1.本实用新型涉及康复训练领域,具体涉及一种手肢体康复训练设备。
背景技术:
2.人体手腕翻转、手臂旋转、肩关节旋转等功能恢复和力量增强训练是一个循序渐进的过程,针对不同年龄、不同病因、不同体貌特征的对象,为高效地达到康复的目标,均可有不同的细化训练计划要求。在康复训练中,获取相关物理数据,是训练对象感知交互、增强康复信心的需要,也是执行训练计划、评估训练效果及功能恢复的需要。
3.已有的康复训练器材设计,多侧重于能够实现某种单一动作的引导性往复运动;针对康复训练效果,侧重于依托人工现场评价的基本功能恢复定性化判定。这种状况,无法适应现代数字化康复医学发展的需要,也不利于康复训练阶段精细化管理的要求。
4.故现有技术缺乏一种实时采集康复训练中的物理数据,以数据引导科学训练,以数据展示现场状况,以数据综合评估康复训练效果的手肢体康复训练设备。
技术实现要素:
5.为解决以上技术问题,本实用新型提供了一种手肢体康复训练设备,实时采集康复训练中的物理数据,以数据引导科学训练,以数据展示现场状况,以数据综合评估康复训练效果,对发挥康复器械的作用和提升康复训练效果都具有十分重要的意义。
6.本实用新型采用以下技术方案:
7.一种手肢体康复训练设备,包括安装框架和安装于安装框架上的手腕训练器、小臂训练器、肩关节训练器、单片机系统、训练器显示屏和计算机系统,且手腕训练器、小臂训练器和肩关节训练器上各设有一路或多路扭矩传感器、一路角度传感器。
8.作为优选,所述手腕训练器包括与安装框架固定连接的第一固定装置,第一固定装置上设置有可移动的第一升降平台,第一升降平台上安装有第一阻尼装置,第一升降平台后侧设有第一阻尼调节装置,所述第一阻尼装置包括第一壳体,第一壳体设有第一安装孔,所述第一安装孔内贯穿有转动杆,所述转动杆中部为凸轮,第一壳体内还装有阻尼板,所述阻尼板上设有若干板簧,第一壳体内两侧设有滑动槽,阻尼板上设有相匹配的滑动件,所述滑动件可嵌入滑动槽内并在滑动槽内移动,所述第一阻尼调节装置为螺栓,第一升降平台上设有第一螺纹孔,螺栓贯穿第一升降平台的第一螺纹孔抵于阻尼板上。
9.作为优选,所述小臂训练器包括与安装框架固定连接的第二固定装置,第二固定装置上设置有可移动的第二升降平台,第二升降平台上安装有第二阻尼装置,第二升降平台上设有第二阻尼调节装置,所述第二阻尼装置包括第二壳体,第二壳体设有第二安装孔,第二安装孔内可转动的安装有转动件,所述转动件包括设置于外部的转动把手、设置于内部的转动柱和设置于转动柱上的挡板,所述第二阻尼调节装置包括调节螺栓、配合于调节螺栓上的调节螺母和固定连接于调节螺母上的调节弹簧,所述调节弹簧另一端连接于挡板上。
10.作为优选,肩关节训练器包括与安装框架固定连接的第三固定装置,第三固定装置上设置有可移动的第三升降平台,第三升降平台上安装有第三阻尼装置,第三阻尼装置上设有第三阻尼调节装置,所述第三阻尼装置包括第三壳体,第三壳体设有第三安装孔,第三安装孔内可转动的安装有转动块,所述转动块上连接有转动环,所述转动环上设有连接部,所述连接部上设有安装槽,所述安装槽内可安装有手持件,安装槽内还设有若干对限位槽,所述手持件底部设有限位连杆,手持件的安装壳上还设有限位孔和限位滑槽,所述限位连杆上相应位置设有弹性伸缩件和滑动销,所述滑动销在限位滑槽内滑动,手持件内设有人字形槽,所述限位连杆包括第一连杆,第一连杆下端设有两个铰接端,分别铰接一个第二连杆,第二连杆与第三连杆铰接,所述弹性伸缩件嵌入位于下方的限位孔内时,第二连杆和第三连杆为水平状态,第三连杆嵌入限位槽内,此时为第一状态,所述弹性伸缩件嵌入位于上方的限位孔内时,第二连杆为倾斜状态,手持件可在安装槽内移动,此时为第二状态。
11.与现有技术相比,本实用新型具有以下优点:
12.1、实时采集康复训练中的物理数据,以数据引导科学训练,以数据展示现场状况,以数据综合评估康复训练效果,对发挥康复器械的作用和提升康复训练效果都具有十分重要的意义。
13.2、手腕训练器通过凸轮对板簧进行挤压来提供阻尼,供训练者训练手腕关节,通过螺栓来调整板簧与凸轮之间的距离来调节阻尼大小,操作简单。
14.3、小臂训练器通过转动转动件对调节弹簧进行拉伸提供阻尼,并通过调节弹簧的收缩来实现复位,调节调节螺栓和调节螺母来调节阻尼大小,结构简单,方便操作。
15.4、肩关节训练器通过限位连杆将手持件进行固定,并且可以通过调节限位连杆来移动手持件以调节其与转动轴线的距离,以适应不同人手臂的长度,适应性强。
附图说明
16.图1为手腕训练器参数采集流程构成示意图。
17.图2为手肢体康复训练设备的整体工作示意图。
18.图3为目标训练曲线的构建示意图。
19.图4为手腕训练器结构示意图。
20.图5为手腕训练器主视图。
21.图6为图5的a-a剖视图。
22.图7为第一升降平台的结构示意图。
23.图8为第一壳体的结构示意图。
24.图9为小臂训练器的结构示意图。
25.图10为小臂训练器的主视图。
26.图11为图10的b-b剖视图。
27.图12为第二壳体的结构示意图。
28.图13第二阻尼调节装置与第二壳体的装配示意图。
29.图14为转动件的结构示意图。
30.图15为肩关节训练器的结构示意图。
31.图16为去除转动环的肩关节训练器的结构示意图。
32.图17为第三壳体的结构示意图。
33.图18为第三连杆嵌入限位槽内时手持件的剖视图。
34.图19为第三连杆脱离限位槽内时手持件的剖视图。
35.图20为手持件的局部剖视图。
36.图21为转动环的结构示意图。
37.图22为图21的c部局部放大图。
38.图23为转动环的俯视图。
39.图24为图23的d-d剖视图。
40.图25为图24的e局部放大图。
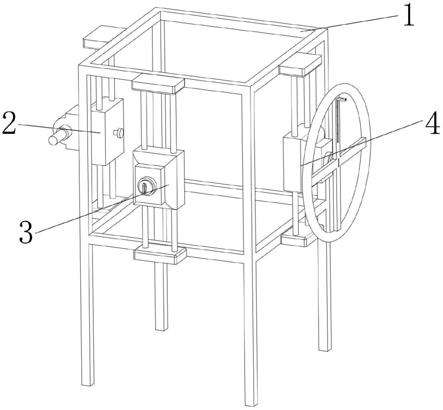
41.图26为康复训练设备的整体结构示意图。
42.图27为康复训练设备的电路结构示意图。
43.图中,安装框架1、手腕训练器2、第一固定装置21、第一升降平台22、第一螺纹孔221、第一阻尼装置23、第一壳体231、第一安装孔232、转动杆233、凸轮2331、阻尼板234、滑动件2341、板簧235、滑动槽236、第一阻尼调节装置24、小臂训练器3、第二固定装置31、第二升降平台32、第二阻尼装置33、第二壳体331、第二安装孔332、转动件333、转动把手3331、转动柱3332、挡板3333、第二阻尼调节装置34、调节螺栓341、调节螺母342、调节弹簧343、肩关节训练器4、第三固定装置41、第三升降平台42、第三阻尼装置43、第三壳体431、第三安装孔432、转动块433、转动环434、连接部4341、安装槽4342、限位槽4343、手持件435、限位连杆4351、限位孔4352、弹性伸缩件4353、人字形槽4354、安装壳4355、限位滑槽4356、滑动销4357、第三阻尼调节装置44、单片机系统5、训练器显示屏6、计算机系统7。
具体实施方式
44.为了便于理解本实用新型技术方案,以下结合附图与具体实施例进行详细说明。
45.实施例1
46.如图1-3所示,一种手肢体康复训练数据分析方法,其中各个曲线横轴表示时间,纵轴表示力矩与回转角的叠加;例如,在进行手腕关节的训练恢复中,将力矩调成50n
·
m,手腕训练器2的转动极限为90
°
,那么在0时刻,纵轴值为50,随着转动杆233的转动,曲线开始上升,升至纵轴值为140,再反向转动转动杆233,曲线开始下降,降至纵轴值为50,其中,纵轴值的差值就为回转角大小,50n
·
m为特定位力矩值,转动速度可以通过回转角大小与转动时间的比值来获取。
47.其具体步骤包括:
48.步骤1:构建康复评定标准曲线,以健康人(医疗标准下的)操作训练设备可以实现的手腕、手臂和肩关节的回转角、特定位力矩、转动速度,构建第一康复分级评估标准曲线,该曲线为常人可以进行日常生活的最低标准,该曲线横轴表示时间,纵轴表示力矩与回转角的叠加。
49.步骤2:采集病人当前健康状态下操作训练设备可以实现的手腕、手臂和肩关节的回转角、特定位力矩、转动速度,建立起符合该训练者的第二康复分级评估标准曲线,所述曲线为专门为该训练者定制的康复标准,该曲线的数值低于第一康复分级评估标准曲线,该曲线横轴表示时间,纵轴表示力矩与回转角的叠加。
50.步骤3:将手腕、手臂和肩关节上的第一康复分级评估标准曲线和第二康复分级评估标准曲线上相同横轴的纵轴值进行加权平均计算,得出该关节的目标训练曲线,该曲线横轴表示时间,纵轴表示力矩与回转角的叠加;
51.在构建目标训练曲线时,所述第二康复分级评估标准曲线中纵轴值所占权重大于第一康复分级评估标准曲线中纵轴值所占权重,可以使得目标训练曲线更接近训病人当前的身体状态,避免病人的训练量过大,在实际中,可以取第一康复分级评估标准曲线的权重范围为20%-40%,第二康复分级评估标准曲线的权重范围为60%-80%;
52.例如,在同一横轴上,第一康复分级评估标准曲线的纵轴值为150(取权重30%),第二康复分级评估标准曲线的纵轴值为100(取权重70%),那么可以得出,该时刻下目标训练曲线的纵轴值为115,以此类推,得出整条目标训练曲线。
53.步骤4:病人在手肢体康复训练设备上进行手腕、手臂和肩关节的康复训练,将实际训练产生的实际训练曲线(该曲线横轴表示时间,纵轴表示力矩与回转角的叠加)与目标训练曲线进行对比,计算两者的重合度,当重合度大于设定值时,判定实现训练目标;其中,所述重合度为相似度与差值改进值的差或和,其中相似度可以用基于点方法:edr,lcss,dtw或者基于形状的方法:frechet, hausdorff来进行计算,由于相似度为百分比,故将实际训练曲线与目标训练曲线的差值除以100(或者取1%的值)得到与相似度相近的差值改进值,再将相似度与差值改进值进行做差或者和得出重合度。
54.当实际训练曲线的纵轴值低于目标训练曲线的纵轴值时,实际训练曲线与目标训练曲线的差值的含义为未达到训练目标的程度,是一种降低重合度的数据,故将相似度与差值改进值进行做差得出重合度;当实际训练曲线的纵轴值高于目标训练曲线的纵轴值时,实际训练曲线与目标训练曲线的差值的含义为超过训练目标的程度,是一种提高重合度的数据,故将相似度与差值改进值进行求和得出重合度。
55.本实施例中,当重合度大于80%时,判定为实现训练目标。
56.步骤5:将被判定为实现训练目标时的实际训练曲线作为新的第二康复分级评估标准曲线,与第一康复分级评估标准曲线上相同横轴的纵轴值进行加权平均计算,得出某一关节的新的目标训练曲线,重复步骤4,直到实际训练曲线与第一康复分级评估标准曲线的重合度大于设定值,判定为恢复健康并发送给主治医生,本实施例中,该设定值为80%。
57.如图4-27所示,一种手肢体康复训练设备,包括安装框架1和安装于安装框架1上的手腕训练器2、小臂训练器3、肩关节训练器4、单片机系统5、训练器显示屏6和计算机系统7,且手腕训练器2、小臂训练器3和肩关节训练器4上各设有一路或多路扭矩传感器、一路角度传感器。图1以手腕训练器2为例来表示参数采集流程。
58.其中,三种训练器的力学平衡关系模型可表达为:
[0059][0060]
其中,t为操作输入力矩,tz为设备设置的阻力矩,n是设备上转轴的转速,均可认为是转角α和时间t的二维量。输入扭矩特性和阻力矩特性理论上都可以通过检测得到,所述图1中,在手腕训练器2全范围操作时,可通过扭矩传感器采集到输入扭矩信号t(t),通过角度传感器可以采集到转轴转角信号α(t);手腕训练器2上当两种信号同步采集时,也可转
换得到二维输入扭矩量t(α,t)。手腕训练器2上的阻力矩由第一阻尼装置23提供,在第一阻尼装置23预置位确定后,其阻尼特性也是确定的。
[0061]
所述手腕训练器2的转动杆233可从0
°
角开始绕轴
±
α角范围内扭转,扭转阻力取决于板簧235的弹性系数及第一阻尼调节装置24的调节。转动杆233上左右两侧均设有扭矩传感器,可采集转动扭矩数据;转动杆233上还装有角度传感器,可同步采集转动杆233的扭转角;两组数据可实时传入至单片机系统5,并进一步传至计算机系统7。
[0062]
所述手腕训练器2包括与安装框架1固定连接的第一固定装置21,第一固定装置21上设置有可移动的第一升降平台22,第一升降平台22上安装有第一阻尼装置23,第一升降平台22后侧设有第一阻尼调节装置24,所述第一阻尼装置23包括第一壳体231,第一壳体231设有第一安装孔232,所述第一安装孔232内贯穿有转动杆233,所述转动杆233中部为凸轮2331,第一壳体231内还装有阻尼板234,所述阻尼板234上设有若干板簧235,第一壳体231内两侧设有滑动槽236,阻尼板234上设有相匹配的滑动件2341,所述滑动件2341可嵌入滑动槽236内并在滑动槽236内移动,所述第一阻尼调节装置24为螺栓,第一升降平台22上设有第一螺纹孔221,螺栓贯穿第一升降平台22的第一螺纹孔221抵于阻尼板234上。
[0063]
所述手腕训练器2在使用时只需转动转动杆233,凸轮2331会接触并挤压板簧235,从而产生阻尼,以实现训练手腕的作用;若需要调节阻尼大小,只需螺栓进行旋转,例如将螺栓往内部旋转即将阻尼板234向接近转动杆233的方向移动,凸轮与阻尼板234之间的距离减小,转动凸轮需要更大的力,调大了阻尼大小。
[0064]
所述小臂训练器3的转动件333可从初始角位(0
°
)开始绕轴
±
α
°
范围内扭转,扭转阻力取决于调节弹簧343的弹性系数及第二阻尼调节装置34的调节。转动件333上装有扭矩传感器,可采集转动扭矩数据;转动件333上还装有角度传感器,可同步采集转动件333的扭转角;两组数据可实时传入至单片机系统5,并进一步传至计算机系统7。
[0065]
所述小臂训练器3包括与安装框架1固定连接的第二固定装置31,第二固定装置31上设置有可移动的第二升降平台32,第二升降平台32上安装有第二阻尼装置33,第二升降平台32上设有第二阻尼调节装置34,所述第二阻尼装置33包括第二壳体331,第二壳体331设有第二安装孔332,第二安装孔332内可转动的安装有转动件333,所述转动件333包括设置于外部的转动把手3331、设置于内部的转动柱3332和设置于转动柱3332上的挡板3333,所述第二阻尼调节装置34包括调节螺栓341、配合于调节螺栓341上的调节螺母342和固定连接于调节螺母342上的调节弹簧343,所述调节弹簧343另一端连接于挡板3333上。
[0066]
所述小臂训练器3在使用时只需转动转动把手3331,设置于转动柱3332上的挡板3333会随着转动把手3331一同转动,继而拉动调节弹簧343并使之形变产生阻尼,松开转动把手3331后调节弹簧343自动复位;若需要调节阻尼大小,只需转动调节螺栓341,由于调节弹簧343一端固定连接于挡板3333上,另一端固定连接调节螺母342,故转动调节螺栓341时,调节螺母342会在调节螺栓341上移动,从而改变调节弹簧343的长度来改变阻尼大小。
[0067]
所述肩关节训练器4的转动环434可从初始角位(0
°
)开始绕轴
±
α
°
范围内扭转,扭转阻力取决于第三阻尼装置43的弹性系数及第三阻尼调节装置44的调节。转动环434上装有扭矩传感器,可采集转动扭矩数据;转动环434上还装有角度传感器,可同步采集转动环434的扭转角;两组数据可实时传入至单片机系统5,并进一步传至计算机系统7。或者,在转动环434上应变式传感器也可以实现对扭转数据的采集。
[0068]
肩关节训练器4包括与安装框架1固定连接的第三固定装置41,第三固定装置41上设置有可移动的第三升降平台42,第三升降平台42上安装有第三阻尼装置43,第三阻尼装置43上设有第三阻尼调节装置44,所述第三阻尼装置43包括第三壳体431,第三壳体431设有第三安装孔432,第三安装孔432内可转动的安装有转动块433,所述转动块433上连接有转动环434,所述转动环434上设有连接部4341,所述连接部4341上设有安装槽4342,所述安装槽4342内可安装有手持件435,安装槽4342内还设有若干对限位槽4343,所述手持件435底部设有限位连杆4351,手持件435的安装壳4355上还设有限位孔4352和限位滑槽4356,所述限位连杆4351上相应位置设有弹性伸缩件4353和滑动销4357,所述滑动销4357在限位滑槽4356内滑动,当滑动销4357滑动到顶部时弹性伸缩件4353受压形变缩进安装壳4355内并向上移动,当滑动销4357滑动到底部时,弹性伸缩件4353嵌入限位槽4352内进行限位,防止限位连杆4351脱离与限位槽4343的配合,手持件435内设有人字形槽4354,所述限位连杆4351包括第一连杆,第一连杆下端设有两个铰接端,分别铰接一个第二连杆,第二连杆与第三连杆铰接,所述弹性伸缩件4353嵌入位于下方的限位孔4352内时,第二连杆和第三连杆为水平状态,第三连杆嵌入限位槽4343内,此时为第一状态,所述弹性伸缩件4353嵌入位于上方的限位孔4352内时,第二连杆为倾斜状态,手持件435可在安装槽4342内移动,此时为第二状态。
[0069]
肩关节训练器4在使用时,只需转动转动环434即可实现对肩关节的康复训练;若训练者因为手臂长度太长或者太短,手握手持件435时不方便,可以进行调节手持件435与转动轴的距离,即将弹性伸缩件4353按下将手持件435提起,弹性伸缩件4353嵌入位于上方的限位孔4352,此时第一连杆竖直,第二连杆倾斜,第三连杆水平且没有伸入限位槽4343内,可以在安装槽4342内移动,移动到合适位置后,将弹性伸缩件4353按下,将手持件435向下按压,使得弹性伸缩件4353嵌入位于下方的限位孔4352内,实现手持件435与转动轴的距离的调节,此时第一连杆竖直,第二连杆水平,第三连杆水平且伸入限位槽4343内。
[0070]
以上仅是本实用新型的优选实施方式,本实用新型的保护范围以权利要求所限定的范围为准,本领域技术人员在不脱离本实用新型的精神和范围内做出的若干改进和润饰,也应视为本实用新型的保护范围。