1.本实用新型涉及消防设备技术领域,尤其涉及一种用于消防机器人的取放设备及供水泵车。
背景技术:
2.随着我国经济的发展,重特大火灾的发生日趋增多,情况也越来越复杂,特别是在火灾现场出现易爆有毒的燃烧物时容易危害被困人员及消防人员的生命安全,因此出现了一系列消防机器人来对火灾现场危险区域进行探查、救援和灭火,以此来减少人员伤亡。
3.然而由于现在的消防机器人还不普及,其对应的辅助设备还不完善,在和卸载消防机器人的时候没有专门的工具,造成装载和卸载消防机器人费时费力,容易延误火灾现场的救援时机。
技术实现要素:
4.为此,需要提供一种用于消防机器人的取放设备及供水泵车,解决背景技术所提出的问题。
5.为实现上述目的,本实用新型提供一种用于消防机器人的取放设备,包括底座、横向移动机构、纵向移动机构、支撑机构和托板;
6.所述横向移动机构设置在所述底座上,所述支撑机构设置在所述横向移动机构的移动端上,所述横向移动机构的移动端用于带动支撑机构横向移动;
7.所述托板通过所述纵向移动机构的移动端设置在所述支撑机构上,所述托板用于供消防机器人停放,所述纵向移动机构的移动端用于带动托板纵向移动。
8.进一步地,还包括伸缩轨,所述伸缩轨包括滑动轨道和固定轨道,所述滑动轨道和所述固定轨道传动连接;
9.所述固定轨道设置在所述底座上,所述滑动轨道设置在所述支撑机构上,所述滑动轨道的移动方向平行于所述横向移动机构的移动端的移动方向;或者:
10.所述固定轨道设置在所述支撑机构上,所述滑动轨道设置在所述托板上,所述滑动轨道的移动方向平行于所述纵向移动机构的移动端的移动方向。
11.进一步地,所述滑动轨道和所述固定轨道通过滑轮传动连接。
12.进一步地,所述横向移动机构为两个;
13.两个的横向移动机构的移动端背对设置,每个横向移动机构的移动端均设置一个支撑机构,每个支撑机构均通过所述纵向移动机构连接一个托板。
14.进一步地,所述横向移动机构为伸缩气缸、伸缩油缸或者电动推杆;或者:
15.所述纵向移动机构为伸缩气缸、伸缩油缸或者电动推杆。
16.进一步地,还包括限位机构;
17.所述限位机构设置在所述托板上,所述限位机构用于限制消防机器人的移动。
18.进一步地,所述限位机构包括第一挡板和第二挡板;
19.所述第一挡板和所述第二挡板分别设置在所述托板上,所述第一挡板和所述第二挡板用于设置在取水器机器人的两侧以防止消防机器人发生移动。
20.进一步地,所述限位机构还包括撑杆;
21.所述撑杆的一端铰接在所述第一挡板上,所述撑杆的另一端用于设置在所述托板上;或者:
22.所述撑杆的一端铰接在所述第二挡板上,所述撑杆的另一端用于设置在所述托板上。
23.进一步地,还包括疏水槽;
24.所述疏水槽设置在所述托板上,所述疏水槽用于防止托板积水。
25.为实现上述目的,本实用新型还提供一种供水泵车,包括车体、取放设备和消防机器人;
26.所述取放设备设置在所述车体上,所述取放设备为上述任意一项实施例所述的一种用于消防机器人的取放设备;
27.所述消防机器人设置在所述取放设备的托板上。
28.区别于现有技术,上述技术方案中,首先,横向移动机构将支撑机构从底座上移动到外侧;其次,纵向移动机构将置于托板上的消防机器人下放到地面上;再次,纵向移动机构将托板上升至底座的上方;最后,横向移动机构将支撑机构移动回底座内侧。如此,整个装载过程省时省力,方便迅速,能快速完成消防机器人的装卸工作,为消防火场救援争取时间。
附图说明
29.图1为本实施例中取放设备下放消防机器人的结构示意图;
30.图2为本实施例中取放设备回收到底座上的结构示意图;
31.图3为本实施例中支撑机构的结构示意图;
32.图4为本实施例中限位机构的结构示意图;
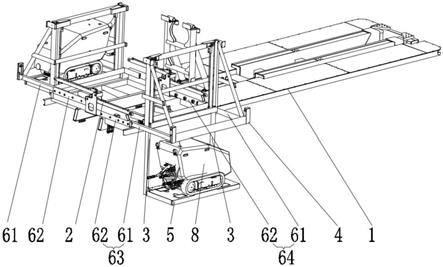
33.图5为本实施例中供水泵车的结构侧视示意图;
34.图6为本实施例中供水泵车的结构俯视示意图。
35.附图标记说明:
36.1、底座;
37.11、疏水槽;12、支撑件;
38.2、横向移动机构;
39.3、纵向移动机构;
40.4、支撑机构;
41.41、第一连接杆;42、第二连接杆;43、第三连接杆;44、第一直撑;
42.45、第二直撑;46、第一斜撑;47、第二斜撑;
43.5、托板;
44.6、伸缩轨;
45.61、滑动轨道;62、固定轨道;63、第一伸缩轨;64、第二伸缩轨;
46.7、限位机构;
47.71、限位槽;72、撑杆;73、第一挡板;74、第二挡板;
48.8、消防机器人;
49.9、车体。
具体实施方式
50.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
51.请参阅图1至图6,本实施例提供一种用于消防机器人的取放设备,包括底座1、横向移动机构2、纵向移动机构3、支撑机构4和托板5。所述横向移动机构2设置在所述底座1上,所述支撑机构4设置在所述横向移动机构2的移动端上,所述横向移动机构2的移动端用于带动支撑机构4横向移动。所述托板5通过所述纵向移动机构3的移动端设置在所述支撑机构4上,所述托板5用于供消防机器人8停放,所述纵向移动机构3的移动端用于带动托板5纵向移动。
52.上述技术方案中,首先,横向移动机构将支撑机构从底座上移动到外侧;其次,纵向移动机构将置于托板上的消防机器人下放到地面上,结构如图1所示;再次,纵向移动机构将托板上升至底座的上方;最后,横向移动机构将支撑机构移动回底座内侧,结构如图2所示。如此,整个装载过程省时省力,方便迅速,能快速完成消防机器人的装卸工作,为消防火场救援争取时间。
53.需要说明的是,一般来说,所述横向平行于水平面,所述纵向垂直于水平面。
54.在本实施例中,所述横向移动机构2为伸缩气缸、伸缩油缸或者电动推杆。在此以伸缩油缸的横向移动机构2为例进行说明:所述伸缩油缸包括缸体、活塞和活塞杆;所述缸体设置在所述底座1上;所述活塞可移动地设置在所述缸体中;所述活塞杆为所述横向移动机构2的移动端,即所述支撑机构4设置在所述活塞杆的另一端上;所述活塞杆的一端设置在所述活塞上,所述活塞杆的另一端伸出所述缸体外;活塞杆可以在缸体中往复移动,以实现横向移动机构2的移动功能,如此横向移动机构2便能将支撑机构4从底座内侧移动至底座外侧,以及将支撑机构4从底座外侧移动至底座内侧。
55.在本实施例中,所述纵向移动机构3为伸缩气缸、伸缩油缸或者电动推杆。在此以伸缩油缸的纵向移动机构3为例进行说明:所述伸缩油缸包括缸体、活塞和活塞杆;所述缸体设置在所述支撑机构4上;所述活塞可移动地设置在所述缸体中;所述活塞杆为所述纵向移动机构3的移动端,即所述支撑机构4设置在所述活塞杆的另一端上;所述活塞杆的一端设置在所述活塞上,所述活塞杆的另一端伸出所述缸体外;活塞杆可以在缸体中往复移动,以实现纵向移动机构3的移动功能,如此纵向移动机构3便能将托板5向远离支撑机构4的方向移动,以及再将托板5移动回支撑机构4中。
56.请参阅图1和图2,在本实施例中,为了维持横向移动机构2的移动端在移动时的稳定性,取放设备还包括伸缩轨6。所述伸缩轨6包括滑动轨道61和固定轨道62,所述滑动轨道61和所述固定轨道62传动连接。需要说明的是,滑动轨道61和固定轨道62可以通过滑轮、滚珠或者滑块相传动连接,或者滑动轨道61和所述固定轨道62相套接。如此,滑动轨道61可以沿着固定轨道62往复移动。所述固定轨道62设置在所述底座1上,所述滑动轨道61设置在所述支撑机构4上,所述滑动轨道61平行所述横向移动机构2,此时所述滑动轨道的移动方向
平行于所述横向移动机构的移动端的移动方向。当支撑机构4随着横向移动机构2移动时,支撑机构4也在伸缩轨的带动下进行移动。如此,伸缩轨可以保证支撑机构以及托板移动的稳定性,让置于托板上的消防机器人保持平稳,防止消防机器人从托板因颠簸而掉落。
57.请参阅图1和图2,在本实施例中,所述伸缩轨为两个,两个伸缩轨分别为第一伸缩轨63和第二伸缩轨64。所述第一伸缩轨63的滑动轨道61设置在所述支撑机构4的左侧壁上,所述第二伸缩轨64的滑动轨道61设置在所述支撑机构4的右侧壁上。所述第一伸缩轨63的滑动轨道61平行于所述第二伸缩轨64的滑动轨道61。优选的,所述第一伸缩轨63和所述第二伸缩轨64位于同一高度,即所述第一伸缩轨63的滑动轨道61和所述第二伸缩轨64的滑动轨道位于同一高度,所述第一伸缩轨63的固定轨道62和所述第二伸缩轨64的固定轨道62位于同一高度。
58.请参阅图1和图2,在本实施例中,所述横向移动机构2为两个,每个横向移动机构2均设置在所述底座1上。优选的,两个的横向移动机构2的移动端背对设置。每个横向移动机构2的移动端均设置一个支撑机构4,每个支撑机构4均通过所述纵向移动机构3连接一个托板5。需要说明的是,两个支撑机构在供水泵车的宽度上依次排列。需要说明的是,两个横向移动机构2所连接的伸缩轨上下堆叠,例如在图1中,两个固定轨道上下堆叠。
59.在本实施例中,为了提高的稳定性,在支撑机构和托板之间也设置有伸缩轨(即第三伸缩轨),使得托板在升降时可以保持平稳。此时,所述固定轨道设置在所述支撑机构上,所述滑动轨道61设置在所述托板上,结构如图4所示,所述滑动轨道的移动方向平行于所述纵向移动机构的移动端的移动方向。
60.在本实施例中,纵向移动机构为两个,两个的纵向移动机构设置在托板的两端上。需要说明的是,伸缩轨(即第三伸缩轨)也为两个,两个的伸缩轨的滑动轨道均分别设置在托板的两端上即可。如此,托板在升降时具有较好的稳定性。
61.需要说明的是,两个伸缩轨(即第三伸缩轨)中滑动轨道可通过一横杆来加固,在伸缩轨(即第三伸缩轨)的存在时,纵向移动机构的移动端可以设置在托板上、伸缩轨(即第三伸缩轨)的滑动轨道、横杆中的任意一个上。
62.请参阅图4,在本实施例中,为了让消防机器人停放于托板上可以保持稳定,取放设备还包括限位机构7。所述限位机构7设置在所述托板5上,所述限位机构7用于限制消防机器人的移动,使得消防机器人在随着横向移动机构2以及纵向移动机构3的移动时不发生移位,如此可保证消防机器人的安全。
63.请参阅图3,在本实施例中,为了防止消防机器人前后移动,所述限位机构7包括第一挡板73和第二挡板74。所述第一挡板73和所述第二挡板74分别设置在所述托板5上,所述第一挡板73和所述第二挡板74用于设置在取水器机器人的两侧以防止消防机器人发生移动。需要说明的是,第一挡板73和第二挡板74可以固定消防机器人的车身,或者第一挡板73和第二挡板74可以固定消防机器人的轮子,使得消防机器人无法前后移动。
64.请参阅图3和图4,在本实施例中,所述第一挡板73铰接在托板5上,第一挡板73以铰接点向上转动或者向下转动。当控制第一挡板73以铰接点向上转动时,第一挡板73突出托板5的表面,如此对消防机器人进行限位;当控制第一挡板73以铰接点向下转动时,第一挡板73的上表面可以与托板5的上表面齐平,方便消防机器人通行。需要说明的是,第一挡板73的转动可以手动来转动,也可以通过控制机构来驱动。
65.请参阅图3和图4,同理,所述第二挡板74铰接在托板5上,第二挡板74以铰接点向上转动或者向下转动。当控制第二挡板74以铰接点向上转动时,第二挡板74突出托板5的表面,如此对消防机器人进行限位;当控制第二挡板74以铰接点向下转动时,第二挡板74的上表面可以与托板5的上表面齐平,方便消防机器人通行。需要说明的是,第二挡板74的转动可以手动来转动,也可以通过控制机构来驱动。
66.请参阅图4,在本实施例中,当第一挡板73向上转动后,可以利用一个撑杆72支撑在托板上,当需要回收第一挡板73时,可以先取掉撑杆72,然后便可以收回第一挡板。同理,当第二挡板74向上转动后,可以利用一个撑杆72支撑在托板上,当需要回收第二挡板74时,可以先取掉撑杆72,然后便可以收回第二挡板。
67.请参阅图4,在本实施例中,所述撑杆72的一端可以铰接在第一挡板73上,所述撑杆72的一端可以以铰接点转动,所述撑杆72的另一端可以插入到限位槽71中的限位孔里,所述限位槽71为托板5上用于容纳第一挡板73的槽。在限位槽71的旁边还具有连通限位槽71的手部伸入槽,所述手部伸入槽用于操作者的手部伸入其中来转动第一挡板。
68.同理,第二挡板74也具有撑杆72,第二挡板74与撑杆72连接的方式相同于第一挡板73与撑杆72连接的方式,具体可见上文所述。
69.在某些实施例中,所述第一挡板的铰接部位和/或所述第二挡板的铰接部位具有一阻尼器,以提供铰接部位转动时的阻尼感,使得第一挡板和/或第二挡板可以保持一个固定的角度不动。
70.在其他一些实施例中,所述第一挡板和第二挡板可以插入到托板上,即托板上设置供第一挡板或者第二挡板插入的限位槽即可。在回收消防机器人时,先将消防机器人引到托板上,然后将第一挡板和第二挡板插入到两个限位槽中,第一挡板位于消防机器人的一侧(例如车头前方),第二挡板位于消防机器人的另一侧(例如车尾后方);消防机器人需要工作时,拔出第一挡板和第二挡板,消防机器人便可以进行移动。
71.请参阅图3,在本实施例中,为了避免消防机器人停放于托板上时托板发生积水,所述取放设备还包括疏水槽11。所述疏水槽11设置在所述托板5上,一般消防机器人停放于托板5的中部,那么所述疏水槽11设置在所述托板5的中部。所述疏水槽11连通所述托板5的顶部和所述托板5的底部,所述托板5的顶部用于供消防机器人8停放。当消防机器人作业后停放在托板的顶部时,消防机器人表面残留着水经由疏水槽流到取放设备外。
72.请参阅图3和图4,在本实施例中,所述疏水槽11可以具有一个较大的尺寸,使防积水的效果好。当疏水槽的尺寸过大时,为了让消防机器人更好地通行,所述疏水槽的内侧壁上设置支撑件12,支撑件12用于支撑着消防机器人行驶而过。优选的,所述支撑件12的上表面与托板5的上表面相平。所述支撑件12为多个,多个的支撑件12间隔地设置在所述疏水槽11的内侧壁上。需要说明的是,所述支撑件12可以为圆柱状或者方柱状。
73.在本实施例中,所述取放设备还包括控制机构,所述控制机构分别与横向移动机构2、纵向移动机构3、消防机器人8相连接,以提高自动化水平。
74.请参阅图3,在本实施例中,所述支撑机构4为支架的结构。具体的,所述支撑机构4包括第一连接杆41、第二连接杆42、第三连接杆43、第一直撑44、第二直撑45、第一斜撑46和第二斜撑47。所述第一连接杆41和所述第二连接杆42位于同一平面,所述第一连接杆41和所述第二连接杆42相平行,所述第一连接杆41和所述第二连接杆42相对设置。所述第一连
接杆41、所述第二连接杆42、所述第一伸缩轨63的滑动轨道和所述第二伸缩轨64的滑动轨道围成一个停放区域,所述停放区域用于容纳回收上来的托板,即托盘上升的限位为所述停放区域。所述第一直撑44的下部分和所述第二直撑45的下部分设置在所述第一连接杆41的两端上,所述第一直撑44和所述第二直撑45相平行。所述第一直撑44的中上部和所述第二直撑45的中上部之间通过第三连接杆43来加固。所述纵向移动机构3设置在第一直撑44和/或第二直撑45上。所述第一斜撑46连接第二连接杆42和第一直撑44,所述第二斜撑47连接第二连接杆42和第二直撑45,以此对支撑机构进行加固。
75.请参阅图1至图6,本实施例还提供一种供水泵车,包括车体9、取放设备和消防机器人8。所述取放设备设置在所述车体9上,结构如图5和图6所示,所述取放设备为上述任意一项实施例所述的一种用于消防机器人的取放设备,结构如图1至图4所示。所述消防机器人设置在所述取放设备的托板上。消防机器人8是特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用,消防机器人8的进水端可以连接所述供水泵车上的水源,然后消防机器人8便可以独自进入到易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行作业。需要说明的是,所述供水泵车可作为消防车、抢险车使用。
76.优选的,所述底座1设置在所述车体9上,所述底座1不伸出车体9外,如此优化供水泵车的车身宽度。当横向移动机构2在移动支撑机构4时,支撑机构4被移动至车身的外侧,然后纵向移动机构3带动托板下放到地面,使得消防机器人8可以驶向地面,结构如图1所示。
77.请参阅图1,在本实施例中,消防机器人8是通过履带实现移动,履带可以适应不同类型的地面,例如在履带的带动下,消防机器人8可以爬陡坡,越宽壕,涉深水,过田野,而且履带的接地面积比较大,不轻易下陷,在行走过程中能够轻松地通过松软、泥泞的路面。
78.在本实施例中,供水泵车需要承载多个的消防机器人8时,需要多个的支撑机构4以及托板来对消防机器人8进行运输,一个横向移动机构2驱动一个支撑机构4,一个纵向移动机构3驱动一个托板。
79.在本实施例中,所述供水泵车还包括取水装置,所述取水装置包括取水管道和水泵。所述取水管道的进水端设置水泵,所述取水管道的进水端可以插入到水源中进行取水。所述取水管道通过俯仰机构设置在所述车体上,所述俯仰机构用于带动取水管道上仰或者下俯。
80.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型专利的保护范围之内。