1.本实用新型涉及体育机械技术领域,具体而言,涉及自动捡球机。
背景技术:
2.随着科技的进步,世界飞速发展,人们对于体育活动的关注越来越多,参与到体育项目中的人员也越来越多,在众多体育项目中,有很多人钟爱球类运动,例如乒乓球、网球和高尔夫等等,上述球类运动的兴起,也衍生了捡球的问题,尤其是网球和高尔夫球的捡取,既频繁,距离又较为分散,现阶段多为派遣人员手动捡球,效率低的同时,用人成本也相对较高,且一旦碰到人员锻炼接发球或者球技的时候,就有大量的球体会散落到球场中,快速且高效的将散落的球体捡起变成了急需的事情,故此如何能在控制人员成本的情况下,将捡球的效率提升的需求日渐显露。
3.综上所述,我们提出了自动捡球机解决以上问题。
技术实现要素:
4.本实用新型的目的在于提供自动捡球机,其能够改变现有人工捡球的现状,提高捡球的效率和精准度,同时节省人力物力。
5.本实用新型的实施例是这样实现的:
6.自动捡球机,包括带有内腔的车体,上述车体的内腔设置有风机,上述车体转动设置有与其内腔相通的引导管,上述引导管的自由端置于上述车体外侧,上述车体外侧设置有用于调节引导管的机械手臂。
7.风机是依靠输入的机械能,提高气体压力并排送气体的机械,它是一种从动的流体机械,本实用新型利用风机的高速旋转,在密封的壳体内产生空气负压,从而将地面上的球体吸入到引导管内,从而达到将球体吸入进车体的目的;机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业,本实用新型使用机械手臂与可转动的引导管相配合,在拾取球体的时候,可以通过操控机械手臂的转动角度,改变引导管的定位方向,从而实现不需要车体转动就可以围绕车体进行360度全方位的吸取。解决传统人工捡球的弊端,更加精准高效的完成捡球的动作。
8.在本实用新型的一些实施例中,上述引导管的自由端连接有伸缩管,上述机械手臂的活动端设置于上述伸缩管。
9.伸缩管弥补了原有引导管移动行程上的短板,可以进行高度上的升降和倾斜,不使用的时候所需要存放引导管的空间相对较小。
10.在本实用新型的一些实施例中,上述车体内腔设置有将其隔绝成两个独立密闭腔体的隔断板,上述隔断板一侧为吸入腔,另一侧为存储腔,上述风机设置于上述吸入腔内,上述吸入腔内沿上述存储腔方向倾斜设置有网板,上述隔断板开设有用于球体通过的流通
口。
11.网板的网口口径的数值小于球体的直径的数值,流通口设置有开关阀,当需要进行捡球动作时,开关阀是关闭的,风机通电,风机的叶片高速旋转,吸入腔的腔体内形成负压,引导管内部气压也低于外部大气压,球体被吸入,随着球体一同进入引导管的还有草屑、灰尘和碎石头,球体、草屑、灰尘和碎石头一同掉落到网板上,草屑、灰尘和碎石头经由网板的网口掉落,球体在重力的作用下直接经由流通口进入存储腔。
12.在本实用新型的一些实施例中,上述吸入腔内设置有水箱,上述水箱上设置有用于清洗球体的喷头。
13.球体掉落到球场表面会粘上些许灰尘,水箱的加设增加了清洗功能,
14.在本实用新型的一些实施例中,上述喷头内设置有流量控制阀。
15.流量控制阀又称400x流量控制阀,是一种采用高精度先导方式控制流量的多功能阀门。适用于配水管需控制流量和压力的管路中,保持预定流量不变,将过大流量限制在一个预定值,并将上游高压适当减低,即使主阀上游的压力发生变化,也不会影响主阀下游的流量。其连接方式分为法兰式与螺纹式;焊接式。控制调节方式分为自动与手动。本实用新型该实施例中,可以根据吸入球体的数量的多少,调控流量控制阀中液体的流量。
16.在本实用新型的一些实施例中,上述存储腔一侧的上述隔断板设置有用于引导球体的引导板,上述引导板开设有清理槽,上述清理槽内可拆卸设置有吸水布。
17.球体经由流通口进入存储腔后,直接掉落到引导板上,经过引导板时,引导板上的吸水布将球体表面的水珠吸干,干爽的球体掉落到存储腔。
18.在本实用新型的一些实施例中,上述吸入腔底部开设有与外界相通的清理口。
19.吸入腔底部开设有清理口,清理口处设置有盖板,捡球一段时间后,将盖板打开,吸入腔体内部的草屑、灰尘和石子掉落,完成相关车体的清理。
20.在本实用新型的一些实施例中,上述车体内设置有中央处理器,上述车体靠近上述引导管一侧设置有摄像头,上述摄像头和上述机械手臂均连接于上述中央处理器。
21.摄像头和机械手臂均与中央处理器相连接,摄像头将拍摄到镜像传输给中央处理器,由中央处理器进行影像分析,判别前方物体是否为要拾取的球体,另外影像的传输也可以在很大程度上避免车体撞到大型障碍物,起到一定的规避保护作用,分析后周边环境后,中央处理器可以根据实际环境控制机械手臂,进而调整引导管的位置,更加精准的拾取球体。
22.在本实用新型的一些实施例中,上述车体设置有超声波测距仪,上述超声波测距仪与上述中央处理器相连。
23.超声波测距仪是通过声速测量距离的仪器。装置上有设置瞄点装置,只要把仪器对准要测量的目标,就会出现一点在测距仪的显示屏幕上,超声波测距仪与中央处理器连接,当中央处理器其锁定球体后,通过开启超声波测距仪进行实际距离的测量,随后将测量的数据传递给中央处理器,由中央处理器控制车体的运行进程,以达到精准移动。
24.在本实用新型的一些实施例中,上述车体下方设置有履带。
25.履带是由主动轮驱动、围绕着主动轮、负重轮、诱导轮和托带轮的柔性链环。履带由履带板和履带销等组成。履带销将各履带板连接起来构成履带链环。履带板的两端有孔,与主动轮啮合,中部有诱导齿,用来规正履带,并防止坦克转向或侧倾行驶时履带脱落,在
与地面接触的一面有加强防滑筋(简称花纹),以提高履带板的坚固性和履带与地面的附着力,使用履带可以保证车体在场地较为不平整的情况下依旧可以平稳快速的运行。
26.相对于现有技术,本实用新型的实施例至少具有如下优点或有益效果:
27.本实用新型自动捡球机能够改变现有人工捡球的现状,提高捡球的效率和精准度,同时节省人力物力。
附图说明
28.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
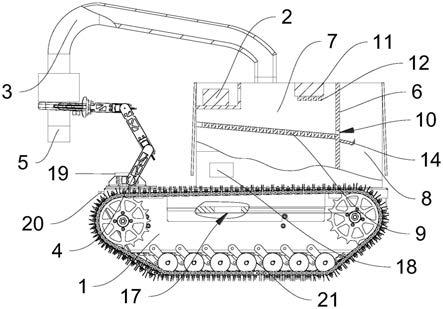
29.图1为本实用新型实施例的自动捡球机的结构示意图;
30.图2为图1中的引导板的剖视图;
31.图3为图1中的喷头的剖视图。
32.图标:1-车体,2-风机,3-引导管,4-机械手臂,5-伸缩管,6-隔断板,7-吸入腔,8-存储腔,9-网板,10-流通口,11-水箱,12-碰头,13-流量控制阀,14-引导板,15-清理槽,16-吸水布,17-清理口,18-中央处理器,19-摄像头,20-超声波测距仪,21-履带。
具体实施方式
33.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
34.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
35.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
36.在本实用新型实施例的描述中,需要说明的是,若出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
37.此外,若出现术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
38.若在本实用新型实施例的描述中有“多个”,则“多个”代表至少2个。
39.在本实用新型实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若
出现术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
40.实施例
41.请参照图1-图3,本实用新型的目的在于提供自动捡球机,其能够改变现有人工捡球的现状,提高捡球的效率和精准度,同时节省人力物力。
42.自动捡球机,包括带有内腔的车体1,上述车体1的内腔设置有风机2,上述车体1转动设置有与其内腔相通的引导管3,上述引导管3的自由端置于上述车体1外侧,上述车体1外侧设置有用于调节引导管3的机械手臂4。
43.本实用新型的原理:在众多体育项目中,有很多人钟爱球类运动,例如乒乓球、网球和高尔夫等等,上述球类运动的兴起,也衍生了捡球的问题,尤其是网球和高尔夫球的捡取,既频繁,距离又较为分散,现阶段多为派遣人员手动捡球,效率低的同时,用人成本也相对较高,且一旦碰到人员锻炼接发球或者球技的时候,就有大量的球体会散落到球场中,快速且高效的将散落的球体捡起变成了急需的事情,如何能在控制人员成本的情况下,将捡球的效率提升的需求日渐显露。本实用新型使用风机2和机械手背配合解决捡球问题。风机2是依靠输入的机械能,提高气体压力并排送气体的机械,它是一种从动的流体机械,本实用新型利用风机2的高速旋转,在密封的壳体内产生空气负压,从而将地面上的球体吸入到引导管3内,从而达到将球体吸入进车体1的目的;机械手臂4是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业,本实用新型使用机械手臂4与可转动的引导管3相配合,在拾取球体的时候,可以通过操控机械手臂4的转动角度,改变引导管3的定位方向,从而实现不需要车体1转动就可以围绕车体1进行360度全方位的吸取。解决传统人工捡球的弊端,更加精准高效的完成捡球的动作。
44.在本实用新型的一些实施例中,上述引导管3的自由端连接有伸缩管5,上述机械手臂4的活动端设置于上述伸缩管5。
45.在上述实施例中,伸缩管5也称伸缩节、膨胀节、补偿器,分为波纹补偿器、套筒补偿器、旋转补偿器、方形自然补偿器等几大类型,其中以波纹补偿器较为常用,主要为保障管道安全运行。伸缩管5弥补了原有引导管3移动行程上的短板,可以进行高度上的升降和倾斜,不使用的时候所需要存放引导管3的空间相对较小。
46.在本实用新型的一些实施例中,上述车体1内腔设置有将其隔绝成两个独立密闭腔体的隔断板6,上述隔断板6一侧为吸入腔7,另一侧为存储腔8,上述风机2设置于上述吸入腔7内,上述吸入腔7内沿上述存储腔8方向倾斜设置有网板9,上述隔断板6开设有用于球体通过的流通口10。
47.在上述实施例中,网板9的网口口径的数值小于球体的直径的数值,流通口10设置有开关阀,当需要进行捡球动作时,开关阀是关闭的,风机2通电,风机2的叶片高速旋转,吸入腔7的腔体内形成负压,引导管3内部气压也低于外部大气压,球体被吸入,随着球体一同进入引导管3的还有草屑、灰尘和碎石头,球体、草屑、灰尘和碎石头一同掉落到网板9上,草
屑、灰尘和碎石头经由网板9的网口掉落,球体在重力的作用下直接经由流通口10进入存储腔8。
48.在本实用新型的一些实施例中,上述吸入腔7内设置有水箱11,上述水箱11上设置有用于清洗球体的喷头。
49.在上述实施例中,球体掉落到球场表面会粘上些许灰尘,水箱11的加设增加了清洗功能,水箱11按材质分为玻璃钢水箱11、不锈钢水箱11、不锈钢内胆玻璃钢水箱11、海水玻璃钢水箱11、搪瓷水箱11、镀锌钢板水箱11六种。水箱11一般配有hyfi远传液位电动阀、水位监控系统和自动清洗系统以及自洁消毒器,水箱11的溢流管与水箱11的排水管阀后连接并设防虫网,水箱11应有高低不同的两个通气管(设防虫网),喷头,英文nozzle,与喷嘴的意义非常接近,一个是俗称一个是比较专业的说法。喷头是很多种喷淋,喷雾,喷油,喷砂设备里很关键的一个部件,甚至是主要部件。当球体在网板9上转动下落时,水箱11的阀口和喷头的开关同步开启,水流下落,开始清洗球体。
50.在本实用新型的一些实施例中,上述喷头内设置有流量控制阀13。
51.在上述实施例中,流量控制阀13又称400x流量控制阀13,是一种采用高精度先导方式控制流量的多功能阀门。适用于配水管需控制流量和压力的管路中,保持预定流量不变,将过大流量限制在一个预定值,并将上游高压适当减低,即使主阀上游的压力发生变化,也不会影响主阀下游的流量。其连接方式分为法兰式与螺纹式;焊接式。控制调节方式分为自动与手动。本实用新型该实施例中,可以根据吸入球体的数量的多少,调控流量控制阀13中液体的流量。
52.在本实用新型的一些实施例中,上述存储腔8一侧的上述隔断板6设置有用于引导球体的引导板14,上述引导板14开设有清理槽15,上述清理槽15内可拆卸设置有吸水布16。
53.在上述实施例中,球体经由流通口10进入存储腔8后,直接掉落到引导板14上,经过引导板14时,引导板14上的吸水布16将球体表面的水珠吸干,干爽的球体掉落到存储腔8。
54.在本实用新型的一些实施例中,上述吸入腔7底部开设有与外界相通的清理口17。
55.在上述实施例中,吸入腔7底部开设有清理口17,清理口17处设置有盖板,捡球一段时间后,将盖板打开,吸入腔7体内部的草屑、灰尘和石子掉落,完成相关车体1的清理。
56.在本实用新型的一些实施例中,上述车体1内设置有中央处理器18,上述车体1靠近上述引导管3一侧设置有摄像头19,上述摄像头19和上述机械手臂4均连接于上述中央处理器18。
57.在上述实施例中,中央处理器18(central processing unit,简称cpu)作为计算机系统的运算和控制核心,是信息处理、程序运行的最终执行单元。cpu自产生以来,在逻辑结构、运行效率以及功能外延上取得了巨大发展。摄像头19(camera或webcam)又称为电脑相机、电脑眼、电子眼等,是一种视频输入设备,被广泛的运用于视频会议,远程医疗及实时监控等方面。本实用新型实施例中,摄像头19和机械手臂4均与中央处理器18相连接,摄像头19将拍摄到镜像传输给中央处理器18,由中央处理器18进行影像分析,判别前方物体是否为要拾取的球体,另外影像的传输也可以在很大程度上避免车体1撞到大型障碍物,起到一定的规避保护作用,分析后周边环境后,中央处理器18可以根据实际环境控制机械手臂4,进而调整引导管3的位置,更加精准的拾取球体。
58.在本实用新型的一些实施例中,上述车体1设置有超声波测距仪20,上述超声波测距仪20与上述中央处理器18相连。
59.在上述实施例中,超声波测距仪20是通过声速测量距离的仪器。装置上有设置瞄点装置,只要把仪器对准要测量的目标,就会出现一点在测距仪的显示屏幕上,超声波测距仪20与中央处理器18连接,当中央处理器18其锁定球体后,通过开启超声波测距仪20进行实际距离的测量,随后将测量的数据传递给中央处理器18,由中央处理器18控制车体1的运行进程,以达到精准移动。
60.在本实用新型的一些实施例中,上述车体1下方设置有履带21。
61.在上述实施例中,履带21是由主动轮驱动、围绕着主动轮、负重轮、诱导轮和托带轮的柔性链环。履带21由履带21板和履带21销等组成。履带21销将各履带21板连接起来构成履带21链环。履带21板的两端有孔,与主动轮啮合,中部有诱导齿,用来规正履带21,并防止坦克转向或侧倾行驶时履带21脱落,在与地面接触的一面有加强防滑筋(简称花纹),以提高履带21板的坚固性和履带21与地面的附着力,使用履带21可以保证车体1在场地较为不平整的情况下依旧可以平稳快速的运行。
62.综上,本实用新型提供了自动捡球机,其至少具有以下有益效果:在众多体育项目中,有很多人钟爱球类运动,例如乒乓球、网球和高尔夫等等,上述球类运动的兴起,也衍生了捡球的问题,尤其是网球和高尔夫球的捡取,既频繁,距离又较为分散,现阶段多为派遣人员手动捡球,效率低的同时,用人成本也相对较高,且一旦碰到人员锻炼接发球或者球技的时候,就有大量的球体会散落到球场中,快速且高效的将散落的球体捡起变成了急需的事情,如何能在控制人员成本的情况下,将捡球的效率提升的需求日渐显露。本实用新型使用风机2和机械手背配合解决捡球问题。风机2是依靠输入的机械能,提高气体压力并排送气体的机械,它是一种从动的流体机械,本实用新型利用风机2的高速旋转,在密封的壳体内产生空气负压,从而将地面上的球体吸入到引导管3内,从而达到将球体吸入进车体1的目的;机械手臂4是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业,本实用新型使用机械手臂4与可转动的引导管3相配合,在拾取球体的时候,可以通过操控机械手臂4的转动角度,改变引导管3的定位方向,从而实现不需要车体1转动就可以围绕车体1进行360度全方位的吸取。解决传统人工捡球的弊端,更加精准高效的完成捡球的动作。
63.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。