1.本发明涉及羽毛球发球技术领域,具体涉及一种可多向移动的羽毛球发球机器人。
背景技术:
2.羽毛球发球机,又称羽毛球发球机,是一种用于羽毛球等球类运动的机器。羽毛球发球机能够连续自动发球,用于供人练习接发球。现有的羽毛球发球机机械结构和控制程序比较复杂,价格昂贵,很难在小型羽毛球场或者个人羽毛球爱好者中普及使用。
技术实现要素:
3.本发明的目的在于提供一种可多向移动的羽毛球发球机器人,该机器人只需要一台电机和一个储气罐,即可实现多方向精准移动,具有机械结构及控制程序简单、可靠性高、运营成本低等特点。
4.为实现上述目的,本发明采用了以下技术方案:
5.一种可多向移动的羽毛球发球机器人,包括羽毛球发球组件和移动组件;所述移动组件包括底盘、安装在底盘上的车轮组件和车轮驱动组件;所述车轮组件包括车轮一、车轮二、车轮三和车轮四;所述车轮驱动组件包括用于带动车轮一运动的驱动单元一、用于带动车轮二运动的驱动单元二、用于带动车轮三运动的驱动单元三和用于带动车轮四运动的驱动单元四;所述驱动单元一包括可前后伸缩的传动杆一、分别安装在传动杆一前后两端的齿轮一与齿轮二、设置在传动杆一前侧的传动杆二、分别安装在传动杆二前后两端的齿轮三与齿轮四、可上下伸缩的传动杆三和安装在传动杆三下端且位于齿轮一与齿轮四上方的齿轮五;所述驱动单元二包括传动杆四和分别安装在传动杆四前后两端的齿轮六与齿轮七;所述驱动单元三包括传动杆五、分别安装在传动杆五前后两端的齿轮八与齿轮九、设置在传动杆五前侧的可前后伸缩的传动杆六、分别安装在传动杆六前后两端的齿轮十与齿轮十一、可上下伸缩的传动杆七和安装在传动杆七下端且位于齿轮八与齿轮十一上方的齿轮十二;所述驱动单元四包括传动杆八和分别安装在传动杆八前后两端的齿轮十三与齿轮十四。
6.进一步的,所述羽毛球发球组件包括羽毛球放置机构、羽毛球运送机构、羽毛球旋转机构、羽毛球发射机构和气动机构;所述羽毛球放置机构包括储球支架和安装在储球支架上端的储球座;所述羽毛球运送机构包括运球组件和用于带动运球组件沿储球支架升降的运球驱动组件;所述运球组件包括安装在储球支架上且与运球驱动组件相连的固定板以及分别贯穿安装在固定板两侧的夹爪一与夹爪二;所述羽毛球旋转机构包括异形齿条和与异形齿条相啮合的角度齿轮;所述角度齿轮中间贯穿安装有连接轴;所述连接轴的一端与发球座相连;所述羽毛球发射机构包括设置在储球座下方的发球座;所述发球座上开设有吹气通道;所述气动机构包括储气罐、用于交替向储气罐充气的一对充气气缸、用于驱动一对充气气缸交替运动的曲柄连杆组件、用于驱动曲柄连杆组件运动的驱动电机组件、与夹
爪一相连的气缸一、与夹爪二相连的气缸二、与异形齿条相连的用于驱动羽毛球转动的气缸三以及与发球座相连的用于驱动羽毛球发射的气路组件。
7.进一步的,所述气缸一用于驱动夹爪一运动,所述气缸二用于驱动夹爪二运动;所述运球驱动组件包括电机一、下端安装在电机一输出轴上的连动杆一和下端与连动杆一的上端相连的连动杆二;所述连动杆一与连动杆二通过转轴一相连,连动杆二的上端通过转轴二与固定板相连;所述固定板上设有位置开关。
8.进一步的,所述驱动电机组件包括电机二、安装在电机二的输出轴上的齿轮a、与齿轮a啮合相连的齿轮b、贯穿安装在齿轮b中的蜗杆、与蜗杆啮合相连的蜗轮和贯穿安装在蜗轮上的连接轴一;所述曲柄连杆组件包括与连接轴一相连的连杆一、通过连接轴二与连杆一相连的连杆二、通过连接轴三与连杆二相连的连杆三、通过连接件与连杆三相连的连杆四、通过连接轴四与连杆四相连的连杆五;所述连杆二与连杆五分别与一对充气气缸的活塞杆相连;所述电机二连接有蓄电池。
9.进一步的,所述气缸一通过气体管路一与储气罐相连,气缸二通过气体管路二与储气罐相连,气体管路一与气体管路二上均设有换向阀一和截止阀一;所述储气罐中设有压力阀;所述储气罐通过气路组件与吹气通道相连,气路组件上设有截止阀二;所述气缸三的进气口通过气体管路三与储气罐连,所述气体管路三上设有换向阀二和截止阀三。
10.进一步的,所述传动杆一和传动杆六的结构相同,均包括活动外壳、一端插入至活动外壳中的固定传动杆和嵌入设置在活动外壳内的弹簧一;所述弹簧一的一端与活动外壳相连,另一端与固定传动杆相连;所述活动外壳上开设有进气口一;所述齿轮一和齿轮十一分别与对应的活动外壳相连。
11.所述传动杆三和传动杆七的结构相同,均包括固定外壳、一端插入至固定外壳中的活动传动杆和嵌入设置在固定外壳中的弹簧二;所述弹簧二的一端与固定外壳相连,另一端与活动传动杆相连;所述固定外壳上开设有进气口二;
12.所述固定传动杆和固定外壳均安装在底盘上;所述齿轮五和齿轮十二分别与对应的活动传动杆相连。
13.进一步的,所述储气罐分别连接有三通电磁阀一和三通电磁阀二;所述传动杆一上的进气口一和传动杆三上的进气口二分别与三通电磁阀一的两个出气口相连;所述传动杆六上的进气口一和传动杆七上的进气口二分别与三通电磁阀二的两个出气口相连;所述三通电磁阀一的进气口和三通电磁阀二的进气口分别通过一气路与储气罐相连。
14.进一步的,所述电机二通过齿轮传动单元与车轮驱动组件相连;所述齿轮传动单元包括与电机二相连的齿轮十五、通过皮带一与齿轮十五传动配合的齿轮十六、通过皮带二与齿轮十六传动配合的齿轮十七、分别与齿轮十七啮合相连的齿轮十八与齿轮二十、通过传动轴一与齿轮十八相连的齿轮十九、通过传动轴二与齿轮二十相连的齿轮二十一、与齿轮二十一啮合相连的齿轮二十二、与齿轮二十二啮合相连的齿轮二十三以及通过传动轴三与齿轮二十三相连的齿轮二十四;所述齿轮十九分别与齿轮三、齿轮十四啮合相连;所述齿轮二十四分别与齿轮六、齿轮九啮合相连。
15.进一步的,所述车轮一通过车轮轴一安装在底盘上;车轮二通过车轮轴二安装在底盘上;车轮三通过车轮轴三安装在底盘上;车轮四通过车轮轴四安装在底盘上;所述车轮轴一上安装有与齿轮二啮合相连的齿轮二十五,车轮轴二上安装有与齿轮七啮合相连的齿
轮二十六,车轮轴三上安装有与齿轮十啮合相连的齿轮二十七,车轮轴四上安装有与齿轮十三啮合相连的齿轮二十八。
16.和现有技术相比,本发明的优点为:
17.(1)本发明所述的可多向移动的羽毛球发球机器人,其向各个方向移动的动力源为一个电机和一个储气罐,且该电机和储气罐可以和羽毛球夹球、羽毛球转动(即羽毛球方向调整)和羽毛球发射三个动作所需的动力源相同,这样设计能够使装置的结构变得简单化和小型化,运行起来更加稳定可靠,且故障率低、便于维护。
18.(2)本发明通过将传动杆一、传动杆三、传动杆六和传动杆七设计成可伸缩的结构,这样可以使不同的齿轮进行组合,不同的齿轮组合就可以实现不同方向的移动,从而可以使本发明所述的机器人能够根据需要移动到任意位置进行羽毛球发球操作,提高了发球准确率。
19.(3)为了确保储气罐中的气体压力能够满足三个动作的气体动力需求,而不会产生因为采用一个大功率气缸进行充气而带来的体积庞大、无法在羽毛球网上安装的难题,本发明采用一对小功率的充气气缸交替为储气罐充气,这样就能保证储气罐中源源不断地有气体输入,提高了充气效率,确保储气罐中的气体量充足,确保储气罐中的气体能够同时为羽毛球夹球、羽毛球转动(即羽毛球方向调整)和羽毛球发射三个动作提供气体动力。
20.(4)为了进一步使装置的结构更加简单,降低装置的成本,在曲柄连杆组件的协助下,本发明只采用一个小功率的微型电机就能够实现两个充气气缸的交替运动,借助齿轮传动组件,该电机还可以同时带动车轮的转动。而且该微型电机在空闲时间还能够为蓄电池充电,使蓄电池为装置的阀门等小器件供电,无需再额外配置电源。
21.(5)本发明通过高压气体吹动羽毛球使羽毛球发射出去,在发球过程中没有机械结构与羽毛球接触,不会使羽毛球挤压变形,保证羽毛球落点的准确性,延长了羽毛球的使用寿命。
附图说明
22.图1是本发明的结构示意图一;
23.图2是本发明的结构示意图二(未包含移动组件);
24.图3是本发明的结构示意图三(未包含移动组件);
25.图4是羽毛球放置机构、羽毛球运送机构、羽毛球旋转机构和羽毛球发射机构的装配结构示意图;
26.图5是充气气缸及曲柄连杆组件的装配结构示意图;
27.图6是移动组件的俯视图(未包含底盘);
28.图7是移动组件的仰视图(未包含底盘)。
29.其中:
30.101、储球支架,102、储球座;201、固定板,202、夹爪一,203、夹爪二,204、气缸一,205、气缸二,206、电机一,207、连动杆一,208、连动杆二,209、转轴一,210、转轴二,211、位置开关;301、发球座,302、吹气通道,303、气缸三,304、异形齿条,305、角度齿轮,306、连接轴,307、发球座支架,308、连接板;401、储气罐,402、充气气缸,403、电机二,404、齿轮a,405、齿轮b,406、蜗杆,407、蜗轮,408、连接轴一,409、连杆一,410、连接轴二,411、连杆二,
412、连接件,413、连杆三,414、连杆四,415、连杆五,416、电机二支架,417、气体管路一,418、气体管路二,419、三通电磁阀一,420、三通电磁阀二;501、车轮一,502、车轮二,503、车轮三,504、车轮四,505、车轮轴一,506、车轮轴二,507、车轮轴三,508、车轮轴四,509、齿轮二十五,510、齿轮二十六,511、齿轮二十七,512、齿轮二十八,513、底盘;601、传动杆一,602、齿轮一,603、齿轮二,604、传动杆二,605、齿轮三,606、齿轮四,607、传动杆三,608、齿轮五,609、传动杆四,610、齿轮六,611、齿轮七,612、传动杆五,613、齿轮八,614、齿轮九,615、传动杆六,616、齿轮十,617、齿轮十一,618、传动杆七,619、齿轮十二,620、传动杆八,621、齿轮十三,622、齿轮十四,623、传动轴一,624、齿轮十五,625、皮带一,626、齿轮十六,627、皮带二,628、齿轮十七,629、齿轮十八,630、齿轮十九,631、齿轮二十,632、齿轮二十一,633、齿轮二十二,634、齿轮二十三,635、齿轮二十四。
具体实施方式
31.下面结合附图对本发明做进一步说明:
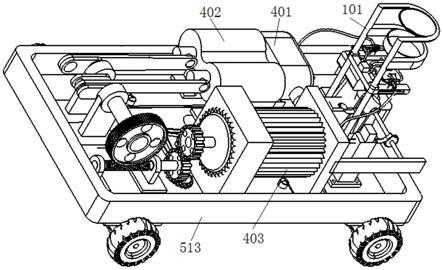
32.如图1所示的一种可多向移动的羽毛球发球机器人,包括羽毛球发球组件和移动组件;所述移动组件包括底盘、安装在底盘上的车轮组件和车轮驱动组件。所述羽毛球发球组件包括羽毛球放置机构、羽毛球运送机构、羽毛球旋转机构、羽毛球发射机构和气动机构。
33.如图2-图5所示,所述气动机构包括储气罐401、用于交替向储气罐充气的一对充气气缸402、用于驱动一对充气气缸交替运动的曲柄连杆组件、用于驱动曲柄连杆组件运动的驱动电机组件、与羽毛球运送机构相连的用于提供夹球动力的气缸一204及气缸二205、与羽毛球旋转机构相连的用于驱动羽毛球转动的气缸三以及与羽毛球发射机构相连的用于驱动羽毛球发射的气路组件。所述储气罐,用于为气缸一、气缸二、吹气通道和车轮的转向控制提供气源。
34.所述羽毛球放置机构包括储球支架101和安装在储球支架101上端的储球座102。储球支架101包括两根支柱和设置在两根支柱底部的支撑板。储球座102设置在两根支柱的上端一侧。储球座102,用于放置羽毛球。储球座102的形状和尺寸可以根据需要进行设置。
35.所述羽毛球运送机构包括运球组件和用于带动运球组件沿储球支架升降的运球驱动组件。所述运球组件包括安装在储球支架101上且与运球驱动组件相连的固定板201和分别贯穿安装在固定板201的两侧的夹爪一202与夹爪二203。所述气缸一204,用于驱动夹爪一202运动。所述气缸二205,用于驱动夹爪二203运动。所述固定板201上设有位置开关211。所述运球驱动组件包括电机一206、下端安装在电机一206输出轴上的连动杆一207和下端与连动杆一207的上端相连的连动杆二208;所述连动杆一207与连动杆二208通过转轴一209相连,连动杆二208的上端通过转轴二210与固定板201相连。固定板套设在储球支架的两根支柱上,且与支柱间隙配合。在运球驱动组件的作用下,固定板201可以沿着储球支架直线升降。固定板201为前端开口的u型,在其开口的两侧分别设有两个安装孔。夹爪一202与夹爪二203分别贯穿安装在两个安装孔中。在气缸一204的驱动下,夹爪一202可以沿固定板201的长度方向左右移动。在气缸二205的驱动下,夹爪二203可以沿固定板201的长度方向左右移动。夹爪一202与夹爪二203的内侧均为弧形,与羽毛球的头部的形状相适应。采用运球驱动组件驱动固定板及安装在固定板上方的部件沿储球支架升降,能够确保羽毛
球随夹爪升降过程的稳定性。通过气缸一与气缸二控制夹爪一与夹爪二的开合,既能够保证夹紧羽毛球,又能够对羽毛球的夹紧力进行精确调节,避免对羽毛球造成损坏。通过设置位置开关,能够保证夹爪一与夹爪二移动位置的准确性,使夹爪一与夹爪二能够恰好夹住羽毛球的头部位置,既能够夹紧羽毛球,又能够保护羽毛球。
36.当固定板201及位于固定板201上的气缸一204、气缸二205、夹爪一202和夹爪二203向上移动至指定位置时,位置开关会向控制器发送控制信号,使电机一206停止工作,气缸一204与气缸二205开始工作,在气缸一204与气缸二205的驱动下,夹爪一202与夹爪二203均向内侧移动,当夹爪一202与夹爪二203向内侧移动至设定位置时,夹爪一202与夹爪二203能够将位于储球座102中最下方的羽毛球夹住。此时,气缸一204与气缸二205停止工作,电机一206重新开始工作。此时,电机一206的转动方向与之前的转动方向相反,使固定板201及位于固定板201上的气缸一204、气缸二205、夹爪一202和夹爪二203向下移动,当向下移动至指定位置时,电机二停止工作,气缸一204与气缸二205重新启动,带动夹爪一202与夹爪二203同时向两侧移动,从而松开羽毛球,使羽毛球在自身重力作用下向下落到发球座301中。
37.所述羽毛球旋转发射机构包括设置在储球座下方的发球座301和用于驱动发球座转动的发球驱动组件。所述发球座301上开设有吹气通道302。所述发球驱动组件包括与气缸三303的活塞杆相连的异形齿条304、与异形齿条304相啮合的角度齿轮305。所述角度齿轮305中间贯穿安装有连接轴306;所述连接轴306的一端与发球座301相连。通过异形齿条与角度齿轮相互配合,能够实现连接轴及固定在连接轴上的发球座的转动。通过控制异形齿条的进给尺寸,能够对发球座的转动角度进行控制,从而实现不同角度的羽毛球的发射。羽毛球放置在发球座中,通过将储气罐中的气体注入到吹气通道中,给羽毛球一个作用力,使羽毛球发射出去。在羽毛球发射过程中,没有元器件与羽毛球相接触,不会影响羽毛球的落地动作,能够确保羽毛球落点的准确性。
38.所述驱动电机组件包括电机二403、安装在电机二403的输出轴上的齿轮a404、与齿轮a404啮合相连的齿轮b405、贯穿安装在齿轮b405中的蜗杆406、与蜗杆406啮合相连的蜗轮407和贯穿安装在蜗轮407上的连接轴一408。所述曲柄连杆组件包括与连接轴一408相连的连杆一409、通过连接轴二410与连杆一409相连的连杆二411、通过连接轴三与连杆二411相连的连杆三413、通过连接件412与连杆三413相连的连杆四414、通过连接轴四与连杆四414相连的连杆五415;所述连杆二411与连杆五415分别与一对充气气缸402的活塞杆相连。所述电机二403连接有蓄电池。连杆二与连杆五交替前后移动,连杆二向前的时候,连杆五向后。通过采用曲柄连杆组件驱动一对充气气缸交替对储气罐进行充气,能够提高充气效率,保证各个气缸的用气量能够及时供应。
39.所述气缸一204通过气体管路一417与储气罐401相连,气缸二205通过气体管路二418与储气罐401相连,气体管路一417与气体管路二418上均设有换向阀一和截止阀一。所述储气罐401中设有压力阀。所述储气罐401通过气路组件与吹气通道302相连,气路组件上设有截止阀二。所述气缸三303的进气口通过气体管路三与储气罐401相连,所述气体管路三上设有换向阀二和截止阀三。通过设置换向阀和截止阀,能够对各个气缸的运动状态进行实时控制,确保运球、发球动作的精准性。
40.本发明所述的羽毛球发球机器人的发球工作原理为:
41.(1)电机二403工作,带动齿轮一404转动,齿轮一404带动与其啮合的齿轮二405转动,齿轮二405带动与其固定相连的蜗杆406转动,蜗杆406带动与其啮合相连的蜗轮407转动,蜗轮407带动与其固定相连的连接轴一408转动。
42.(2)连接轴一408转动,带动连杆一409、连杆二411、连杆三413、连杆四414及连杆五415摆动,连杆二411与连杆五415的摆动方向相反;设一对充气气缸402分别为充气气缸一与充气气缸二,连杆二411用于驱动充气气缸一的活塞杆运动,为储气罐401充气;连杆五415用于驱动充气气缸二的活塞杆运动,为储气罐401充气;当储气罐401中的压力阀检测到的储气罐401内的压力值达到设定的最高阈值时,电机二停止工作。
43.(3)电机一206正向转动,带动连动杆一207与连动杆二208在竖直平面内正向转动,使固定板201及安装在固定板201上的气缸一204与气缸二205以及夹爪一202与夹爪二203沿储球支架向上运动,当位置开关214到达上方指定位置时,电机二403停止工作。
44.(4)气体管路一417与气体管路二418上的截止阀一打开,换向阀一正向打开,储气罐401中的气体分别向气体管路一417与气体管路二418中流动,使气缸一204与气缸二205工作,气缸一204和气缸二205驱动夹爪一202与夹爪二203向内侧运动。
45.(5)当夹爪一202与夹爪二203向内侧运动到一定位置后,夹爪一202与夹爪二203将放置在储球座102中的最下方的羽毛球夹紧,电机二403反向转动,带动连动杆一207与连动杆二208在竖直平面内反向转动,使固定板201及安装在固定板201上的气缸一204与气缸二205以及夹爪一202与夹爪二203沿储球支架101向下运动,当位置开关211到达下方指定位置时,电机二403停止工作。
46.(6)气体管路一417与气体管路二418上的截止阀一打开,换向阀一反向打开,储气罐401中的气体分别向气体管路一417与气体管路二418中流动,使气缸一204与气缸二205驱动夹爪一202与夹爪二203向外侧运动,位于夹爪一202与夹爪二203之间的羽毛球向下落到发球座301中。
47.(7)当羽毛球落到发球座301中后,气体管路三上的截止阀三打开,换向阀二正向打开,储气罐401中的气体流动到气体管路三中,接着进入到气缸三303中,使气缸三303带动异形齿条304正向移动,推动角度齿轮305正向转动,从而带动连接轴306以及固定安装在连接轴306上的发球座301一同正向转动。
48.(8)当发球座301转动到一定角度后,气路组件上的截止阀二打开,储气罐401中的气体流动到气路组件及吹气通道302中,给位于发球座301中的羽毛球一个作用力,使羽毛球向外发出。
49.(9)当羽毛球发出后,截止阀二关闭,换向阀二反向打开,气缸三303带动异形齿条304反向移动,推动角度齿轮305反向转动,使发球座301反向转动至初始位置,截止阀三和换向阀二关闭。
50.如图6和图7所示,所述车轮组件包括车轮一501、车轮二502、车轮三503和车轮四504。所述车轮一501通过车轮轴一505安装在底盘513上;车轮二502通过车轮轴二506安装在底盘513上;车轮三503通过车轮轴三507安装在底盘513上;车轮四504通过车轮轴四508安装在底盘513上。所述车轮轴一505上安装有与齿轮二603啮合相连的齿轮二十五509,车轮轴二506上安装有与齿轮七611啮合相连的齿轮二十六510,车轮轴三507上安装有与齿轮十616啮合相连的齿轮二十七511,车轮轴四508上安装有与齿轮十三621啮合相连的齿轮二
十八512。
51.所述车轮驱动组件包括用于带动车轮一运动的驱动单元一、用于带动车轮二运动的驱动单元二、用于带动车轮三运动的驱动单元三和用于带动车轮四运动的驱动单元四。所述驱动单元一包括可前后伸缩的传动杆一601、分别安装在传动杆一601前后两端的齿轮一602与齿轮二603、设置在传动杆一601前侧的传动杆二604、分别安装在传动杆二604前后两端的齿轮三605与齿轮四606、可上下伸缩的传动杆三607和安装在传动杆三607下端且位于齿轮一602与齿轮四606上方的齿轮五608。所述驱动单元二包括传动杆四609和分别安装在传动杆四609前后两端的齿轮六610与齿轮七611。所述驱动单元三包括传动杆五612、分别安装在传动杆五612前后两端的齿轮八613与齿轮九614、设置在传动杆五612前侧的可前后伸缩的传动杆六615、分别安装在传动杆六615前后两端的齿轮十616与齿轮十一617、可上下伸缩的传动杆七618和安装在传动杆七618下端且位于齿轮八613与齿轮十一617上方的齿轮十二619。所述驱动单元四包括传动杆八620和分别安装在传动杆八620前后两端的齿轮十三621与齿轮十四622。所述驱动单元一、驱动单元二、驱动单元三和驱动单元四采用同一电机(即电机二)驱动;所述传动杆一601、传动杆三607、传动杆六615和传动杆七618采用同一储气罐401作为伸缩运动的驱动气源。
52.进一步的,所述传动杆一601和传动杆六615的结构相同,均包括活动外壳、一端插入至活动外壳中的固定传动杆和嵌入设置在活动外壳内的弹簧一;所述弹簧一的一端与活动外壳相连,另一端与固定传动杆相连;所述活动外壳上开设有进气口一。所述齿轮一602和齿轮十一617分别与对应的活动外壳相连。当向活动外壳中充气时,气体会推动活动外壳沿固定传动杆的轴向移动,在活动外壳移动过程中,随着气压的增大,会压缩弹簧一。当活动外壳向外放气时,被压缩的弹簧一就会复位,推动活动外壳回到原位。
53.所述传动杆三607和传动杆七618的结构相同,均包括固定外壳、一端插入至固定外壳中的活动传动杆和嵌入设置在固定外壳中的弹簧二;所述弹簧二的一端与固定外壳相连,另一端与活动传动杆相连;所述固定外壳上开设有进气口二。在向固定外壳中充气时,气体会推动活动传动杆移动,在活动传动杆移动过程中,随着气压的增大,会压缩弹簧二。当固定外壳向外放气时,被压缩的弹簧二就会复位,推动活动传动杆回到原位。由于三通电磁阀的两个出气端分别连着一个活动外壳的进气口和一个固定外壳的进气口,因此,当向一个活动外壳充气时,与其对应的固定外壳就是进行放气操作。所述固定传动杆和固定外壳均安装在底盘上;所述齿轮五608和齿轮十二619分别与对应的活动传动杆相连。
54.进一步的,该移动机构还包括与储气罐401相连的三通电磁阀一419和三通电磁阀二420。所述传动杆一601上的进气口一和传动杆三607上的进气口二分别与三通电磁阀一419的两个出气口相连;所述传动杆六615上的进气口一和传动杆七618上的进气口二分别与三通电磁阀二420的两个出气口相连;所述三通电磁阀一419的进气口和三通电磁阀二420的进气口分别通过一气路与储气罐401相连。
55.进一步的,所述电机二403通过齿轮传动单元与车轮驱动组件相连;所述齿轮传动单元包括与电机二403相连的齿轮十五624、通过皮带一625与齿轮十五624传动配合的齿轮十六626、通过皮带二627与齿轮十六626传动配合的齿轮十七628、分别与齿轮十七628啮合相连的齿轮十八629与齿轮二十631、通过传动轴一623与齿轮十八629相连的齿轮十九630、通过传动轴二与齿轮二十631相连的齿轮二十一632、与齿轮二十一632啮合相连的齿轮二
十二633、与齿轮二十二633啮合相连的齿轮二十三634以及通过传动轴三与齿轮二十三634相连的齿轮二十四635;所述齿轮十九630分别与齿轮三605、齿轮十四622啮合相连;所述齿轮二十四635分别与齿轮六610、齿轮九614啮合相连。
56.本发明所述的羽毛球发球机器人的多向移动工作原理为:
57.(1)前后移动
58.将三通电磁阀一419连接传动杆一601进气口的端口关闭,连接传动杆三607进气口的端口打开;储气罐401中的气体进入到传动杆三607的活动外壳中,驱动传动杆三607的活动外壳带动齿轮五608向下移动,使齿轮五605与齿轮一602、齿轮四606相啮合,此时,传动杆三607中的弹簧为压缩状态;三通电磁阀二420连接传动杆六615进气口的端口关闭,连接传动杆七618进气口的端口打开;储气罐401中的气体进入到传动杆七618的活动外壳中,驱动传动杆七618的活动外壳带动齿轮十二619向下移动,使齿轮十二619与齿轮八613、齿轮十一617相啮合,此时,传动杆七618中的弹簧为压缩状态;电机二403转动,通过齿轮传动单元带动驱动单元一、驱动单元二、驱动单元三、驱动单元四运转,实现四个车轮的前后移动。
59.(2)左右转向
60.将三通电磁阀一419连接传动杆一601进气口的端口关闭,连接传动杆三607进气口的端口打开,或者是将三通电磁阀二420连接传动杆六615进气口的端口关闭,连接传动杆七618进气口的端口打开;储气罐401中的气体进入到传动杆三607的活动外壳中,驱动传动杆三607的活动外壳带动齿轮五608向下移动,使齿轮五608与齿轮一602、齿轮四606相啮合,此时,传动杆三607中的弹簧为压缩状态;或者是,储气罐401中的气体进入到传动杆七618的活动外壳中,驱动传动杆七618的活动外壳带动齿轮十二619向下移动,使齿轮十二619与齿轮八613、齿轮十一617相啮合,此时,传动杆七618中的弹簧为压缩状态;电机二403转动,通过齿轮传动单元带动驱动单元一、驱动单元二、驱动单元三、驱动单元四运转,实现四个车轮的左右转向。
61.(3)左右平移
62.将三通电磁阀一419连接传动杆一601进气口的端口打开,连接传动杆三607进气口的端口关闭;传动杆三607中的弹簧复位,使传动杆三607向上收缩,齿轮五608不再与齿轮一602、齿轮四606相啮合,储气罐401中的气体进入到传动杆一601的固定外壳中,驱动传动杆一601的活动传动杆带动齿轮一602向前移动,使齿轮一602与齿轮四606相啮合,此时,传动杆一601中的弹簧为压缩状态;将三通电磁阀二420连接传动杆六615进气口的端口打开,连接传动杆七618进气口的端口关闭;传动杆七618中的弹簧复位,使传动杆七618向上收缩,使齿轮十二619不再与齿轮八613、齿轮十一617相啮合,储气罐401中的气体进入到传动杆六615的固定外壳中,驱动传动杆六615的活动传动杆带动齿轮十一617向后移动,使齿轮十一617与齿轮八613相啮合,此时,传动杆六615中的弹簧为压缩状态;电机二403转动,通过齿轮传动单元带动驱动单元一、驱动单元二、驱动单元三、驱动单元四运转,实现四个车轮的左右平移。如要进行左右平移时只需控制三通电磁阀一和三通电磁阀二对各自连接的传动杆进行充气和放气即可。当对传动杆一进行充气、对传动杆三进行放气操作时,传动杆三中的弹簧处于压缩状态,该弹簧复位,带动传动杆三的活动传动杆向上移动,使传动杆三收缩,齿轮五与齿轮一、齿轮四不再啮合;传动杆一的活动外壳向靠近齿轮四的方向移
动,使齿轮一和齿轮四相啮合,传动杆一和传动杆二的转动方向一致。传动杆六和传动杆七的充放气及运动方式与传动杆一及传动杆三相同。
63.电机二403带动齿轮十五624转动,齿轮十五624通过皮带一625带动齿轮十六626转动,齿轮十六626通过皮带二627带动齿轮十七628转动,齿轮十七628带动齿轮十八629和齿轮二十631转动。齿轮十八629和齿轮二十631的转动方向相反。齿轮十八629通过传动轴一623带动齿轮十九630转动,齿轮十九630带动齿轮三605和齿轮十四622转动,齿轮三605和齿轮十四622的转动方向相反。齿轮三605通过传动杆二604带动齿轮四606转动。齿轮十四622通过传动杆八620带动齿轮十三621转动,齿轮十三621带动齿轮二十八512转动,齿轮二十八512通过车轮轴四508带动车轮四504转动。当齿轮五608与齿轮一602及齿轮四606相啮合时,齿轮六610带动齿轮五608转动,齿轮五608带动齿轮一602转动,齿轮一602通过传动杆一601带动齿轮二603转动,齿轮二603通过齿轮二十五509带动车轮一501转动,传动杆一601和传动杆二604的转动方向相反。当齿轮五608与齿轮一602及齿轮四606不接触,齿轮一602与齿轮四606啮合时,传动杆一601和传动杆二604同向转动。齿轮二十631带动齿轮二十一632转动,齿轮二十一632通过齿轮二十二633带动齿轮二十三634转动,通过设置齿轮二十二633(齿轮二十二为静态锥形齿轮),能够改变转动方向。齿轮二十三634带动齿轮二十四635转动,齿轮二十四635带动齿轮六610和齿轮九614转动,齿轮六610通过传动杆四609带动齿轮七611转动,齿轮九614通过传动杆五612带动齿轮八613转动。传动杆四609和传动杆五612的转动方向相反。齿轮七611带动齿轮二十六510转动,齿轮二十六510通过车轮轴二506带动车轮二502转动。当齿轮十二619与齿轮八613及齿轮十一617相啮合时,齿轮八613带动齿轮十二619转动,齿轮十二619带动齿轮十一617转动,齿轮十一617通过传动杆六615带动齿轮十616转动,齿轮十616带动齿轮二十七511转动,齿轮二十七511通过车轮轴三507带动车轮三503转动,此时,传动杆五612和传动杆六615的转动方向相反。当齿轮十二619与齿轮八613及齿轮十一617不相啮合,且齿轮八613与齿轮十一617啮合时,传动杆五612和传动杆六615一同同向转动。齿轮五608,用于使传动杆一601和传动杆八620的转动方向一致。齿轮十二619,用于使传动杆四609和传动杆六615的转动方向一致。
64.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。