1.本发明涉及医疗领域,具体涉及一种用于医院病房的智能护理机器人。
背景技术:
2.静脉化疗就是静脉注射化疗药物,静脉化疗为止抗肿瘤药物的常用给药方法,静脉注射化疗药物,可以使化疗药物直接进入血液循环,能最大限度减少个体差异对于化疗药物吸收的影响,从而确保药物足剂量的到达全身,对于化疗次数较多的患者来说采用静脉置管配合静脉化疗的方式是最佳选择,这样不仅可以避免长期化疗多次穿刺血管对血管造成的损伤,还能减少扎针次数,另外,使用静脉置管不会像普通的静脉注射那样会限制患者的活动。
3.由于患者在非治疗期间对置入导管侧肢体保护不到位常常会出现导管破损,破损的导管会损伤血管壁,患者在进行下一次化疗输液时药液会通过破损的血管壁向外渗出至周围的皮肤和肌肉组织,而这一药液外渗的现象目前是经人眼去判断和识别的,并且在患者输液结束后还需要对患者前臂进行护理以增加患者前臂的血液循环缓解因化疗导致的前臂不适,通常化疗药液对皮肤和肌肉组织的损伤较大,其能够使皮肤和肌肉组织出现溃疡坏死等症状,化疗药液外渗发生后若患者能够得到及时处理会减弱化疗药液对皮肤和肌肉组织的损伤,但是由于医院的护理人员配备有限,一名护理人员往往需要护理多位患者,这就导致了接受静脉化疗治疗的患者往往得不到全面及时的护理,若接受静脉化疗治疗的患者在此种情况下出现药液外渗且得不到及时的护理处理的话,外渗的化疗药液将对接受静脉化疗治疗患者的皮肤和肌肉组织造成严重的不可修复的损伤,甚至危及生命,目前患者在接受静脉化疗治疗时,没有能够对接受静脉化疗治疗患者前臂穿刺部位进行护理和实时监测的装置。
技术实现要素:
4.为了解决上述背景技术中提出的问题,本发明提供了一种用于医院病房的智能护理机器人,能够实时的监测接受静脉化疗治疗的患者前臂穿刺部位的状态,并且在患者输液结束后还能够对患者前臂进行护理以增加患者前臂的血液循环缓解因化疗导致的前臂不适,而且在遇到穿刺部位因化疗药液外渗导致的肿胀、起热、变色以及滴管内药液滴速异常时能够通过切断模块首先阻断化疗药液继续注射,同时智能护理机器人还能够将警报信息传送至护士站的呼叫模块和移动设备以提醒护理人员及时对患者进行护理。
5.为实现上述目的,本发明提供以下技术方案:一种用于医院病房的智能护理机器人,包括护理模块、监测模块、滴管模块、切断模块和呼叫模块,所述护理模块包括固定板、前臂护理组件、手型调整组件、手型锁定组件和手型护理组件,所述固定板两侧设有滑轨,所述滑轨上设有滑座,所述前臂护理组件用于按摩患者前臂肌肉和血管,所述手型护理组件用于按摩患者手部肌肉和血管。
6.进一步的,所述前臂护理组件包括摇臂、第一轴杆、第二轴杆和底板,所述摇臂和
第二轴杆的数量均不少于两个,所述摇臂中部铰接于第一轴杆,所述摇臂一端安装延伸杆,所述延伸杆末端安装按摩球,所述按摩球用于按摩患者前臂区域的肌肉和血管,两个所述第二轴杆顶部均设有轴套,所述第一轴杆安装于两个轴套内,所述轴套与第一轴杆配合实现了第二轴杆沿第一轴杆轴向调节的目的,所述第二轴杆远离轴套的一端安装于底座上,所述底板表面开有第一滑槽和第二滑槽,所述第二轴杆安装于第二滑槽内,所述第二轴杆能够沿第二滑槽滑动,所述第二轴杆中部还设有按摩辊,所述按摩辊用于辊压按摩患者前臂两侧的肌肉和血管,所述摇臂远离第一轴杆的一端安装限位杆,所述限位杆另一端安装于第一滑槽内,所述限位杆能够沿第一滑槽滑动,所述限位杆上套接压簧,所述压簧位于摇臂和底板之间,所述限位杆能够对延伸杆下压的最大行程起限制作用,所述压簧能够通过摇臂向延伸杆持续的提供按摩所需的下压力。
7.进一步,所述手型调整组件包括滑道和凹面轮,所述滑道包括弧形部和竖直部,所述滑道数量为两个,两个所述滑道内设有第三轴杆,所述第三轴杆上套接凹面轮,所述凹面轮用于支撑和按摩患者指腹部位,所述弧形部内圈安装第一电机,所述滑道的弧形部和第三轴杆配合实现了以渐变的方式将患者手指向上翘起的目的,为对患者手背部位的肌肉和血管按摩创造条件,所述滑道的竖直部和第三轴杆配合实现了手型调整组件适应不同指长的患者。
8.更进一步的,所述第一电机轴端安装叉臂,所述第三轴杆端部套接于叉臂内,所述叉臂和第三轴杆配合满足了第三轴杆沿滑道的弧形部和竖直部运动的要求,所述第三轴杆端部安装第一推动螺母,所述叉臂侧面安装第二电机,所述第二电机轴端安装第一螺杆,所述第一螺杆与第一推动螺母螺接,所述第一螺杆旋转后能够通过与其螺接的第一推动螺母带动第三轴杆沿竖直部向上竖直举升。
9.进一步的,所述手型锁定组件包括第三电机和“z”形杆,所述第三电机的数量为两个,两个所述第三电机分别安装于竖直部顶端,两个所述第三电机轴端分别安装“z”形杆,两个所述“z”形杆远离第三电机的一端之间安装束带,所述束带用于锁定患者指背部位,所述“z”形杆的“z”形设计实现了在“z”形杆下压锁定患者指背部时不会对摆臂的运动造成干涉同时保证了束带对患者指背部位的束紧力。
10.进一步的,所述手型护理组件包括第四电机和摆臂,所述第四电机安装于竖直部外侧,所述第四电机轴端安装摆臂,所述摆臂上开有第三滑槽,所述第三滑槽内设有第四轴杆,所述第四轴杆上套接凸面轮,所述凸面轮的数量不少于十个,所述凸面轮直径自两端向中间逐渐减小,所述第四轴杆上凸面轮直径自两端向中间依次减小实现了多个凸面轮组合时能够贴合患者手背弧形的外轮廓对患者手背处肌肉和血管进行有效的辊压按摩,所述摆臂侧面安装第五电机,所述第五电机轴端安装第二螺杆,所述第四轴杆端部安装第二推动螺母,所述第二螺杆与第二推动螺母螺接,所述第二螺杆和第二推动螺母配合实现了第四轴杆和凸面轮沿摆臂的第三滑槽往复运动对患者手背处肌肉和血管进行往复辊压按摩。
11.作为上述技术方案的进一步改进:进一步的,所述监测模块用于探测固定板上患者前臂穿刺部位静脉注射治疗时的实时状态,所述滴管模块用于实时监测滴管内药液滴速以判断输液治疗是否存在异常,所述切断模块用于阻断输液管内的药液流动,所述呼叫模块用于提醒护理人员对患者进行医疗护理,所述固定板铰接于第三支柱顶部,所述固定板两侧设有滑轨,所述滑轨上设有滑
座,所述底座和弧形部均安装于滑座上,所述底座数量不少于四个,同侧的两个所述底座之间设有丝杠,所述丝杠上螺接底座,所述丝杠通过第六电机驱动,所述第六电机安装于底座侧面,所述固定板两侧铰接翼板,两个所述翼板边缘位置分别安装监测模块和切断模块,所述翼板外表面还安装控制器。
12.进一步的,使用监测模块对患者前臂穿刺部位进行实时监测能够实现在陪护和护理人员不在场的情况下,不间断的对患者前臂穿刺部位进行监测,提升了患者穿刺部位监测的精准性和及时性,同时在患者前臂穿刺部位出现肿胀、起热和变色症状时能够通过控制器和呼叫模块及时的通知护理人员对患者进行及时处理,减少药液外渗对患者穿刺部位周围的皮肤、血管和组织的伤害,提升了医护人员的响应速度,保证了患者的生命安全。
13.进一步的,所述监测模块安装于一侧翼板的轨道上,所述监测模块包括采像装置,所述监测模块能够沿轨道调整以实现采像装置对准患者前臂穿刺部位,所述监测模块的采像装置朝向患者前臂穿刺部位用以实时的监测患者前臂穿刺部位输液的状态。
14.进一步的,所述监测模块能够识别穿刺部位包括肿胀、起热、变色的异常输液现象,所述监测模块监测到患者前臂穿刺部位出现上述肿胀、起热、变色的异常输液现象后能够向控制器发送第一警报信息以激活控制器内的报警系统,所述报警系统启用后控制器将指令切断模块工作以阻断输液管内的药液流动,所述报警系统启用后控制器还能够向护士站内的呼叫模块和移动设备发送提示信息以提醒护士站的护理人员对患者进行及时护理。
15.更进一步的,监测模块通过控制器和护士站的呼叫模块及移动设备连接,实现了患者护理的智能化,减轻了护理人员的劳动强度的同时保证了护理人员护理的质量,避免了在出现药液外渗的时候由于陪护和护理人员繁忙无法及时的发现药液外渗而导致的医疗事故。
16.进一步的,所述滴管模块壳体表面开有卡槽,所述卡槽内设有液滴计数装置,所述卡槽用于卡装滴管,所述液滴计数装置用于测量滴管内部单位时间内的药液滴速进一步计算出输液速度,所述液滴计算装置在监测到药液滴落时间间隔超出滴管模块内所设阈值后能够向控制器发送第二警报信息以激活控制器内的报警系统,所述报警系统启用后控制器将指令切断模块工作以阻断输液管内的药液流动,所述报警系统启用后控制器还能够向护士站内的呼叫模块发送提示信息以提醒护士站的护理人员对患者进行及时护理。
17.更进一步的,通过滴管模块实时的监测单位时间内滴管内的滴液速度和滴液状态,滴管模块在结合输液治疗累积时长的前提下能够分析患者输液治疗是否存在输液异常的现象,在一定输液治疗时长的前提下且在药液滴落时间间隔超出滴管模块内所设阈值时,滴管模块将判定输液治疗存在异常,此时滴管模块将会向控制模块发送第二警报信息,以激活控制器内的报警系统,所述报警系统启用后控制器将指令切断模块工作以阻断输液管内的药液流动,同时控制器向护士站内的呼叫模块发送提示信息以提醒护士站的护理人员对患者进行及时护理。
18.进一步的,所述切断模块包括基座,所述基座内开有沟槽,所述沟槽用于固定输液管,其中,在所述基座上垂直于所述沟槽方向开有通孔,所述通孔内安装断路组件,所述断路组件包括电磁驱动部和楔块,所述电磁驱动部能够驱动楔块沿通孔做伸缩运动,所述通孔相对的一侧沟槽表面设有橡胶枕垫,所述楔块沿通孔向沟槽伸出后能够和橡胶枕垫配和挤压输液管以阻断输液管内的药液流动。
19.进一步的,所述固定板远离护理模块的一端设有肘托组件,所述肘托组件包括伸缩调节装置,所述伸缩调节装置安装于固定板下表面,所述肘托组件用于承托患者肘部,所述固定板下部设有滚轮座。
20.进一步的,所述滚轮座上部设有第一支柱,所述第一支柱侧面安装治疗托盘,所述治疗托盘用于盛放输液治疗的用具和药物,所述第一支柱顶部铰接第二支柱,所述第二支柱顶部设有旋转部,所述旋转部上部设有第三支柱,所述第三支柱顶部铰接固定板。
21.进一步的,所述旋转部用于调整第三支柱和固定板相对于滚轮座的位置,在滚轮座锁止不动的状态下即能够实现固定板最大程度的适应患者前臂的姿态,所述控制模块、呼叫模块和移动设备通过无线连接,所述监测模块、滴管模块、切断模块、第一电机、第二电机、第三电机、第四电机、第五电机和第六电机均与控制器连接。
22.本发明的有益效果是:本发明提供了一种用于医院病房的智能护理机器人,能够实时的监测接受静脉化疗治疗的患者前臂穿刺部位的状态,在遇到穿刺部位因药液外渗导致的肿胀、起热和变色以及滴管内药液滴速异常时时能够通过切断模块首先阻断化疗药液继续注射,同时智能护理机器人的控制器能够接收来自监测模块发出的第一警报信息和来自滴管模块发出的第二警报信息,所述控制器接收第一警报信息和第二警报信息中的任一警报信息后将主动的向护士站的呼叫模块发送提示信息,以提醒护士站的护理人员对患者进行及时护理,此外本发明的用于医院病房的智能护理机器人在患者输液结束后还能够对患者前臂进行护理以增加患者前臂的血液循环缓解因化疗导致的前臂不适。
23.其中,本发明的前臂护理组件用于按摩患者前臂肌肉和血管,手型护理组件用于按摩患者手部肌肉和血管,本发明的固定板和第三支柱铰接能够保持患者前臂上仰的姿态,促进患者血液回流,促进患者对药液的吸收,其中,本发明的弧形部和第三轴杆配合实现了以渐变的方式将患者手指向上翘起的目的,为对患者手背部位的肌肉和血管按摩创造条件,滑道的竖直部和第三轴杆配合实现了手型调整组件适应不同指长的患者;本发明手型锁定组件中的“z”形杆的“z”形设计实现了在“z”形杆下压锁定患者指背部时不会对摆臂的运动造成干涉同时保证了束带对患者指背部位的束紧力;本发明手型护理组件中的第四轴杆上凸面轮直径自两端向中间逐渐减小实现了多个凸面轮组合时能够贴合患者手背弧形的外轮廓对患者手背处肌肉和血管进行有效的辊压按摩。
24.此外翼板和固定板铰接能够实现在患者前臂穿刺时将底板两侧铰接的翼板展开组合成支撑平台方便护理人员对患者进行前臂静脉穿刺,在患者前臂静脉穿刺完成后将固定板两侧铰接的翼板折叠以使固定在翼板轨道上的监测装置实时的对患者前臂穿刺部位进行监测。
25.本发明的监测模块对患者前臂穿刺部位进行实时监测能够实现在陪护和护理人员不在场的情况下,不间断的对患者前臂穿刺部位进行监测,提升了患者穿刺部位监测的精准性和及时性,同时在患者前臂穿刺部位出现肿胀、起热和变色症状时能够通过控制器和呼叫模块及时的通知护理人员对患者进行及时处理,减少药液外渗对患者穿刺部位周围的皮肤、血管和组织的伤害,提升了医护人员的响应速度,保证了患者的生命安全。
26.本发明的滴管模块能够实时的监测单位时间内滴管内的药液滴速和滴液状态,滴管模块在结合输液治疗累积时长的前提下能够分析患者输液治疗是否存在输液异常的现象,在一定输液治疗时长的前提下且在药液滴落时间间隔超出滴管模块内所设阈值时,滴
管模块将判定输液治疗存在异常,此时滴管模块将会向控制模块发送第二警报信息,以激活控制器内的报警系统,所述警报系统启用后控制器将指令切断模块工作以阻断输液管内的药液流动,同时控制器向护士站内的呼叫模块发送提示信息以提醒护士站的护理人员对患者进行及时护理。
附图说明
27.为了更清楚的说明实施例中的技术方案,以下将对实施例中的附图作简单地介绍。
28.图1为本发明护理模块和固定板连接结构视图。
29.图2为本发明护理模块和滚轮座配合结构视图。
30.图3为本发明护理模块和滚轮座配合侧视图。
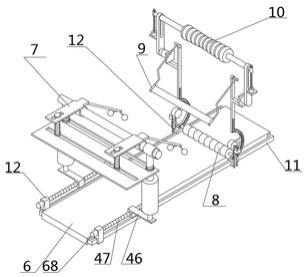
31.图4为本发明翼板展开视图。
32.图5为本发明护理模块结构视图。
33.图6为图5中a的放大视图。
34.图7为图5中b的放大视图。
35.图8为本发明滴管组件结构视图。
36.图9为本发明切断组件结构视图。
37.图10为本发明检测模块、滴管模块、呼叫模块和切断模块工作原理示意图。
38.图中:1、护理模块;2、监测模块;3、滴管模块;4、切断模块;6、固定板;7、前臂护理组件;8、手型调整组件;9、手型锁定组件;10、手型护理组件;11、滑轨;12、滑座;13、摇臂;14、第一轴杆;15、第二轴杆;16、底板;17、延伸杆;18、按摩球;19、轴套;20、第一滑槽;21、第二滑槽;22、按摩辊;23、限位杆;24、压簧;25、滑道;26、凹面轮;27、弧形部;28、竖直部;29、第三轴杆;30、第一电机;31、叉臂;32、第一推动螺母;33、第二电机;34、第一螺杆;35、第三电机;36、“z”形杆;37、束带;38、第四电机;39、摆臂;40、第三滑槽;41、第四轴杆;42、凸面轮;43、第二螺杆;44、第二推动螺母;46、底座;47、丝杠;48、第五电机;49、翼板;50、控制器;51、采像装置;52、卡槽;53、液滴计数装置;54、基座;55、沟槽;56、断路组件;57、电磁驱动部;58、楔块;59、橡胶枕垫;60、肘托组件;61、伸缩调节装置;62、滚轮座;63、第一支柱;64、治疗托盘;65、第二支柱;66、旋转部;67、第三支柱;68、第六电机。
具体实施方式
39.以下结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。有关本发明的具体机械结构,在以下配合参考图1至图10对结构的详细说明中将可清楚的呈现,以下实施例中所提到的结构内容,均是以说明书附图为参考。
40.实施例1:如图1至图10所示,本实施例的用于医院病房的智能护理机器人,包括护理模块1、监测模块2、滴管模块3、切断模块4和呼叫模块,护理模块1包括固定板6、前臂护理组件7、手型调整组件8、手型锁定组件9和手型护理组件10,固定板6两侧设有滑轨11,滑轨11上设有滑座12,前臂护理组件7用于按摩患者前臂肌肉和血管,手型护理组件10用于按摩患者手部肌肉和血管,前臂护理组件7包括摇臂13、第一轴杆14、第二轴杆15和底板16,摇臂13和第二
轴杆15的数量均不少于两个,摇臂13中部铰接于第一轴杆14,摇臂13一端安装延伸杆17,延伸杆17末端安装按摩球18,按摩球18用于按摩患者前臂区域的肌肉和血管,两个第二轴杆15顶部均设有轴套19,第一轴杆14安装于两个轴套19内,轴套19与第一轴杆14配合实现了第二轴杆15沿第一轴杆14轴向调节的目的,第二轴杆15远离轴套19的一端安装于底座46上,底板16表面开有第一滑槽20和第二滑槽21,第二轴杆15安装于第二滑槽21内,第二轴杆15能够沿第二滑槽21滑动,第二轴杆15中部还设有按摩辊22,按摩辊22用于辊压按摩患者前臂两侧的肌肉和血管,摇臂13远离第一轴杆14的一端安装限位杆23,限位杆23另一端安装于第一滑槽20内,限位杆23能够沿第一滑槽20滑动,限位杆23上套接压簧24,压簧24位于摇臂13和底板16之间,限位杆23能够对延伸杆17下压的最大行程起限制作用,所述压簧24能够通过摇臂13向延伸杆17持续的提供按摩所需的下压力。
41.具体的,手型调整组件8包括滑道25和凹面轮26,滑道25包括弧形部27和竖直部28,滑道25数量为两个,两个滑道25内设有第三轴杆29,第三轴杆29上套接凹面轮26,凹面轮26用于支撑和按摩患者指腹部位,弧形部27内圈安装第一电机30,滑道25的弧形部27和第三轴杆29配合实现了以渐变的方式将患者手指向上翘起的目的,为对患者手背部位的肌肉和血管按摩创造条件,所述滑道25的竖直部28和第三轴杆29配合实现了手型调整组件8适应不同指长的患者,第一电机30轴端安装叉臂31,第三轴杆29端部套接于叉臂31内,叉臂31和第三轴杆29配合满足了第三轴杆29沿滑道25的弧形部27和竖直部28运动的要求,第三轴杆29端部安装第一推动螺母32,叉臂31侧面安装第二电机33,第二电机33轴端安装第一螺杆34,第一螺杆34与第一推动螺母32螺接,更具体的,第一螺杆34旋转后能够通过与其螺接的第一推动螺母32带动第三轴杆29沿竖直部28向上竖直举升。
42.具体的,手型锁定组件9包括第三电机35和“z”形杆36,第三电机35的数量为两个,两个第三电机35分别安装于竖直部28顶端,两个第三电机35轴端分别安装“z”形杆36,两个“z”形杆36远离第三电机35的一端之间安装束带37,束带37用于锁定患者指背部位,“z”形杆36的“z”形设计实现了在“z”形杆36下压锁定患者指背部时不会对摆臂39的运动造成干涉同时保证了束带37对患者指背部位的束紧力。
43.具体的,手型护理组件10包括第四电机38和摆臂39,第四电机38安装于竖直部28外侧,第四电机38轴端安装摆臂39,摆臂39上开有第三滑槽40,第三滑槽40内设有第四轴杆41,第四轴杆41上套接凸面轮42,凸面轮42直径自两端向中间逐渐减小,第四轴杆41上凸面轮42直径自两端向中间逐渐减小实现了多个凸面轮42组合时能够贴合患者手背弧形的外轮廓对患者手背处肌肉和血管进行有效的辊压按摩,凸面轮42用于按摩患者手背部位的肌肉和血管,摆臂39侧面安装第五电机48,第五电机48轴端安装第二螺杆43,第四轴杆41端部安装第二推动螺母44,第二螺杆43与第二推动螺母44螺接,第二螺杆43和第二推动螺母44配合实现了第四轴杆41和凸面轮42沿摆臂39的第三滑槽40往复运动对患者手背处肌肉和血管进行往复辊压按摩。
44.具体的,监测模块2用于探测固定板6上患者前臂穿刺部位静脉注射治疗时的实时状态,滴管模块3用于实时监测滴管内药液滴速以判断输液治疗是否存在异常,切断模块4用于阻断输液管内的药液流动,呼叫模块用于提醒护理人员对患者进行医疗护理,固定板6铰接于第三支柱67顶部,固定板6两侧设有滑轨11,滑轨11上设有滑座12,底座46和弧形部27均安装于滑座12上,底座46数量不少于四个,同侧的两个底座46之间设有丝杠47,丝杠47
上螺接底座46,丝杠47通过第五电机48驱动,第五电机48安装于底座46侧面,固定板6两侧铰接翼板49,两个翼板49边缘位置分别安装监测模块2和切断模块4,翼板49外表面还安装控制器50。
45.更具体的,使用监测模块2对患者前臂穿刺部位进行实时监测能够实现在陪护和护理人员不在场的情况下,不间断的对患者前臂穿刺部位进行监测,提升了患者穿刺部位监测的精准性和及时性,同时在患者前臂穿刺部位出现肿胀、起热和变色症状时能够通过控制器50和呼叫模块及时的通知护理人员对患者进行及时处理,减少药液外渗对患者穿刺部位周围的皮肤、血管和组织的伤害,提升了医护人员的响应速度,保证了患者的生命安全。
46.具体的,监测模块2安装于一侧翼板49的轨道上,监测模块2包括采像装置51,监测模块2能够沿轨道调整以实现采像装置51对准患者前臂穿刺部位,监测模块2的采像装置51朝向患者前臂穿刺部位用以实时的监测患者前臂穿刺部位输液的状态。
47.具体的,监测模块2能够识别穿刺部位包括肿胀、起热、变色的异常输液现象,监测模块2监测到患者前臂穿刺部位出现上述肿胀、起热、变色的异常输液现象后能够向控制器50发送第一警报信息以激活控制器50内的报警系统,报警系统启用后控制器50将指令切断模块4工作以阻断输液管内的药液流动,报警系统启用后控制器50还能够向护士站内的呼叫模块和移动设备发送提示信息以提醒护士站的护理人员对患者进行及时护理。
48.更具体的,监测模块2通过控制器50和护士站的呼叫模块及移动设备连接,实现了患者护理的智能化,减轻了护理人员的劳动强度的同时保证了护理人员护理的质量,避免了在出现药液外渗的时候由于陪护和护理人员繁忙无法及时的发现药液外渗而导致的医疗事故。
49.具体的,滴管模块3壳体表面开有卡槽52,卡槽52内设有液滴计数装置53,卡槽52用于卡装滴管,液滴计数装置53用于测量滴管内部单位时间内的药液滴速进一步计算出输液速度,液滴计算装置在监测到药液滴落时间间隔超出滴管模块3内所设阈值后能够向控制器50发送第二警报信息以激活控制器50内的报警系统,报警系统启用后控制器50将指令切断模块4工作以阻断输液管内的药液流动,报警系统启用后控制器50还能够向护士站内的呼叫模块发送提示信息以提醒护士站的护理人员对患者进行及时护理。
50.具体的,通过滴管模块3实时的监测单位时间内滴管内的滴液速度和滴液状态,滴管模块3在结合输液治疗累积时长的前提下能够分析患者输液治疗是否存在输液异常的现象,在一定输液治疗时长的前提下且在药液滴落时间间隔超出滴管模块3内所设阈值时,滴管模块3将判定输液治疗存在异常,此时滴管模块3将会向控制模块发送第二警报信息,以激活控制器50内的报警系统,所述报警系统启用后控制器50将指令切断模块4工作以阻断输液管内的药液流动,同时控制器50向护士站内的呼叫模块发送提示信息以提醒护士站的护理人员对患者进行及时护理。
51.具体的,切断模块4包括基座54,基座54内开有沟槽55,沟槽55用于固定输液管,其中,在基座54上垂直于沟槽55方向开有通孔,通孔内安装断路组件56,断路组件56包括电磁驱动部57和楔块58,电磁驱动部57能够驱动楔块58沿通孔做伸缩运动,通孔相对的一侧沟槽55表面设有橡胶枕垫59,楔块58沿通孔向沟槽55伸出后能够和橡胶枕垫59配和挤压输液管以阻断输液管内的药液流动。
52.具体的,固定板6远离护理模块1的一端设有肘托组件60,肘托组件60包括伸缩调节装置61,伸缩调节装置61安装于固定板6下表面,肘托组件60用于承托患者肘部,所述固定板6下部设有滚轮座62。
53.具体的,滚轮座62上部设有第一支柱63,第一支柱63侧面安装治疗托盘64,治疗托盘64用于盛放输液治疗的用具和药物,第一支柱63顶部铰接第二支柱65,第二支柱65顶部设有旋转部66,旋转部66上部设有第三支柱67,第三支柱67顶部铰接固定板6,所述铰接处均可锁紧。
54.具体的,旋转部66用于调整第三支柱67和固定板6相对于滚轮座62的位置,在滚轮座62锁止不动的状态下即能够实现固定板6最大程度的适应患者前臂的姿态,控制模块50、呼叫模块和移动设备通过无线连接,监测模块2、滴管模块3、切断模块4、第一电机30、第二电机33、第三电机35、第四电机38、第五电机48和第六电机68均与控制器50连接。
55.实施例2:本实施例中与实施例1中相同的部分不再赘述,不同之处在于本发明的智能护理机器人的输液监测使用步骤。
56.步骤一、首先将固定板6两侧的翼板49放平,调整好固定板6相对于水平方向的倾角;步骤二、调整第二支柱65和第三支柱67相对于第一支柱63的位置并锁紧固定;步骤三、将患者一侧肘部放置在肘托组件上60,确保患者前臂平放至固定板6上,调节肘托组件60相对于固定板6的位置;步骤四、选取患者前臂饱满充盈的外周静脉进行消毒和穿刺输液;步骤五、将固定板6两侧的翼板49叠起,沿翼板49的轨道调整监测模块2的位置确保监测模块2对准患者前臂的穿刺部位;步骤六、将控制器50通电开机,将滴管模块3通电开机,将输液管的滴管卡入滴管模块3的卡槽52以对滴管内的药液滴速进行监测;步骤七、将切段模块4通电开机,将输液管靠近针头的一段输液管卡入切断模块4的沟槽55内。
57.实施例3:本实施例中与实施例1中相同的部分不再赘述,不同之处在于本发明的智能护理机器人的前臂护理使用步骤。
58.步骤一、首先将固定板6两侧的翼板49放平,调整好固定板6相对于水平方向的倾角;步骤二、调整第二支柱65和第三支柱67相对于第一支柱63的位置并锁紧固定;步骤三、将患者一侧肘部放置在肘托组件上60,确保患者前臂平放至固定板6,首先调节肘托组件60相对于固定板6的位置,然后沿滑轨11调整前臂护理组件7和手型调整组件8相对于患者前臂的位置确保患者手掌第三关节处对准手型调整组件8的凹面轮26,确保前臂护理组件7处于患者前臂处;步骤四、操作控制器50指令第一电机30运转通过第三轴杆29上的凹面轮26带动患者手掌沿滑道25的弧形部27翘起;步骤五、操作控制器50指令第二电机33运转,第二电机33运转后驱动第一螺杆34
旋转,第一螺杆34旋转后与第一推动螺母32配合将第三轴杆29沿滑道25的竖直部28向上推动将患者手指竖立;步骤六、操作控制器50指令第三电机35工作,第三电机35工作后驱动“z”形杆36运动并通过两个“z”形杆36之间的束带37将患者竖立的手指锁定;步骤七、操作控制器50指令第四电机38工作,第四电机38工作后驱动摆臂39带动凸面轮42下压至患者手背,操作控制器50指令第五电机48运转,第五电机48运转后驱动第二螺杆43运转,第二螺杆43运转后和第二推动螺母44配合驱动第四轴杆41和凸面轮42沿第三滑槽40往复运动对患者手臂部位的肌肉和血管进行辊压按摩;步骤八、操作控制器50指令第六电机68运转带动丝杠47旋转,丝杠47旋转后驱动与其螺接的底座46和安装于底座46的前臂护理组件7对患者前臂肌肉和血管进行往复按摩。
59.以上描述是对本发明的进一步解释及用于帮助理解本发明的方法及其核心思想,不是对发明的限定,本发明所限定的范围参见权利要求,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还能够做出若干改进、润饰或变化,也能够将上述技术特征以适当的方式进行组合,在不违背本发明的基本结构的情况下,本发明可以作任何形式的修改。