定了所述径向方向zz’,以这种方式,枢转轴131以可旋转并且可沿着这对平坦侧壁滑动的方式耦合至接收孔112中。所述偏心轴132被配置成可旋转地耦合至瞄准臂200的多个近端连接孔220中的一个近端连接孔220中,由此,偏心轴132围绕枢转轴131的旋转能够被转化为瞄准臂200围绕其旋转轴线xx’的旋转。具体地,如图4-图6所示,由于偏心轴132被相对于枢转轴131偏心地设置,也就是说,偏心轴132的偏心轴轴线y2-y2’与枢转轴131的枢转轴轴线y1-y1’平行但彼此分开,因此,当旋转驱动组件130时,偏心轴132将随着枢转轴131的自转而围绕枢转轴131旋转,由此,偏心轴132相对于枢转轴131、进一步地相对于定位轴120的在上下方向ab上的位置将随着该旋转而发生变化,因此,接收了偏心轴132的近端连接孔220的相对于定位轴120的在上下方向ab上的位置将随着驱动组件130的旋转而发生变化,进一步地由于与髓内钉400相对应的近端连接孔220被固定在定位轴120上,因此,上述接收了偏心轴132的近端连接孔220的相对于定位轴120的在上下方向ab上的位置变化将表现为瞄准臂200围绕定位轴120的旋转。综上所述,当驱动组件130被旋转时,偏心轴132将驱动瞄准臂200旋转。
42.可选地,如图1至图4所示,驱动组件130还包括从枢转轴131径向延伸的拨杆133,其中拨杆133用于接合操作人员(例如,外科医生)的手,以使得操作人员能够通过推拉拨杆133来旋转驱动组件130。为了在将驱动组件130旋转到期望位置(例如使得瞄准臂200的远端瞄准孔210对准髓内钉400的远端螺钉孔410的位置)后将其锁定就位,驱动组件130还包括锁定装置134,在图中所示的示例中,所述锁定装置134被设置在拨杆133的径向自由端部
上。其中,锁定装置134例如与拨杆133螺纹连接,以便通过相对于拨杆133旋转而在锁定位置和释放位置之间切换,在所述锁定位置(例如通过朝向主体110旋拧锁定装置134而实现)中,锁定装置134压靠在主体110上从而在二者之间产生较大的摩擦力,该摩擦力将驱动组件130相对于主体110固定;在所述释放位置(例如通过远离主体110旋拧锁定装置134而实现)中,锁定装置134脱离主体110,从而使得驱动组件130能够相对于主体110旋转。
43.可选地,如图1-图4所示,为了确定驱动组件130的旋转角度,主体110上还设有围绕接收孔112,换言之,围绕驱动组件130的旋转轴线(即,枢转轴131的枢转轴轴线y1-y1’)设置的一组角度刻度线113,并且驱动组件130还包括被配置成指向所述角度刻度线113的指针135,在图中所述的情况下,指针135被设置在拨杆133的径向自由端部上。因此,通过指针135与角度刻度线113的配合,操作人员可以方便地知晓驱动组件130的旋转角度,这使得植入手术能够更加方便顺利地进行。
44.可选地,如图4所示,为了更稳定地旋转驱动组件130,例如以便防止意外地将驱动组件130旋转过大角度,所述驱动组件130还包括阻尼装置136,所述阻尼装置136包括被从其内部弹性地偏压出来从而抵靠所述主体110的顶头136a。由于顶头136a的存在,操作人员必须克服因施加在顶头136a上的弹性偏压力而在顶头136a与主体110之间产生的摩擦力才能旋转驱动组件130,这有助于更稳定地旋转驱动组件130。在图中所述的情况下,阻尼装置136被设置在拨杆133的径向自由端部处,这有利于阻尼装置136针对驱动组件130的旋转产生更大的阻尼。进一步地,所述主体110上设有围绕接收孔112,换言之,围绕驱动组件130的旋转轴线(即,枢转轴131的枢转轴轴线y1-y1’)分布的一组定位凹槽(未示出),所述定位凹槽被配置成接收顶头136a,也就是说,顶头136a被配置成部分地延伸至所述定位凹槽之一中。以这种方式,操作人员必须向驱动组件130施加足以致使顶头136a离开定位凹槽的力才能旋转驱动组件130,这有助于阻尼装置136针对驱动组件130的旋转产生更大的阻尼,从而更加可靠、更加平稳地调整驱动组件130。
45.可选地,如图1-图5b所示,为了将瞄准臂200与驱动组件130可靠地耦合并防止二者意外脱离,所述驱动组件130还包括可旋转并且可滑动地耦合至偏心轴132的紧固杆137,所述紧固杆137适合于通过旋转和滑动而呈现锁定位置和释放位置,在所述释放位置(如图5a所示)中,紧固杆137处于偏心轴132的延伸方向上,从而使得瞄准臂200能够跨过紧固杆137脱离偏心轴132;而在所述锁定位置(如图5b所示)中,紧固杆137与偏心轴132呈t字形结构,以便阻挡瞄准臂200从而防止瞄准臂200脱离偏心轴132。在图中所示的情况中,所述紧固杆137设有沿着其高度(长度)方向延伸的狭槽137a,所述偏心轴132设有沿着与其轴线y2-y2’垂直的方向突出的轴杆132a,其中轴杆132a被接收在狭槽137a中,并且轴杆132a可相对于狭槽137a旋转并可沿着狭槽137a滑动,由此使得紧固杆137被可旋转并且可滑动地耦合至偏心轴132。进一步地,可将紧固杆137围绕轴杆132a旋转成处于偏心轴132的延伸方向上或横向于偏心轴132的延伸方向,当横向于偏心轴132的延伸方向时,可进一步将紧固杆137相对于轴杆132a滑动,以使得紧固杆137的两个端部137b、137c均与偏心轴132间隔开,从而使得紧固杆137与偏心轴132整体呈t字形。特别地,所述狭槽137a被配置成相对于紧固杆137的轴线倾斜,这使得随着紧固杆137横向于偏心轴132的轴线y2-y2’滑动,紧固杆137与主体110(换言之,与偏心轴132的朝向主体110的端部)之间的距离发生变化,当该距离减小时,紧固杆137不仅阻止瞄准臂200离开偏心轴132而且还将瞄准臂200牢固地夹持在
偏心轴132上。以这种方式,通过旋转和滑动紧固杆137即可方便地紧固和释放瞄准臂200,这进一步减轻了操作人员的负担,并保证手术能够更加顺利地进行。
46.可选地,为了使操作人员能够更方便地抓握连接装置100,连接装置100还设有固定至主体110的把手140。
47.进一步地,如图1所示,在待植入的髓内钉400被安装至手柄300的内端部320之后,连接装置100(更具体地,定位轴120)将瞄准臂200定位成使其旋转轴线xx’指向或者穿过髓内钉400的前弓弯折起始位置s。众所周知,骨髓腔一般存在自然倾斜,因此髓内钉400在植入骨髓腔后也会发生倾斜,而所谓前弓弯折起始位置s顾名思义就是指髓内钉400在植入骨髓腔后倾斜发生的起始位置,换言之,髓内钉400在植入骨髓腔后将围绕其前弓弯折起始位置s发生倾斜,由于旋转轴线xx’穿过该前弓弯折起始位置s,因此髓内钉400在植入骨髓腔后可以例如通过围绕远近方向dp旋转髓内钉瞄准器而使得髓内钉400围绕旋转轴线xx’倾斜。为了在髓内钉400上限定该前弓弯折起始位置s,例如可以在髓内钉400上加工出窄化部分,例如局部减小髓内钉直径的部分等等,以这种方式,可以使得多种髓内钉400具有相同的前弓弯折起始位置s,即,多种髓内钉400的近端与其前弓弯折起始位置s之间的距离大致相同。进一步地,由于瞄准臂200在与该待植入的髓内钉400相对应的位置(例如,近端连接孔220)处耦合至连接装置100,因此,在髓内钉400被固定至内端部320但未植入骨髓腔的状态下,瞄准臂200的远端瞄准孔210能够对准髓内钉400的远端螺钉孔410。然而,如上所述,在植入骨髓腔后,髓内钉400可以围绕旋转轴线xx’发生倾斜,此时,可以(例如,通过旋转驱动组件130)使瞄准臂200同样围绕旋转轴线xx’旋转,这使得在旋转一定角度后瞄准臂200的远端瞄准孔210能够再次对准髓内钉400的远端螺钉孔410,而不会像如下所述的现有技术中那样在远端瞄准孔210和远端螺钉孔410之间产生轴向偏差。以上虽然针对从本髓内钉瞄准器所适用的多种髓内钉中选出的一个髓内钉描述了本髓内钉瞄准器的布置,但是可以理解的是,针对任一从所述多种髓内钉中选出的髓内钉,上述布置都适用。也就是说,对于从所述多种髓内钉中选出的任何一个髓内钉,在该髓内钉和连接装置100被安装至手柄300并且瞄准臂200在与该髓内钉相对应的位置处耦合至连接装置100之后,瞄准臂200的远端瞄准孔210在髓内钉植入之前能够对准该髓内钉的远端螺钉孔;进一步地,由于连接装置100将瞄准臂200的旋转轴线xx’定位成指向(或者说穿过)该髓内钉的前弓弯折起始位置,因此在髓内钉植入并在前弓弯折起始位置处发生倾斜之后,瞄准臂200仍能在旋转一定角度之后使其远端瞄准孔210再次对准该髓内钉的远端螺钉孔。也就是说,根据上述技术方案,无论是髓内钉植入之前还是植入之后,瞄准臂的远端瞄准孔都能够对准髓内钉的远端螺钉孔。
48.通过上述技术方案,在医生例如通过术前和/或术中规划为遭遇骨折、骨裂等的患者选定一个髓内钉400之后,可以根据该髓内钉400来组装本髓内钉瞄准器,并将该髓内钉400安装在本髓内钉瞄准器上。可选地,髓内钉400也可以在本髓内钉瞄准器组装完成之前安装。此时,根据上述技术方案,在组装完成后,瞄准臂200的旋转轴线xx’指向或穿过髓内钉400的前弓弯折起始位置s,并且瞄准臂200的远端瞄准孔210能够对准髓内钉400的远端螺钉孔410。然而,由前文可知,参考图7中的虚线部分,髓内钉400在植入患者体内(例如股骨的骨髓腔内)后,由于骨髓腔的天然倾斜,髓内钉400会在前弓弯折起始位置s处发生倾斜,从而导致多个远端螺钉孔410的位置发生改变。当将髓内钉400植入患者的骨髓腔中时,
可以将患者的方位调整成使得和/或将髓内钉瞄准器围绕远近方向旋转成使得,髓内钉400在植入患者体内后在前弓弯折起始位置s处围绕瞄准臂200的旋转轴线xx’倾斜。在这种情况下,由于瞄准臂200的远端瞄准孔210在髓内钉400未植入时已能够对准多个远端螺钉孔410,并且瞄准臂200能够围绕指向或穿过前弓弯折起始位置s的旋转轴线xx’旋转,因此远端瞄准孔210在瞄准臂200旋转适当角度后仍能对准远端螺钉孔410(在对准的过程中,可能需要利用射线对瞄准孔和螺钉孔的位置进行观察),而不会像双点划线所示的现有技术中的瞄准装置那样因瞄准臂的旋转轴线s’未对准前弓弯折起始位置s而导致在旋转后出现瞄准孔的轴向(图中所示的远近方向dp)位置与远端钉孔的轴向位置之间的偏差,而该轴向偏差会导致骨螺钉植入困难,甚至植入失败,或者医生强制植入骨螺钉,从而在髓内钉的表面产生划痕并因此影响其使用寿命。总的来说,利用本发明的髓内钉瞄准器,在髓内钉植入患者体内后,仍能使瞄准臂上的各个远端瞄准孔完全对准髓内钉上的各个远端螺钉孔,从而使得骨螺钉(尤其是远端骨螺钉)的植入能够顺利进行,并且保护髓内钉不被骨螺钉损坏,从而延长其使用寿命,同时由于手术得以顺利进行,因此可以缩短医生和患者暴露在射线下的时间。
49.根据本发明的另一方面,提供了一种骨骼治疗系统,其包括如上所述的髓内钉瞄准器以及所述髓内钉瞄准器所适用的一种或多种髓内钉,其中医生可以根据术前和/或术中规划从所述一种或多种髓内钉中选择任一髓内钉作为待植入的髓内钉400,所述待植入的髓内钉400被结合于所述手柄300的内端部320,所述连接装置100的主体110被固定于所述手柄300的外端部310,所述瞄准臂200在与所述待植入的髓内钉400相对应的位置处可旋转地耦合至所述连接装置100,以使得所述瞄准臂200的远端瞄准孔210对准所述待植入的髓内钉400的远端螺钉孔410,并且其中所述连接装置100将瞄准臂200的旋转轴线xx’定位成对准所述待植入的髓内钉400的前弓弯折起始位置s。
50.以上借助于附图详细描述了根据本发明的髓内钉瞄准器以及包括其的骨骼治疗系统的优选但非限制性的实施方式。对于本领域内的那些普通技术人员来说,在不偏离如下面的权利要求所阐述的本公开的范围和实质的情况下,对技术和结构的修改和补充显然都应视为包括在本发明的范围内。因此,在本发明的教导下所能设想到的这些修改和补充都应被视为本公开的一部分。本公开的范围通过以下所附的权利要求限定,并且包括在本公开的申请日时已知的等效技术和尚未预见的等效技术。