工位、喷气纺纱机及维护和/或调整工位的方法
1.本发明涉及一种喷气纺纱机的工位(arbeitsstelle),该工位具有卷绕单元和纺纱单元,该卷绕单元和该纺纱单元在操作位置中布置在该工位的机架处,其中该纺纱单元具有支承框架,在该支承框架上布置有至少一个牵伸装置和喷气纺纱喷嘴。此外,本发明还涉及一种具有至少一个工位的喷气纺纱机以及一种用于维护和/或调整喷气纺纱机的工位的方法。
2.已知的喷气纺纱机通常以高度模块化的方式来构造。这些喷气纺纱机在大多数情况下由多个相同类型的工位构成,这些工位又由各个模块(尤其至少一个纺纱单元和卷绕单元)构造而成。
3.例如ep 1 422 323 b1提出了一种具有多个纺纱站的纺织机器,其中每个纺纱站均具有条筒喂入装置(kannenvorlage)、纺纱单元和卷绕单元。纺纱单元和卷绕单元在此是以模块化的方式来构造的和可更换的,并且被挂到机架中或该机架上。在纺纱单元停止运转或出现故障的情况下可以简单且快速地更换这些纺纱单元。然而,如果停止运转是要在纺纱站的难以触及的区域中进行较小规模的维护工作和/或调整工作,则必须使相应所涉及的纺纱单元与机架脱钩并且将其移除。由于纺纱单元的重量,为此在大多数情况下需要附加的设备,以便能够将纺纱单元从机架移除。这导致维护工作和/或调整工作难以处理并且意味着工作耗费大。此外,在进行维护工作和/或调整工作之后必须再次将纺纱单元钩挂并且在必要时恢复与纺织机器的已移除的连接。
4.本发明的目的在于克服从现有技术已知的缺点。该目的尤其在于,提出一种工位、一种喷气纺纱机以及一种用于维护和/或调整工位的方法,其简化工位的维护和/或调整并且易于进入到工位的难以触及的区域。
5.该目的通过具有独立专利权利要求所述特征的一种工位、一种喷气纺纱机以及一种用于维护和/或调整工位的方法来实现。
6.提出一种喷气纺纱机的工位,该工位具有卷绕单元和纺纱单元,该卷绕单元和该纺纱单元在操作位置中布置在该工位的机架处。该纺纱单元具有支承框架,在该支承框架上布置有至少一个牵伸装置和喷气纺纱喷嘴。支承框架在此是支承纺纱单元的各个构件、尤其牵伸装置和喷气纺纱喷嘴的框架。机架是工位和/或喷气纺纱机的固定机架。在此卷绕单元和纺纱单元的如下位置应理解为操作位置,即,该位置被设置用于工位操作、尤其用于由纤维带生产纱线并且随后卷绕到线轴上。为此,纤维带借助于牵伸装置被拉伸并且随后被输送给喷气纺纱喷嘴。经拉伸的纤维带在该喷气纺纱喷嘴中被纺成纱线。随后纱线可以借助于抽出装置被抽出并且在卷绕单元中被缠绕到线轴上。
7.根据本发明,该纺纱单元藉由该支承框架以可运动、优选可枢转的方式布置在该机架处,以使该纺纱单元从该操作位置运动、尤其枢转到维护位置。在此纺纱单元的如下位置应理解为维护位置,即,该位置被设置用于维护和/或调整纺纱单元和/或工位。通过以可运动、尤其可枢转的方式将支承框架布置在机架处,在维护位置中支承框架的区域牢固地与机架相连接,由此使纺纱单元的至少一部分重量可以由机架来支承。由此,在工位的构件和/或区域在操作位置中难以触及的情况下,例如可以使操作人员和/或维修机器人易于触
及这些构件和/或区域。这些构件和/或区域可以是纺纱单元、卷绕单元和/或工位的如下构件和/或区域,即通过纺纱单元的此类运动(尤其枢转)可以简化这些构件和/或区域的可触及性。
8.有利的是,该纺纱单元尤其在该支承框架的区域中藉由铰接件支承在该机架处。借助于铰接件可以使纺纱单元从操作位置枢转到维护位置。此外,铰接件可以将纺纱单元的重力转移给机架。因此这种铰接件呈现纺纱单元在机架上的简单且可靠的支承。
9.此外,随之而来的优点是,该机架和/或该纺纱单元尤其在该支承框架的区域中具有锁定元件,该纺纱单元能够借助于该锁定元件被锁定在该操作位置和/或该维护位置。由此可以确保该纺纱单元保持在操作位置和/或维护位置。除此之外,在维护位置中还可以藉由锁定元件将纺纱单元的重量转移给机架。此外,通过在维护位置中进行锁定可以确保操作人员和/或维修机器人在维护和/或调整工位期间安全且不受干扰地工作。
10.此外有利的是,该机架和/或该纺纱单元尤其在该支承框架的区域中具有引导元件,该纺纱单元在从该操作位置运动到该维护位置和/或相反时借助于该引导元件被引导。此类引导元件可以显著提高纺纱单元在其运动(尤其其枢转)方面的稳定性。因此可以防止纺纱单元向不期望的方向(尤其与其枢转横向地)倾斜。引导元件在此例如可以是线性引导件、径向支承件和/或耦合机构。引导元件同样可以是在引导凹槽中被引导的栓形件。
11.还有利的是,该机架和/或该纺纱单元尤其在该支承框架的区域中具有位置传感器,该位置传感器被设计为用于监测该纺纱单元的位置。因此可以借助于位置传感器来检测纺纱单元是否处于操作位置、维护位置和/或在操作位置与维护位置之间运动(尤其枢转)。由此可以简化尤其由工位、维修机器人和/或人员进行的对纺纱单元的位置的识别和/或监测。位置传感器在此例如可以是光学传感器、接触传感器、倾斜仪、加速度传感器和/或磁传感器。
12.有利的是,该机架和/或该纺纱单元尤其在该支承框架的区域中具有驱动元件和/或阻尼元件,该纺纱单元在从该操作位置运动到该维护位置和/或相反时借助于该驱动元件和/或该阻尼元件被驱动和/或被加阻尼。因此,可以在从操作位置运动到维护位置和/或相反期间转移纺纱单元的至少一部分重量。如果有利地涉及驱动元件,则也可以自主地(尤其受工位控制地)实现运动。
13.此外有利的是,该纺纱单元具有布置在该支承框架处的纱线监测器和/或品质传感器。由此可以使纱线监测器和/或品质传感器运动到维护位置。因此,可以简化纱线监测器和/或品质传感器的维护和/或调整。
14.此外,随之而来的优点是,该工位和/或该纺纱单元尤其在该纺纱单元的控制单元的区域中具有至少一个联接元件。为了操作纺纱单元而必须给这个纺纱单元供应尤其电流、压缩空气和/或控制信号。该至少一个联接元件可以尤其在操作位置中连接纺织机器(尤其纺织机器的布置在机架处的区域)的供应线路并且因此确保纺纱单元的供应。此外,该至少一个联接元件可以在维护位置中将两个相互连接的供应线路彼此分开。由此可以额外确保在维护和/或调整工位期间纺纱单元不会不必要地被供应电流、压缩空气和/或控制信号。
15.此外,有利的是,喷气纺纱喷嘴在操作位置中被布置在第一位置并且在维护位置中占据第二位置。喷气纺纱喷嘴的第一位置和第二位置是水平和/或竖直地间隔开的。尤
其,与在维护位置和/或第二位置中相比,喷气纺纱喷嘴在操作位置和/或第一位置中被布置成水平地更靠近机器框架。尤其,与在维护位置和/或第二位置中相比,喷气纺纱喷嘴在操作位置和/或第一位置中被布置成竖直地更靠近卷绕单元。
16.此外,提出一种具有至少一个工位的喷气纺纱机。工位根据以上和/或以下说明来设计,其中所提及的特征可以单独地或以任意组合的形式存在。
17.此外,提出一种用于维护和/或调整喷气纺纱机的工位的方法,其中该工位具有卷绕单元和纺纱单元,该卷绕单元和该纺纱单元在操作位置中布置在该工位的机架处,并且其中该纺纱单元具有支承框架,在该支承框架上布置有至少一个牵伸装置和喷气纺纱喷嘴。藉由该支承框架使该纺纱单元从该操作位置运动、尤其枢转到维护位置。
18.有利的是,喷气纺纱机的工位根据以上和/或以下说明来设计,其中所提及的特征可以单独地或以任意组合的形式存在。
19.在以下实施例中描述本发明的其他优点。在附图中:
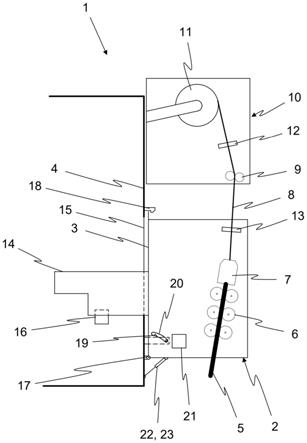
20.图1示出了处于操作位置下的喷气纺纱机的工位的示意性侧视图,
21.图2示出了处于维护位置下的图1的工位的示意性侧视图,
22.图3示出了处于操作位置下的根据一个替代性实施例的喷气纺纱机的工位的示意性侧视图,并且
23.图4示出了处于维护位置下的图3的工位的示意性侧视图。
24.在以下附图说明中,相同的附图标记用于在不同附图中相应相同和/或至少可相当的特征。各个特征、其设计方案和/或作用方式通常只有在其第一次提到时才会详细解释。如果没有再次详细解释各个特征,则其设计方案和/或作用方式对应于已经描述的相同作用或同名特征的设计方案和作用方式。
25.图1示出了处于操作位置下的喷气纺纱机的工位1的示意性侧视图,该工位具有纺纱单元2。纺纱单元2在操作位置中藉由支承框架3被布置在工位1的机架4处。在操作位置中借助于喷气纺纱喷嘴7将被输送给牵伸装置6的纤维带5纺成纱线8。纱线8随后借助于抽出装置9被抽出并且在卷绕单元10中被卷绕到线轴11上。
26.在所示出的实施例中,抽出装置9被布置在纺纱单元2的支承框架3处。此外,工位1具有纱线监测器12和品质传感器13。在此,纱线监测器12例如可以记录和/或确定纱线8的存在,和/或品质传感器13可以记录和/或确定纱线8的品质(尤其粗细、均匀度和/或毛羽)。品质传感器13在此被布置在喷气纺纱喷嘴7与抽出装置9之间并且因此被布置在纺纱单元2的支承框架3处。纱线监测器12被布置在抽出装置9与线轴11之间。同样可设想的是,除了品质传感器13之外或替代于此,纱线监测器12被布置在支承框架3处。
27.纺纱单元2具有控制单元14,以便控制这个纺纱单元。这个控制单元14在所示出的实施例中穿过机架4的凹口15突出。在这个控制单元14的区域中布置有联接元件16,该联接元件将工位1的供应线路与纺纱单元2连接。供应线路在此例如能够传递电流、压缩空气和/或控制信号。
28.在支承框架3的区域中,纺纱单元2藉由铰接件17以可枢转的方式支承在机架4处。第一锁定元件18在此确保纺纱单元2被锁定在操作位置。在所示出的实施例中,第一锁定元件18牢固地、直接和/或藉由支承件布置在机架4处。纺纱单元2的支承框架3在操作位置中与第一锁定元件18相连接,其方式为使得第一锁定元件18的底部缺口卡入和/或卡合在支
承框架3上。借助底部缺口将纺纱单元2固持在操作位置。如果第一锁定元件18从支承框架3松脱,则可以使纺纱单元2枢转到维护位置。为此,第一锁定元件18的底部缺口可以通过该支承件和/或通过塑性和/或弹性变形而从机架4松脱。
29.在图2中展示了处于这种维护位置下的图1的工位1的示意性侧视图。图2的工位1在此与图1的工位1相似或相同地设计并且不同之处基本在于纺纱单元2的位置。纺纱单元2在此藉由铰接件17支承在机架4处。通过将纺纱单元2枢转到如图2所展示的维护位置,可以更简单地对工位1和/或纺纱单元2进行维护和/或调整。因此,例如简化了对在维护位置中与纺纱单元2一起枢转的构件的可触及性。在此,在所示出的实施例中尤其是牵伸装置6、喷气纺纱喷嘴7、品质传感器13以及控制单元14。同样在此可设想的是,除了品质传感器13之外或替代于此,使纱线监测器12一起枢转。同样可设想的是,使联接元件16完全或部分地一起枢转。由于纺纱单元2的控制单元14穿过机架4突出,因此凹口15被设计成可以顺利地、尤其以机架4与控制单元14之间无接触的方式进行从操作位置到维护位置以及相反的枢转。除此之外,通过纺纱单元2的枢转和/或通过凹口15可以易于在工位1处(尤其在卷绕单元10处和/或机架4内)进行维护和/或调整。
30.为了在维护位置中进行锁定,支承框架3具有第二锁定元件19。通过第二锁定元件19将纺纱单元2相对于机架4锁定在维护位置中。此外,支承框架3具有引导元件20,该引导元件在纺纱单元2从操作位置运动到维护位置中以及相反时对其进行引导。如在此所展示的,引导元件例如可以是在引导凹槽中被引导的栓形件。第二锁定元件19在本实施例中被整合在引导元件20中并且仅示意性地展示。因此,第二锁定元件19例如可以是咬合元件,该咬合元件在纺纱单元2处于维护位置时锁止引导元件20的栓形件。
31.纺纱单元2为了监测位置而具有位置传感器21。位置传感器21在此监测纺纱单元2是否如在此所展示地处于维护位置或者是否如图1所展示地处于操作位置。也可以设想监测在这两个位置之间的运动。
32.此外,纺纱单元2具有驱动元件22,借助于该驱动元件在纺纱单元2从操作位置运动到维护位置和/或相反时对其进行驱动。驱动元件22在此支撑在机架4上。在此,例如可以是线性驱动器。同样可以设想的是,除了驱动元件22之外或替代于此,纺纱单元2具有阻尼元件23,以对纺纱单元的运动加阻尼。
33.图3和图4分别示出了根据一个替代性实施例的喷气纺纱机的工位1的示意性侧视图。在图3中示出了处于操作位置下的纺纱单元2并且在图4中示出了处于维护位置下的纺纱单元。与图1和图2的实施例相比,在图3和图4的实施例中控制单元14在纺纱单元2运动(尤其枢转)时静止或并不与其一起运动。因此,一起枢转的构件是牵伸装置6、喷气纺纱喷嘴7以及品质传感器13。在此也可设想的是,除了品质传感器13之外或替代于此,使纱线监测器12一起枢转。控制单元14在此间接或直接布置在机架4处。
34.与图1和图2的实施例类似地,机架4在此也可以具有凹口15。由此,控制单元14和/或联接元件16可以穿过机架4突出并且在图3所示的操作位置中与纺纱单元2处于操作性连接。由于控制单元14在所示出的实施例中并没有一起枢转,因此尤其与图1和图2的实施例的相比,凹口15可以设计得较小。
35.为了将工位1的供应线路与纺纱单元2连接,在图3和图4的实施例中联接元件16被布置在凹口15的区域中。除了联接元件16之外,如前面已经描述地,控制单元14为了将工位
1与纺纱单元2连接而穿过凹口15突出。同样可设想的是,仅联接元件16或控制单元14被设计为将工位1与纺纱单元2连接。由此,不被设计为用于将工位1与纺纱单元2连接的控制单元14或联接元件16可以尤其完全地被布置在机架4内。
36.本发明并不局限于所展示及所描述的实施例。在专利权利要求的范围内的变体与特征的组合一样同样可以实现,即使这些特征在不同的实施例中进行了展示和说明。
37.附图标记清单
[0038]1ꢀꢀ
工位
[0039]2ꢀꢀ
纺纱单元
[0040]3ꢀꢀ
支承框架
[0041]4ꢀꢀ
机架
[0042]5ꢀꢀ
纤维带
[0043]6ꢀꢀ
牵伸装置
[0044]7ꢀꢀ
喷气纺纱喷嘴
[0045]8ꢀꢀ
纱线
[0046]9ꢀꢀ
抽出装置
[0047]
10 卷绕单元
[0048]
11 线轴
[0049]
12 纱线监测器
[0050]
13 品质传感器
[0051]
14 控制单元
[0052]
15 凹口
[0053]
16 联接元件
[0054]
17 铰接件
[0055]
18 第一锁定元件
[0056]
19 第二锁定元件
[0057]
20 引导元件
[0058]
21 位置传感器
[0059]
22 驱动元件
[0060]
23 阻尼元件