1.本发明涉及空气调节技术领域,特别涉及一种空调器的导风板控制方法、计算器可读存储介质、空调器以及空调器的导风板控制装置。
背景技术:
2.相关技术的空调器中在导风板转动过程中,通过遥控器对大旋转结构导风板进行风向可视化操作,对可旋转角度划分5区,并对5个角度/方向进行出风控制。
3.相关技术中,五区划分是根据角度的大小进行均匀划分,往复运动。由于有效角度分布在上区和下区,中间的角度为无效出风角度,所以5区无法均匀划分。对大旋转结构导风板,按照旋转循序划分,为面向空调内部,造成用户体验不佳。
技术实现要素:
4.本发明第一方面在于提出一种空调器的导风板控制方法,提供了一种新的导风板转动角度的可视化划分方式。
5.本发明第二方面在于提出一种计算机可读存储介质。
6.本发明第三方面在于提出一种空调器。
7.本发明第四方面在于提出一种空调器的导风板控制装置。
8.根据本发明第一方面的空调器的导风板控制方法,所述导风板的摇摆范围包括第一控制区、第二控制区和第三控制区,所述第三控制区位于所述第一控制区和所述第二控制区之间,所述第一控制区具有第一下限边界和第一上限边界,所述第二控制区具有第二下限边界和第二上限边界,所述第一下限边界和所述第二上限边界之间限定出所述第三控制区,所述控制方法包括:获取风向可视化指令;获取所述导风板在所述第一控制区的第一下限边界的第一下限角度和第一上限边界的第一上限角度,以及获取所述导风板在所述第二控制区的第二下限边界的第二下限角度和第二上限边界的第二上限角度;根据所述风向可视化指令、所述第一下限角度、第一上限角度、第二下限角度、第二上限角度确定所述导风板的目标角度,所述目标角度位于所述第一控制区或第二控制区;控制所述导风板移动至所述目标角度。
9.根据本发明实施例的空调器的导风板控制方法,提供了一种新的导风板转动角度的可视化划分方式。
10.另外,根据本发明上述实施例的空调器的导风板控制方法,还可以具有如下附加的技术特征:
11.可选地,根据所述风向可视化指令、所述第一下限角度、第一上限角度、第二下限角度、第二上限角度确定所述导风板的目标角度,包括:根据所述第一控制区的第一下限角度和第一上限角度对所述第一控制区进行百分比划分,根据所述第二控制区的第二下限角度和第二上限角度对所述第二控制区进行百分比划分;根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取所述导风板的目标角度。
12.可选地,根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取所述导风板的目标角度,包括:如果所述风向可视化指令对应于第一控制区划分的第一百分比,则根据如下公式计算所述目标角度:所述目标角度=(第一上限角度-第一下限角度)*第一百分比+第一下限角度;如果所述风向可视化指令对应于第二控制区划分的第二百分比,则根据如下公式计算所述目标角度:所述目标角度=(第二上限角度-第二下限角度)*第二百分比+第二下限角度。
13.可选地,所述第三控制区包括关闭位置,所述导风板在所述关闭位置关闭空调器的出风口,其中,所述控制方法还包括:如果风向可视化指令为所述导风板从所述第一下限边界转动至所述第二上限边界,则控制所述导风板从所述第一下限边界沿从第一下限边界到第一上限边界的转动方向转动至所述第二上限边界,以避开所述第三控制区。
14.可选地,所述第三控制区为非有效送风区。
15.根据本发明第二方面的计算机可读存储介质,其上存储有空调器的导风板控制程序,该空调器的导风板控制程序被处理器执行时实现如前述的空调器的导风板控制方法。
16.根据本发明第三方面的空调器,所述空调器包括存储器、处理器及存储在存储器上并可在处理器上运行的空调器的导风板控制程序,所述处理器执行所述导风板控制程序时实现如前述的空调器的导风板控制方法。
17.根据本发明第四方面的空调器的导风板控制装置,所述导风板的摇摆范围包括第一控制区、第二控制区和第三控制区,所述第三控制区位于所述第一控制区和所述第二控制区之间,所述第一控制区具有第一下限边界和第一上限边界,所述第二控制区具有第二下限边界和第二上限边界,所述第一下限边界和所述第二上限边界之间限定出所述第三控制区,所述导风板控制装置包括:控制模块,用于获取风向可视化指令,获取所述导风板在所述第一控制区的第一下限边界的第一下限角度和第一上限边界的第一上限角度,以及获取所述导风板在所述第二控制区的第二下限边界的第二下限角度和第二下限边界的第二上限角度,以及根据所述风向可视化指令、所述第一下限角度、第一上限角度、第二下限角度、第二上限角度确定所述导风板的目标角度,所述目标角度位于所述第一控制区或第二控制区,以及控制所述导风板移动至所述目标角度。
18.可选地,所述控制模块在根据所述风向可视化指令、所述第一下限角度、第一上限角度、第二下限角度、第二上限角度确定所述导风板的目标角度时,还用于:根据所述第一控制区的第一下限角度和第一上限角度对所述第一控制区进行百分比划分,根据所述第二控制区的第二下限角度和第二上限角度对所述第二控制区进行百分比划分;根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取所述导风板的目标角度。
19.可选地,所述控制模块在根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取所述导风板的目标角度时,还用于:如果所述风向可视化指令对应于第一控制区划分的第一百分比,则根据如下公式计算所述目标角度:所述目标角度=(第一上限角度-第一下限角度)*第一百分比+第一下限角度;如果所述风向可视化指令对应于第二控制区划分的第二百分比,则根据如下公式计算所述目标角度:所述目标角度=(第二上限角度-第二下限角度)*第二百分比+第二下限角度。
20.可选地,所述第三控制区包括关闭位置,所述导风板在所述关闭位置关闭空调器
的出风口,其中,所述控制模块还用于:如果风向可视化指令为所述导风板从所述第一下限边界转动至所述第二上限边界,则控制所述导风板从所述第一下限边界沿从第一下限边界到第一上限边界的转动方向转动至所述第二上限边界,以避开所述第三控制区。
21.可选地,所述第三控制区为非有效送风区。
附图说明
22.图1是本发明一个实施例的空调器的导风板在不同位置的示意图。
23.图2是本发明一个实施例的空调器的导风板在不同位置的示意图。
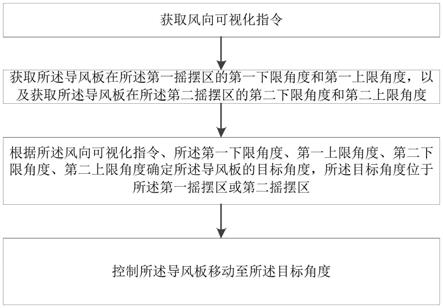
24.图3是本发明一个实施例的空调器的导风板控制方法的流程示意图。
25.图4是本发明一个实施例的空调器的示意图,其中,导风板处于向上导风的极限位置。
26.图5是本发明一个实施例的空调器的示意图,其中,导风板处于关闭位置。
27.图6是本发明一个实施例的空调器的示意图,其中,导风板处于向下导风的极限位置。
28.图7是本发明一个实施例的空调器的导风板控制方法的流程示意图。
29.图8是本发明一个实施例的空调器的导风板控制方法的流程示意图。
30.图9是本发明一个实施例的空调器的导风板控制装置的示意图。
具体实施方式
31.通过遥控器对大旋转结构导风板进行风向可视化操作,对可旋转角度划分5区,并对5个角度/方向进行出风控制。在导风板的转动过程中,导风板的有效角度分布在上区(第一控制区)和下区(第二控制区),中间的角度为无效出风角度,所以五区均匀划分会造成导风板转动至无效出风角度,从而影响出风,尤其是对于大角度旋转的导风板结构,对出风的影响尤为明显,对此,本技术提供了一种对初逢坂的旋转角度进行重新划分的方式,并采用新的方式确定导风板的转动角度。
32.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
33.结合图1和图2,本发明中的导风板的摇摆范围包括第一控制区、第二控制区和第三控制区,第三控制区位于第一控制区和第二控制区之间。
34.可选地,如图1为本发明一个实施例中导风板的各个位置的示意图,其中,位置a、位置b、位置c、位置d分别为导风板在第一控制区和第二控制区的几个极限位置,其中,第一控制区处于位置a和位置b之间,而位置a为第一控制区的下限边界,位置b为第一控制区的上限边界;第二控制区处于位置c和位置d之间,而位置c为第二控制区的下限边界,位置d为第二控制区的上限边界;另外,位置d和位置a之间的区域为第三控制区,也就是说,第一下限边界和第二上限边界之间限定出第三控制区。
35.结合图1和图2,第一控制区的下限位置与第三控制区的上限位置重合、第二控制区的上限位置与第三控制区的下限位置重合,可以提高对导风板的控制精度。但需要说明的是,图1和图2示出的方案仅仅是本发明的一个具体实施方式,并非是对本发明保护范围
的限制。例如,第一控制区与第三控制区之间可能存在重合的区域,第一控制区和第三控制区也可以为分隔开的形式,也就是说,第一控制区的下限位置和第三控制区的上限位置也可以不重合;同样地,第二控制区与第三控制区之间可能存在重合的区域,第二控制区和第三控制区也可以为分隔开的形式,也就是说,第二控制区的上限位置和第三控制区的下限位置也可以不重合。
36.如图3,根据本发明第一方面的空调器的导风板控制方法,导风板的摇摆范围包括第一控制区、第二控制区和第三控制区,第三控制区位于第一控制区和第二控制区之间。控制方法包括:
37.获取风向可视化指令,风向可视化指令是指导风板的角度控制指令,其中,风向可视化指令可以来自于空调器系统指令、也可以为空调器的外部指令、或者空调器的系统指令与空调器的外部指令的共同作用等,例如空调器在运行某一种(例如定向送风、摇摆送风等)需要设置导风板的角度的指令时,导风板移动至预定位置。另外,导风板也可以基于外部指令(例如云平台指令、遥控指令等等)移动。
38.获取导风板在第一控制区的第一下限角度和第一上限角度,以及获取导风板在第二控制区的第二下限角度和第二上限角度。其中,导风板在第一控制区的第一下限角度,即导风板在位置a时的角度;导风板在第一控制区的第一上限角度,即导风板在位置b时的角度;导风板在第二控制区的第二下限角度,即导风板在位置c时的角度;导风板在第二控制区的第二上限角度,即导风板在位置d时的角度。其中,第一下限角度为导风板在第一控制区的第一下限边界处的角度,第一上限角度为导风板在第一控制区的第一上限边界处的角度,第二下限角度为导风板在第二控制区的第二下限边界处的角度,第二上限角度为导风板在第二控制区的第二上限边界处的角度。
39.另外,第一下限角度、第一上限角度具有相同的参照,例如将第一下限角度设为0
°
,第一上限角度即位置b相对于位置a的角度;第二下限角度、第二上限角度具有相同的参照,例如将第二下限角度设为0
°
,第二上限角度即位置d相对于位置c的角度。当然,第一下限角度、第一上限角度、第二下限角度和第二上限角度可以具有相同的参照,例如,将第一下限角度、第一上限角度、第二下限角度和第二上限角度设为从下到上依次增大。当然,第一下限角度、第一上限角度的参照与第二下限角度和第二上限角度的参照也可以不相同。
40.根据风向可视化指令、第一下限角度、第一上限角度、第二下限角度、第二上限角度确定导风板的目标角度,目标角度位于第一控制区或第二控制区,也就是说,将第一控制区和第二控制区进行划分,而将目标角度设置在第一控制区或第二控制区。控制导风板移动至目标角度。
41.根据本发明实施例的空调器的导风板控制方法,在接收到导风板的风向可视化指令时,会将导风板移动到第一控制区和第二控制区内,提供了一种新的导风板转动角度的可视化划分方式,从而可以方便导风板的送风,有效地提高了空调器的出风量,并可以降低导风板上出现凝露的风险,并实现了降噪和节能环保。
42.本发明中的导风板的控制方法适用于不同类型的空调器,例如移动空调、柜式空调、挂式空调、窗式空调等。而根据空调器在制热、制冷以及送风等工作模式下,导风板在不同位置的导风情况,选择第一控制区、第二控制区以及第三控制区的范围。以具有大角度摇摆导风板的空调器为例,导风板可以在较大范围内进行摇摆,然后将导风板的摇摆范围划
分为第一控制区、第二控制区以及第三控制区。
43.具体而言,参照图4至图6,在本发明的一个具体实施例的空调器100中,空调器100具有外壳10、风机20、室内换热器30、导风板40,外壳10内具有风道101,风机20设于风道101内以驱动气流从风道101的入口102流向风道101的出口103,室内换热器30设于外壳10内,且气流在从风道101的入口102流向风道101的出口103的过程中,可以与室内换热器30进行换热,导风板40设置于风道101的出口103处,可以通过导风板40实现向上、向下或其他方向的导风,其中,可以将导风板40向上导风的区域作为导风板40的第一控制区,其中,可以将导风板40向上导风的最大角度位置作为导风板40的第二控制区的下限位置(位置c),将导风板40向上导风的最小角度的位置作为导风板40的第二控制区的上限位置(位置d)。可以将导风板40向下导风的区域作为导风板40的第一控制区,其中,可以将导风板40向下导风的最小角度位置作为导风板40的第一控制区的下限位置(位置a),将导风板40向下导风的最大角度的位置作为导风板40的第一控制区的上限位置(位置b)。
44.其中,可以根据导风板的旋转角度确定导风板所处的位置,例如,根据初始角度的选择,确定导风板在第二控制区的下限位置所对应的角度、第二控制区的上限位置所对应的角度、第一控制区的下限位置所对应的角度、第一控制区的上限位置所对应的角度,其中,第二控制区的下限位置所对应的角度、第二控制区的上限位置所对应的角度、第一控制区的下限位置所对应的角度、第一控制区的上限位置所对应的角度逐渐增大。
45.具体而言,在图4至图6示出的方案中,导风板可以在180
°
(或其他角度)的范围内进行大角度的旋转,以导风板在向上导风时的下限位置(第二控制区的下限位置)作为导风板的旋转起点(如图4所示),也就是说,将导风板在图4中的位置作为参考位置(可以认为导风板的角度为0
°
)。另外,在图5中,导风板旋转至关闭出风口的位置。在图6中导风板旋转至向下导风的最大角度位置,此时导风板处于第一控制区的上限位置(即位置b),此时,导风板可以进行向下导风。
46.其中,可以将导风板在第二控制区的下限位置(位置c)设为0
°
,第一控制区的上限位置(位置b)为180
°
,而将导风板第二控制区的上限位置(位置d)设为40
°
、第一控制区的下限位置(位置a)设为120
°
。
47.当然,上述以第一控制区的下限位置为0
°
、以第二控制区的上限位置为导风板的最大摇摆角度等为例进行说明,仅仅是为了方便理解而本技术的技术方案,并非是对本发明保护范围的限制。
48.可选地,如图7,根据风向可视化指令、第一下限角度、第一上限角度、第二下限角度、第二上限角度确定导风板的目标角度,包括:根据第一控制区的第一下限角度和第一上限角度对第一控制区进行百分比划分,根据第二控制区的第二下限角度和第二上限角度对第二控制区进行百分比划分,也就是说,将第一控制区中从第一下限角度到第一上限角度进行划分、将第二控制区中从第二下限角度到第二上限角度进行划分,例如,将第一下限角度到第一上限角度进行划分为从0到100%,将第二控制区中从第二下限角度到第二上限角度进行划分,例如,将第二下限角度到第二上限角度进行划分为从0到100%。根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取导风板的目标角度。从而可以快速地确定导风板的位置,提高导风板的定位效率,实现导风板的快速的定位,并可以将导风板在第一控制区和第二控制区进行分别划分,提高导风效果。
49.当然,也可以将导风板的整个控制区进行百分比划分,然后进行导风板位置的确定,本发明主要以对第一控制区和第二控制区进行分别划分为例进行说明,但这并非是对本发明保护范围的限制。
50.可选地,根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取导风板的目标角度,包括:如果风向可视化指令对应于第一控制区划分的第一百分比,则根据如下公式计算目标角度:目标角度=(第一上限角度-第一下限角度)*第一百分比+第一下限角度;如果风向可视化指令对应于第二控制区划分的第二百分比,则根据如下公式计算目标角度:目标角度=(第二上限角度-第二下限角度)*第二百分比+第二下限角度。
51.例如,以附图2中位置1、位置2、位置3、位置4、位置5对第一控制区和第二控制区进行划分为例进行说明,其中,位置1、位置2、位置3位于第一控制区,位置4、位置5位于第二控制区,具体而言,
52.如图2所示,第一控制区的可视化分区角度包括可视化角度1,可视化角度2,可视化角度3
53.可视化角度1为第一控制区(上区摇摆角度)的100%角度值对应角度,对应角度值计算方式为:(第一上限角度-第一下限角度)*100%+第一下限角度;
54.可视化角度2为第一控制区(上区摇摆角度)的50%角度值对应角度,所述对应角度值计算方式为:(第一上限角度-第一下限角度)*50%+第一下限角度;
55.可视化角度3为第一控制区(上区摇摆角度)的1%角度值对应角度,所述对应角度值计算方式为:(第一上限角度-第一下限角度)*1%+第一下限角度。
56.另外,第二控制区的可视化分区角度包括可视化角度4,可视化角度5
57.可视化角度4为第二控制区(下区摇摆角度)的100%角度值对应角度,所述对应角度值计算方式为:(第二上限角度-第二下限角度)*100%+第二下限角度;
58.可视化角度5为第二控制区(下区摇摆角度)的1%角度值对应角度,所述对应角度值计算方式为:(第二上限角度-第二下限角度)*1%+第二下限角度。
59.其中,可视化角度1为导风板在位置1对应的角度,可视化角度2为导风板在位置2对应的角度,可视化角度3为导风板在位置3对应的角度,可视化角度4为导风板在位置4对应的角度,可视化角度5为导风板在位置5对应的角度。
60.根据上述导风板角度的确定方式,可以进一步提高导风板的定位效率,实现导风板的快速定位,而且可以有效地提高送风效率和效果,提高室内的舒适性。
61.需要说明的时,在上述导风板角度的确定方式中,可以将导风板控制区内的任意位置作为导风板的角度参考(即导风板位于0
°
时的位置),例如,将上述的位置5中的任一位置作为导风板的0
°
参考位。
62.可选地,如图2,第三控制区包括关闭位置,导风板在关闭位置关闭空调器的出风口,其中,控制方法还包括:如果风向可视化指令为导风板从第一下限边界转动至第二上限边界,则控制导风板从第一下限边界沿从第一下限边界到第一上限边界的转动方向转动至第二上限边界,以避开第三控制区。
63.可选的,如图2,根据可视化控制指令,运动循序可视化角度1-》可视化角度2-》可视化角度3-》可视化角度4-》可视化角度5;在可视化角度3运动到可视化角度4时,根据大旋
转结构导风板运动特征需要与可视化角度1-》可视化角度2-》可视化角度3运动循序相反的方向运动到可视化角度4;参照附图,导风板在第一控制区内可以沿着顺时针方向从位置1
→
位置2
→
位置3进行移动;导风板在第二控制区内可以沿着顺时针方向从位置4
→
位置4进行移动;而在导风板需要从位置3到达位置4时,将会沿着逆时针方向从位置3移动到位置4。
64.另外,所述第三控制区为非有效送风区。其中,空调器在使用过程中,导风板在第一控制区可以实现向下导风,导风板在第二控制区可以实现向上导风,但是,如果导风板设置在第三控制区内,由于此时导风板遮挡出风口,可能会造成正常出风量减小,甚至出现凝露风险,以及噪音超标问题。因此,本发明中将第三控制区设置为非有效送风去,可以提高空调器的送风量,提高能效、降低噪音并减少凝露风险。
65.如图8,在本发明的一个具体实施例中,本空调器的导风板控制方法包括如下步骤:
66.步骤1、接收风向可视化指令;
67.步骤2、将导风板转动角度范围分为上区摇摆角度(第一控制区)、非有效送风角度(第三控制区)、下区摇摆角度(第二控制区);
68.步骤3、获取上区摇摆上限角度(第一上限角度)、上区摇摆下限角度(第一下限角度);获取下区摇摆上限角度(第二上限角度)、下区摇摆下限角度(第二下限角度);
69.步骤4、根据上区摇摆上下限角度进行百分比划分;根据下区摇摆上下限角度进行百分比划分;
70.步骤5、接收上区风向可视化区域角度值,并根据区域角度值和预设角度百分比对应关系,获取导风板运动的目标角度;接收下区风向可视化区域角度值,并根据区域角度值和预设角度百分比对应关系,获取导风板运动的目标角度。
71.根据本发明实施例的空调器的导风板控制方法,解决可视化分区面向用户出风的功能需求,解决大旋转结构导风板上区摇摆可视化区域划分和可视化角度区域划分运动方式。
72.根据本发明第二方面的计算机可读存储介质,其上存储有空调器的导风板控制程序,该空调器的导风板控制程序被处理器执行时实现如前述的空调器的导风板控制方法。
73.本发明实施例的计算机可读存储介质,在其上存储的与上述实施例的空调器的导风板控制程序相对应的空调器的辐射控制程序被处理器执行时,能够保证导风板停止在较为合适的位置,有效地提高送风效果和效率,保证空调器的出风量,避免或减少凝露、高噪音等问题的出现,提高了室内环境的舒适性。
74.如图4至图6,根据本发明第三方面的空调器,空调器包括存储器、处理器及存储在存储器上并可在处理器上运行的空调器的导风板控制程序,处理器执行导风板控制程序时实现如前述的空调器的导风板控制方法。
75.根据本发明实施例的空调器,在接收到导风板的风向可视化指令时,会将导风板移动到第一控制区和第二控制区内,提供了一种新的导风板转动角度的可视化划分方式,从而可以方便导风板的送风,有效地提高了空调器的出风量,并可以降低导风板上出现凝露的风险,并实现了降噪和节能环保。
76.本发明中的导风板的控制方法适用于不同类型的空调器,例如移动空调、柜式空调、挂式空调、窗式空调等。而根据空调器在制热、制冷以及送风等工作模式下,导风板在不
同位置的导风情况,选择第一控制区、第二控制区以及第三控制区的范围。以具有大角度摇摆导风板的空调器为例,导风板可以在较大范围内进行摇摆,然后将导风板的摇摆范围划分为第一控制区、第二控制区以及第三控制区。
77.具体而言,参照图4至图6,在本发明的一个具体实施例的空调器100中,空调器100具有外壳10、风机20、室内换热器30、导风板40,外壳10内具有风道101,风机20设于风道101内以驱动气流从风道101的入口102流向风道101的出口103,室内换热器30设于外壳10内,且气流在从风道101的入口102流向风道101的出口103的过程中,可以与室内换热器30进行换热,导风板40设置于风道101的出口103处,可以通过导风板40实现向上、向下或其他方向的导风,其中,可以将导风板40向上导风的区域作为导风板40的第一控制区,其中,可以将导风板40向上导风的最大角度位置作为导风板40的第二控制区的下限位置(位置c),将导风板40向上导风的最小角度的位置作为导风板40的第二控制区的上限位置(位置d)。可以将导风板40向下导风的区域作为导风板40的第一控制区,其中,可以将导风板40向下导风的最小角度位置作为导风板40的第一控制区的下限位置(位置a),将导风板40向下导风的最大角度的位置作为导风板40的第一控制区的上限位置(位置b)。
78.根据本发明第四方面的空调器的导风板控制装置,导风板的摇摆范围包括第一控制区、第二控制区和第三控制区,第三控制区位于第一控制区和第二控制区之间。第一控制区具有第一下限边界和第一上限边界,第二控制区具有第二下限边界和第二上限边界,第一下限边界和第二上限边界之间限定出第三控制区。
79.如图9,导风板控制装置200包括:控制模块210,用于获取风向可视化指令,获取导风板在第一控制区的第一下限角度和第一上限角度,以及获取导风板在第二控制区的第二下限角度和第二上限角度,根据风向可视化指令、第一下限角度、第一上限角度、第二下限角度、第二上限角度确定导风板的目标角度,目标角度位于第一控制区或第二控制区,控制导风板移动至目标角度。其中,第一下限角度为导风板在第一控制区的第一下限边界处的角度,第一上限角度为导风板在第一控制区的第一上限边界处的角度,第二下限角度为导风板在第二控制区的第二下限边界处的角度,第二上限角度为导风板在第二控制区的第二上限边界处的角度。
80.根据本发明实施例的空调器的导风板控制装置,在接收到导风板的风向可视化指令时,会将导风板移动到第一控制区和第二控制区内,提供了一种新的导风板转动角度的可视化划分方式,从而可以方便导风板的送风,有效地提高了空调器的出风量,并可以降低导风板上出现凝露的风险,并实现了降噪和节能环保。
81.可选地,控制模块在根据风向可视化指令、第一下限角度、第一上限角度、第二下限角度、第二上限角度确定导风板的目标角度时,还用于:根据第一控制区的第一下限角度和第一上限角度对第一控制区进行百分比划分,根据第二控制区的第二下限角度和第二上限角度对第二控制区进行百分比划分。也就是说,将第一控制区中从第一下限角度到第一上限角度进行划分、将第二控制区中从第二下限角度到第二上限角度进行划分,例如,将第一下限角度到第一上限角度进行划分为从0到100%,将第二控制区中从第二下限角度到第二上限角度进行划分,例如,将第二下限角度到第二上限角度进行划分为从0到100%。根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取导风板的目标角度。从而可以快速地确定导风板的位置,提高导风板的定位效率,实现导风板
的快速的定位,并可以将导风板在第一控制区和第二控制区进行分别划分,提高导风效果。
82.当然,也可以将导风板的整个控制区进行百分比划分,然后进行导风板位置的确定,本发明主要以对第一控制区和第二控制区进行分别划分为例进行说明,但这并非是对本发明保护范围的限制。
83.可选地,控制模块在根据风向可视化指令与第一控制区划分的百分比、第二控制区划分的百分比的对应关系获取导风板的目标角度时,还用于:如果风向可视化指令对应于第一控制区划分的第一百分比,则根据如下公式计算目标角度:目标角度=(第一上限角度-第一下限角度)*第一百分比+第一下限角度;如果风向可视化指令对应于第二控制区划分的第二百分比,则根据如下公式计算目标角度:目标角度=(第二上限角度-第二下限角度)*第二百分比+第二下限角度。根据上述导风板角度的确定方式,可以进一步提高导风板的定位效率,实现导风板的快速定位,而且可以有效地提高送风效率和效果,提高室内的舒适性。
84.可选地,第三控制区包括关闭位置,导风板在关闭位置关闭空调器的出风口,其中,控制模块还用于:如果风向可视化指令为导风板从第一下限边界转动至第二上限边界,则控制导风板从第一下限边界沿从第一下限边界到第一上限边界的转动方向转动至第二上限边界,以避开第三控制区。
85.可选的,根据可视化控制指令,运动循序可视化角度1-》可视化角度2-》可视化角度3-》可视化角度4-》可视化角度5;在可视化角度3运动到可视化角度4时,根据大旋转结构导风板运动特征需要与可视化角度1-》可视化角度2-》可视化角度3运动循序相反的方向运动到可视化角度4;参照附图,导风板在第一控制区内可以沿着顺时针方向从位置1
→
位置2
→
位置3进行移动;导风板在第二控制区内可以沿着顺时针方向从位置4
→
位置4进行移动;而在导风板需要从位置3到达位置4时,将会沿着逆时针方向从位置3移动到位置4。
86.另外,所述第三控制区为非有效送风区。其中,空调器在使用过程中,导风板在第一控制区可以实现向下导风,导风板在第二控制区可以实现向上导风,但是,如果导风板设置在第三控制区内,由于此时导风板遮挡出风口,可能会造成正常出风量减小,甚至出现凝露风险,以及噪音超标问题。因此,本发明中将第三控制区设置为非有效送风去,可以提高空调器的送风量,提高能效、降低噪音并减少凝露风险。
87.根据本发明实施例的空调器的导风板控制装置,解决可视化分区面向用户出风的功能需求,解决大旋转结构导风板上区摇摆可视化区域划分和可视化角度区域划分运动方式。
88.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
89.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述
实施例进行变化、修改、替换和变型。