1.本发明涉及锻炼装置技术领域,特别涉及一种基于腿骨复位固定的康复矫形锻炼器。
背景技术:
2.为了使腿伤患者将已经丧失的功能尽快地、能尽最大可能地得到恢复和重建,医生会通过康复矫形锻炼器对患者进行锻炼,从而提高患者的恢复速度,目前患者一般是通过佩戴塑形矫正器具并通过锻炼器对腿部进行锻炼。
3.然而,就目前锻炼器而言,其通过弹簧的弹力作为锻炼阻力,弹簧在拉伸过程中持续施加锻炼阻力,从而使得现有锻炼器无法将锻炼力度控制在一定范围内进行锻炼,锻炼方向单一,治疗康复效果较差,且患者在锻炼时锻炼行程大,采用弹簧作为阻力又存在锻炼行程内锻炼力度分布不均的问题,适应性较差,治疗效果不高,实用性较低。
技术实现要素:
4.有鉴于此,本发明提供一种基于腿骨复位固定的康复矫形锻炼器,其具有力度调节机构,通过力度调节机构能够将患者的锻炼力度控制在一定范围内,即全部锻炼行程内全部处于相应的锻炼力度,治疗效果好,且锻炼力度可自由调节,能够适应不同伤情的患者使用该装置进行锻炼康复,适应性强,双模式机构能够实现患者腿部的双向锻炼(如腿部的伸展和收回),进一步提高了该装置适应性,实用性极高。
5.本发明提供了一种基于腿骨复位固定的康复矫形锻炼器,具体包括外部组件;
6.所述外部组件包括有安装底座和训练座椅,所述训练座椅固定安装在安装底座的顶部,且安装底座的内部安装有锻炼康复组件;
7.所述锻炼康复组件包括有力度调节机构和双模式机构,所述力度调节机构包括有阻力壳、控制浮块、调节杆和传递杆,所述阻力壳插接在安装底座的内部,且控制浮块插接在阻力壳的内部,所述调节杆转动连接在阻力壳的内部,且传递杆插接在阻力壳的内部;
8.所述双模式机构包括有正向联动杆和反向联动杆,所述正向联动杆插接在安装底座顶部的右侧,且反向联动杆插接在安装底座顶部的左侧;
9.脚部固定板,所述脚部固定板插接在安装底座顶面的中部。
10.可选的,所述阻力壳的内部插接有力度板,且力度板的板体为正多边形,调节杆的杆体外部设有螺纹,且调节杆通过杆体螺纹拧接在力度板的内部。
11.可选的,所述力度板的侧面设有控制拉簧,且控制拉簧的两端分别固定连接在力度板的侧面和传递杆的末端。
12.可选的,所述控制浮块的块体顶部设有单向卡齿,且安装底座的底部设有单向齿条,且单向卡齿插接在单向齿条的外部。
13.可选的,所述控制浮块的两侧均设有复位顶簧,且复位顶簧的两端分别固定连接在控制浮块的底部和安装底座的内部。
14.可选的,所述控制浮块的内部设有三角形的下压槽,且传递杆的杆体一端设有三角形的下压块,且传递杆的杆体穿过控制浮块的内部。
15.可选的,所述双模式机构还包括有:
16.双层齿轮,所述双层齿轮由顶部齿轮、转动杆和底部齿轮组成,且顶部齿轮和底部齿轮分别固定安装在转动杆的顶部和底部,转动杆转动连接在安装底座的内部。
17.可选的,所述传递杆的前端侧面设有联动齿条,且联动齿条与双层齿轮的底部齿轮传动连接。
18.可选的,所述正向联动杆的杆体侧面设有连接齿条,且反向联动杆的杆体侧面设有反向齿条,双层齿轮顶部齿轮的左右两侧的轮齿分别与连接齿条和反向齿条传动连接。
19.可选的,所述正向联动杆顶部后端和反向联动杆的顶部前端均设有连接块,且脚部固定板通过“u”形的固定销杆与双模式机构连接。
20.有益效果
21.该装置在使用时,力度调节机构能够将锻炼力度控制在一定范围内,从而使得患者的锻炼的全部行程均处于相应的锻炼力度范围内,治疗效果大大提高,且锻炼力度可自由调节,从而使得该装置能够适应对不同伤情的患者进行康复锻炼治疗,适应性极强,且双模式机构能够独立的对患者腿部伸展和收回动作进行训练,通过一个控制拉簧即可实现,降低了该装置使用和生产成本,治疗全面,提高了该装置的了灵活性、适应性和实用性。
22.此外,该装置力度调节机构的阻力壳和控制浮块能够将患者锻炼的力度控制在一定范围内,从而提高患者的治疗效果和使用感受,当通过脚部固定板进行康复锻炼时,脚部固定板在移动时能够通过双模式机构带动传递杆向前移动,传递杆在向前移动时由于控制浮块在复位顶簧的作用下顶部的单向卡齿卡接在单向齿条的内部,此时阻力壳无法移动从而能够通过控制拉簧的拉长实现对患者腿部的康复锻炼,下压块能够跟随传递杆的移动而移动,从而当下压块通过下压槽将控制浮块向下压动时,单向卡齿和单向齿条失去卡接关系,从而此时阻力壳在控制拉簧的作用下带动控制浮块同步向前移动,控制浮块在向前移动时下压块脱出下压槽的内部,从而控制浮块能够再次通过复位顶簧将单向卡齿卡接在单向齿条的外部,实现对阻力壳的重新定位,整个锻炼行程内力度调节机构会多次重复该过程,从而实现将患者锻炼行程内部的锻炼力度均控制在一定范围内,锻炼康复和治疗效果好,使用方便,提高了该装置的实用性和灵活性。
23.此外,调节杆能够调节患者在使用该装置时的锻炼力度,当转动调节杆时,由于力度板为正多边形设计,力度板不会跟随调节杆转动,从而调节杆转动时能够通过杆体螺纹带动力度板移动,改变了控制拉簧的初始拉伸长度,即改变了患者使用该装置的锻炼力度,能够适应对不同伤情病况患者的锻炼康复使用,提高了该装置的适应性和灵活性。
24.此外,双模式机构能够转换患者的锻炼模式,当患者需要伸展锻炼时通过固定销杆与正向联动杆的连接块连接,当患者伸展时能够通过脚部固定板带动正向联动杆向前移动,正向联动杆能够的连接齿条能够带动顶层齿轮转动,顶层齿轮转动时能够带动底层齿轮转动,底层齿轮转动时通过联动齿条拉伸传递杆实现锻炼操作,且当患者需要进行肢体收回训练时,通过固定销杆与反向联动杆的连接块连接,此时当患者收回肢体时能够通过脚部固定板带动反向联动杆向后移动,从而反向联动杆在向后移动时同样能够通过反向齿条带动顶层齿轮转动,且顶层齿轮在被反向联动杆带动转动的方向与顶层齿轮被正向联动
杆带动转动的方向相同,从而此时能够对患者进行肢体收回的训练,使用方便,调节灵活,能够适应患者不同动作的训练,适应性极强。
附图说明
25.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
26.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
27.在附图中:
28.图1示出了本发明的结构的示意图;
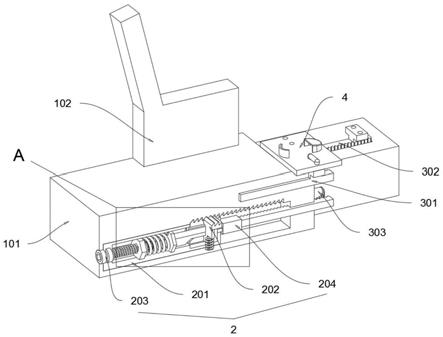
29.图2示出了本发明内部的结构示意图;
30.图3示出了本发明图2前侧的结构示意图;
31.图4示出了本发明患者进行腿部伸展康复锻炼时内部的结构示意图;
32.图5示出了本发明力度调节机构拆解后的结构示意图;
33.图6示出了本发明双模式机构和脚部固定板拆解后的结构示意图;
34.图7示出了本发明图2中a部位放大的结构示意图;
35.图8示出了本发明图3中b部位放大的结构示意图;
36.图9示出了本发明图4中c部位放大的结构示意图。
37.附图标记列表
38.1、外部组件;101、安装底座;1011、单向齿条;102、训练座椅;2、力度调节机构;201、阻力壳;2011、力度板;2012、控制拉簧;202、控制浮块;2021、单向卡齿;2022、复位顶簧;2023、下压槽;203、调节杆;204、传递杆;2041、下压块;2042、联动齿条;3、双模式机构;301、正向联动杆;3011、连接齿条;3012、连接块;302、反向联动杆;3021、反向齿条;303、双层齿轮;4、脚部固定板;401、固定销杆。
具体实施方式
39.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
40.实施例:请参考图1至图9:
41.本发明提出了一种基于腿骨复位固定的康复矫形锻炼器,包括外部组件1;
42.外部组件1包括有安装底座101和训练座椅102,训练座椅102固定安装在安装底座101的顶部,且安装底座101的内部安装有锻炼康复组件;
43.锻炼康复组件包括有力度调节机构2和双模式机构3,力度调节机构2包括有阻力壳201、控制浮块202、调节杆203和传递杆204,阻力壳201插接在安装底座101的内部,且控制浮块202插接在阻力壳201的内部,调节杆203转动连接在阻力壳201的内部,且传递杆204插接在阻力壳201的内部,力度调节机构2能够将锻炼力度控制在一定范围内,从而使得患者的锻炼的全部行程均处于相应的锻炼力度范围内,治疗效果大大提高,且锻炼力度可自由调节,从而使得该装置能够适应对不同伤情的患者进行康复锻炼治疗,适应性极强;
44.双模式机构3包括有正向联动杆301和反向联动杆302,正向联动杆301插接在安装
底座101顶部的右侧,且反向联动杆302插接在安装底座101顶部的左侧,双模式机构3能够独立的对患者腿部伸展和收回动作进行训练,通过一个控制拉簧2012即可实现,降低了该装置使用和生产成本,治疗全面;
45.脚部固定板4,脚部固定板4插接在安装底座101顶面的中部。
46.此外,根据本发明的实施例,如图5所示,阻力壳201的内部插接有力度板2011,且力度板2011的板体为正多边形,调节杆203的杆体外部设有螺纹,且调节杆203通过杆体螺纹拧接在力度板2011的内部,在使用中,调节杆203能够调节患者在使用该装置时的锻炼力度,当转动调节杆203时,由于力度板2011为正多边形设计,力度板2011不会跟随调节杆203转动,从而调节杆203转动时能够通过杆体螺纹带动力度板2011移动,改变了控制拉簧2012的初始拉伸长度,即改变了患者使用该装置的锻炼力度,能够适应对不同伤情病况患者的锻炼康复使用,灵活性强。
47.此外,根据本发明的实施例,如图5所示,力度板2011的侧面设有控制拉簧2012,且控制拉簧2012的两端分别固定连接在力度板2011的侧面和传递杆204的末端,在使用中,当通过脚部固定板4进行康复锻炼时,脚部固定板4在移动时能够通过双模式机构3带动传递杆204向前移动,控制浮块202的块体顶部设有单向卡齿2021,且安装底座101的底部设有单向齿条1011,且单向卡齿2021插接在单向齿条1011的外部,传递杆204在向前移动时由于控制浮块202在复位顶簧2022的作用下顶部的单向卡齿2021卡接在单向齿条1011的内部,此时阻力壳201无法移动从而能够通过控制拉簧2012的拉长实现对患者腿部的康复锻炼,控制浮块202的内部设有三角形的下压槽2023,且传递杆204的杆体一端设有三角形的下压块2041,且传递杆204的杆体穿过控制浮块202的内部,下压块2041能够跟随传递杆204的移动而移动,从而当下压块2041通过下压槽2023将控制浮块202向下压动时,单向卡齿2021和单向齿条1011失去卡接关系,从而此时阻力壳201在控制拉簧2012的作用下带动控制浮块202同步向前移动,控制浮块202在向前移动时下压块2041脱出下压槽2023的内部,从而控制浮块202能够再次通过复位顶簧2022将单向卡齿2021卡接在单向齿条1011的外部,实现对阻力壳201的重新定位,整个锻炼行程内力度调节机构2会多次重复该过程,从而实现将患者锻炼行程内部的锻炼力度均控制在一定范围内,锻炼康复和治疗效果好,使用方便。
48.此外,根据本发明的实施例,如图5所示,控制浮块202的两侧均设有复位顶簧2022,且复位顶簧2022的两端分别固定连接在控制浮块202的底部和安装底座101的内部,在使用中,当通过双模式机构3控制力度调节机构2复位时,单向卡齿2021能够向下移动避让单向齿条1011,使得该装置复位方便,且该装置复位后单向卡齿2021能够在复位顶簧2022的作用下重新卡接在单向齿条1011的内部,以备下次锻炼使用。
49.双模式机构3还包括有:
50.双层齿轮303,双层齿轮303由顶部齿轮、转动杆和底部齿轮组成,且顶部齿轮和底部齿轮分别固定安装在转动杆的顶部和底部,转动杆转动连接在安装底座101的内部。
51.双模式机构3能够转换患者的锻炼模式:
52.此外,根据本发明的实施例,如图5和图6所示,,在使用中,。
53.此外,根据本发明的实施例,如图6所示,正向联动杆301的杆体侧面设有连接齿条3011,且反向联动杆302的杆体侧面设有反向齿条3021,双层齿轮303顶部齿轮的左右两侧的轮齿分别与连接齿条3011和反向齿条3021传动连接,该设计使得在患者的康复锻炼使用
时顶层齿轮在被反向联动杆302带动转动的方向与顶层齿轮被正向联动杆301带动转动的方向相同。
54.此外,根据本发明的实施例,如图5和图6所示,正向联动杆301顶部后端和反向联动杆302的顶部前端均设有连接块3012,且脚部固定板4通过“u”形的固定销杆401与双模式机构3连接,在使用中,当患者需要伸展锻炼时通过固定销杆401与正向联动杆301的连接块3012连接,当患者伸展时能够通过脚部固定板4带动正向联动杆301向前移动,正向联动杆301能够的连接齿条3011能够带动顶层齿轮转动,顶层齿轮转动时能够带动底层齿轮转动,传递杆204的前端侧面设有联动齿条2042,且联动齿条2042与双层齿轮303的底部齿轮传动连接,底层齿轮转动时通过联动齿条2042拉伸传递杆204实现锻炼操作,且当患者需要进行肢体收回训练时,通过固定销杆401与反向联动杆302的连接块3012连接,此时当患者收回肢体时能够通过脚部固定板4带动反向联动杆302向后移动,从而反向联动杆302在向后移动时同样能够通过反向齿条3021带动顶层齿轮转动,从而此时能够通过力度调节机构2对患者进行肢体收回的训练,使用方便,调节灵活,能够适应患者不同动作的训练。
55.本实施例的具体使用方式与作用:本发明中,感觉患者的伤情选择合适的锻炼力度,调节杆203能够调节患者在使用该装置时的锻炼力度,当转动调节杆203时,由于力度板2011为正多边形设计,力度板2011不会跟随调节杆203转动,从而调节杆203转动时能够通过杆体螺纹带动力度板2011移动,改变了控制拉簧2012的初始拉伸长度,即改变了患者使用该装置的锻炼力度,调节完成后患者坐在训练座椅102上,然后将需要锻炼腿部的脚插入到脚部固定板4的顶部,根据需要进行的训练选择双模式机构3的使用位置,当患者伸展时能够通过脚部固定板4带动正向联动杆301向前移动,正向联动杆301能够的连接齿条3011能够带动顶层齿轮转动,顶层齿轮转动时能够带动底层齿轮转动,底层齿轮转动时通过联动齿条2042拉伸传递杆204实现锻炼操作,且当患者需要进行肢体收回训练时,通过固定销杆401与反向联动杆302的连接块3012连接,此时当患者收回肢体时能够通过脚部固定板4带动反向联动杆302向后移动,从而反向联动杆302在向后移动时同样能够通过反向齿条3021带动顶层齿轮转动,且顶层齿轮在被反向联动杆302带动转动的方向与顶层齿轮被正向联动杆301带动转动的方向相同,从而此时能够对患者进行肢体收回的训练,通过脚部固定板4进行康复锻炼时,脚部固定板4在移动时能够通过双模式机构3带动传递杆204向前移动,传递杆204在向前移动时由于控制浮块202在复位顶簧2022的作用下顶部的单向卡齿2021卡接在单向齿条1011的内部,此时能够通过控制拉簧2012的拉长实现对患者腿部的康复锻炼,下压块2041能够跟随传递杆204的移动而移动,从而当下压块2041通过下压槽2023将控制浮块202向下压动时,单向卡齿2021和单向齿条1011失去卡接关系,从而此时阻力壳201在控制拉簧2012的作用下带动控制浮块202同步向前移动,控制浮块202在向前移动时下压块2041脱出下压槽2023的内部,从而控制浮块202能够再次通过复位顶簧2022将单向卡齿2021卡接在单向齿条1011的外部,实现对阻力壳201的重新定位,整个锻炼行程内力度调节机构2会多次重复该过程,从而实现将患者锻炼行程内部的锻炼力度均控制在一定范围内,锻炼康复和治疗效果好,使用方便。
56.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
57.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。