1.本发明属于医疗用器械技术领域,尤其是涉及一种肿瘤化疗患者专用腹部按摩装置。
背景技术:
2.化疗是化学药物治疗的简称,通过使用化学治疗药物杀灭癌细胞达到治疗目的。化疗是目前治疗癌症最有效的手段之一,和手术、放疗一起并称癌症的三大治疗手段。手术和放疗属于局部治疗,只对治疗部位的肿瘤有效,对于潜在的转移病灶(癌细胞实际已经发生转移,但因为目前技术手段的限制在临床上还不能发现和检测到)和已经发生临床转移的癌症就难以发挥有效治疗了。而化疗是一种全身治疗的手段,无论采用什么途径给药(口服、静脉和体腔给药等),化疗药物都会随着血液循环遍布全身的绝大部分器官和组织。因此,对一些有全身播撒倾向的肿瘤及已经转移的中晚期肿瘤,化疗都是主要的治疗手段。
3.肿瘤化疗患者在医院进行治疗时,由于需要进行长期的放化疗会严重影响患者的身体,并且随着放化疗的次数逐渐增多以及抗癌药物的不断摄入,患者很容易出现恶心呕吐等不良反应,不仅影响着患者的身体健康,并且很容易造成患者排斥饮食的心理,甚至容易使患者产生抵制治疗以及放弃治疗的想法,影响患者的生命安全,并会严重耽误治疗的进程。
4.目前,医护人员在对患者进行护理时,会积极的跟患者进行沟通,疏通患者的心理压力和紧张的情绪,通过腹部按摩的方式促进患者的肠胃消化,舒缓患者的身体,缓解患者恶心呕吐的状况。
5.但是,长期为多数患者进行按摩,极大的增加了医护人员的工作负担,费时费力,并且容易耽误医护人员的日常工作,降低了医护人员的工作效率。
技术实现要素:
6.本发明要解决的问题是提供一种按摩装置,尤其是结构简单,操作方便,专门适用于肿瘤化疗患者的腹部按摩,能有效缓解患者呕吐症状,舒缓患者神经,放松患者身体,自动化程度高,应用范围广的一种肿瘤化疗患者专用腹部按摩装置。
7.为解决上述技术问题,本发明采用的技术方案是:一种肿瘤化疗患者专用腹部按摩装置,包括壳体,所述壳体为柱状体,所述壳体内部设有空腔,所述壳体底面设有透孔,所述透孔与所述空腔连通,所述空腔内设有驱动机构,所述驱动机构连接内槽筒一端,所述内槽筒另一端由所述透孔露出连接按摩触手,所述壳体上设有固定装置,所述固定装置将所述按摩触手固定在患者腹部。
8.进一步的,所述内槽筒包括第一内槽筒和第二内槽筒,所述第一内槽筒与所述第二内槽筒以所述壳体中轴线为轴心对称分布,所述按摩触手包括第一按摩触手和第二按摩触手,所述第一内槽筒透过所述透孔连接所述第一按摩触手,所述第二内槽筒透过所述透孔连接所述第二按摩触手,所述驱动机构包括第一电机和第二电机,所述第一电机带动所
述第一按摩触手转动,所述第二电机带动所述第二按摩触手转动。
9.进一步的,所述驱动机构还包括第三电机,所述第三电机连接转盘,所述转盘置于所述壳体内,所述第一内槽筒与所述第二内槽筒分别置于所述转盘一条直径两端部,所述第三电机带动所述转盘转动。
10.进一步的,所述第一电机带动所述第一按摩触手顺时针转动,所述第二电机带动所述第二按摩触手顺时针转动,所述第三电机带动所述转盘顺时针或逆时针转动。
11.进一步的,所述壳体顶部设有显示屏和按钮,所述空腔内部设有处理器,所述处理器分别连接所述显示屏、所述按钮和所述驱动机构。
12.进一步的,所述固定装置为腹部固定带,所述腹部固定带两端分别连接所述壳体两端部,所述腹部固定带包括第一束紧带和第二束紧带,所述第一束紧带和所述第二束紧带之间设有调节装置,用以调节所述腹部固定带与所述壳体形成的封闭圆环的直径。
13.进一步的,所述调节装置为粘扣,所述粘扣包括粘钩和粘毛,所述第一束紧带一端连接所述壳体端部,所述第一束紧带另一端设有所述粘钩,所述第二束紧带一端连接所述壳体另一端部,所述第二束紧带另一端设有所述粘毛。
14.进一步的,所述内槽筒为伸缩杆。
15.进一步的,所述伸缩杆包括丝杠和套筒,所述丝杠外表面设有外螺纹,所述套筒内表面设有内螺纹,所述外螺纹与所述内螺纹配合,所述丝杠一端连接所述驱动机构,所述丝杠另一端连接所述套筒一端,所述套筒另一端连接所述按摩触手。
16.进一步的,所述按摩触手为柔性材质。
17.本发明具有的优点和积极效果是:1、本发明结构简单,操作方便,通过驱动机构带动按摩触手转动,按摩触手对患者的腹部进行反复揉搓和揉动,充分促进患者肠胃蠕动,加强患者的舒适性,缓解患者呕吐的症状,避免医护人员长时间手动按摩,减轻了医护人员的工作负担,提高了肿瘤化疗患者的生活质量。
18.2、本发明通过第三电机连接转盘,转盘一条直径两端分别通过第一电机连接第一按摩触手、第二电机连接第二按摩触手,两个按摩触手充分模拟医护人员双手,模拟手部按摩特点,达到缓解患者腹部胀痛的效果,促进患者肠胃消化,加强患者舒适性,同时,通过显示屏和按钮,调节转盘及按摩触手的转动方向及转动频率,加强对患者的按摩效果和舒适度,功能多样,效果显著,灵活性强。
19.3、本发明将内槽筒设置为伸缩杆,伸缩杆带动按摩触手上下往复运动,对患者的腹部进行震动挤压按摩,同时,处理器通过控制伸缩杆的伸缩长度及按压时间,调节震动挤压强度及震动挤压频率,多种模式自由选择,自动化程度高,实用性强。
20.4、本发明通过腹部固定带将壳体固定到患者腹部,提高按摩效率,通过调节装置将腹部固定带形成封闭环,围绕在患者腹部,调节装置使用时能够自主调节相应固定位置,以适应不同的患者需求,应用范围广,实用性强。
附图说明
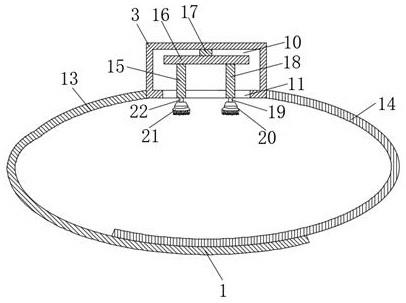
21.图1是本发明实施例的整体结构示意图。
22.图2是本发明一实施例的整体结构剖视图。
23.图3是本发明另一实施例的整体结构剖视图。
24.图4是本发明实施例的工作原理示意图。
25.图中:1、调节装置2、腹部固定带3、壳体4、显示屏5、按钮6、驱动机构7、套筒8、丝杠9、内槽筒10、空腔11、透孔12、按摩触手13、第一束紧带14、第二束紧带15、第一内槽筒16、转盘17、第三电机18、第二内槽筒19、第二电机20、第二按摩触手21、第一按摩触手22、第一电机。
具体实施方式
26.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.下面结合附图对本发明实施例做进一步描述:如图1、图2所示,一种肿瘤化疗患者专用腹部按摩装置,包括壳体3,壳体3为柱状体,壳体3内部设有空腔10,壳体3底面设有透孔11,透孔11与空腔10连通,空腔10内设有驱动机构6,驱动机构6连接内槽筒9一端,内槽筒9另一端由透孔11露出连接按摩触手12,壳体3上设有固定装置,固定装置将按摩触手12固定在患者腹部。
28.本实施例通过驱动机构6带动按摩触手12转动,按摩触手12对患者的腹部进行反复揉搓和揉动,充分促进患者肠胃蠕动,加强患者的舒适性,缓解患者呕吐的症状,避免医护人员长时间手动按摩,减轻了医护人员的工作负担,提高了肿瘤化疗患者的生活质量。
29.按摩触手12为模拟医护人员双手对患者腹部进行按摩,达到缓解患者腹部胀痛效果的装置。优选的,按摩触手12为柔性材质,避免按摩过程中,对患者身体造成硬性损伤。具体的,如图3、图4所示,本实施例提供的内槽筒9包括第一内槽筒15和第二内槽筒18,第一内槽筒15与第二内槽筒18以壳体3中轴线为轴心对称分布,按摩触手12包括第一按摩触手21和第二按摩触手20,第一内槽筒15透过透孔11连接第一按摩触手21,第二内槽筒18透过透孔11连接第二按摩触手20,驱动机构6包括第一电机22和第二电机19,第一电机22带动第一按摩触手21转动,第二电机19带动第二按摩触手20转动。
30.优选的,驱动机构6还包括第三电机17,第三电机17连接转盘16,转盘16置于壳体3内,第一内槽筒15与第二内槽筒18分别置于转盘16一条直径两端部,第三电机17带动转盘16转动。
31.本实施例通过第三电机17连接转盘16,转盘16一条直径两端分别通过第一电机22连接第一按摩触手21、第二电机19连接第二按摩触手20,两个按摩触手12充分模拟医护人员双手,模拟手部按摩特点,达到缓解患者腹部胀痛的效果,促进患者肠胃消化,加强患者舒适性。
32.优选的,壳体3顶部设有显示屏4和按钮5,空腔10内部设有处理器,处理器分别连
接显示屏4、按钮5和驱动机构6。
33.本实施例通过显示屏4和按钮5,调节转盘16及按摩触手12的转动方向及转动频率,加强对患者的按摩效果和舒适度,功能多样,效果显著,灵活性强。具体的,如图4所示,本实施例提供的第一电机22带动第一按摩触手21顺时针转动,第二电机19带动第二按摩触手20顺时针转动,第三电机17带动转盘16顺时针或逆时针转动。
34.固定装置为将壳体3固定在患者腹部的任一装置,固定装置可以为多种结构,只要实现上述功能即可。
35.具体的,如图2、图3所示,本实施例提供的固定装置为腹部固定带2,腹部固定带2两端分别连接壳体3两端部,腹部固定带2包括第一束紧带13和第二束紧带14,第一束紧带13和第二束紧带14之间设有调节装置1,用以调节腹部固定带2与壳体3形成的封闭圆环的直径。
36.调节装置1为实现上述功能的任一结构,具体的,本实施例提供的调节装置1为粘扣,粘扣包括粘钩和粘毛,第一束紧带13一端连接壳体3端部,第一束紧带13另一端设有粘钩,第二束紧带14一端连接壳体3另一端部,第二束紧带14另一端设有粘毛。使用时,将腹部固定带2围绕在患者腹部,腹部固定带2两端通过粘扣连接固定,粘扣开合方便快捷,穿戴方便。
37.也可以将内槽筒9设置为伸缩杆,伸缩杆带动按摩触手12上下往复运动,对患者的腹部进行震动挤压按摩,具体的,如图2所示,本实施例提供的伸缩杆包括丝杠8和套筒7,丝杠8外表面设有外螺纹,套筒7内表面设有内螺纹,外螺纹与内螺纹配合,丝杠8一端连接驱动机构6,丝杠8另一端连接套筒7一端,套筒7另一端连接按摩触手12。伸缩杆也可以是套管和内管,内管一端连接按摩触手12,内管另一端置于套管一端,套管另一端连接驱动机构6。处理器通过控制伸缩杆的伸缩长度及按压时间,调节震动挤压强度及震动挤压频率,多种模式自由选择,自动化程度高,实用性强。
38.上述各装置可利用各种各样的信号和技术来实现上述功能。这些信号和技术包括:正交信号、cdma、tdma、fdma、ofdma、超宽带信号、啁啾信号、激光信号以及许多其他信号。往来与处理器和各装置的信号可被调制(可使用am、fm、psk、fsk、msk、qam或任何其他可能的调制)或者可以其他方式被编码或配置为包含定时、同步、控制、数据、多路径信号分量标识、安全码、确保合适操作的信息和冗余。往来于处理器和各装置的信号可以包括gold码、pn码、m-sequence码、walsh码、walsh-hadamard码或任何其他编码。处理器可以为常规的芯片、单片机或控制器等装置,具有对应功能的模块,驱动上述装置实现上述功能,此处不再赘述。
39.处理器与驱动机构6、显示屏4、按钮5等的连接方式包括有线连接和无线连接。有线连接可通过串行总线、p1394、thunderbolt等方式连接,有线连接中的导线未在图1中示出,是为了避免杂乱。无线连接方式可通过bluetooth、bluetooth low energy、wifi、zigbee等方式连接。处理器与驱动电机6、显示屏4、按钮5等可经由有线或无线连接接收电力,也可从一次性电池或充电电池处接收电力。
40.本发明的工作原理是:将腹部固定带2围绕在患者腹部,腹部固定带2两端通过粘扣连接固定,避免壳体3在按摩过程中偏移。
41.打开按钮5,进行模式选择,当选择转盘16与第一按摩触手21及第二按摩触手20同时转动时,电源分别为第一电机22、第二电机19、第三电机17供电,第三电机17带动转盘16转动,第一电机22带动第一按摩触手21转动,第二电机19带动第二按摩触手20转动,根据实际所需,调节转盘16及按摩触手12的转动方向及转动频率。
42.当只选择转盘16转动时,电源为第三电机17供电,第三电机17带动转盘16转动,根据实际所需,调节转盘16的转动方向及转动频率。
43.当选择第一按摩触手21及第二按摩触手20同时转动时,电源分别为第一电机22、第二电机19供电,第一电机22带动第一按摩触手21转动,第二电机19带动第二按摩触手20转动,根据实际所需,调节按摩触手12的转动强度及转动频率。
44.当同时需要第一按摩触手21及第二按摩触手20挤压按摩时,电源分别为第一电机22、第二电机19供电,对应电机转动带动对应丝杠15正反转动,丝杠8转动带动套筒7上下移动,套筒7上下移动带动对应按摩触手12上下移动,对患者的腹部进行震动挤压按摩,根据实际所需,调节震动挤压强度及震动挤压频率。
45.本发明具有的优点和积极效果是:1、本发明结构简单,操作方便,通过驱动机构带动伸缩杆伸缩运动,伸缩杆带动按压板上下往复运动,按压板与患者胸骨下半部,胸部正中央,两乳头连线中点处接触,形成暂时的人工循环并恢复的自主搏动,按压效率高,有利于挽救患者生命。
46.2、本发明通过胸部固定带将按压板固定到患者所需按压部位,提高按压效率,通过调节装置将胸部固定带形成封闭环,围绕在患者胸口,调节装置使用时能够自主调节相应固定位置,以适应不同的患者需求,应用范围广,实用性强。
47.3、本发明通过开关按钮开启和结束按压模式,通过调节按钮设置所需按压频率及按压强度,处理器通过控制伸缩杆的伸缩长度及按压时间,调节按压强度和按压频率,精确度高,自动化程度高,实用性强。
48.4、本发明通过在按压板与患者接触面设置柔性层,避免胸外按压过程中,按压板对患者身体造成硬性损伤。
49.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。