1.本实用新型属于灭火装置技术领域,具体涉及基于红外矩阵定位及视觉识别追踪的灭火装置。
背景技术:
2.目前,我国的消防企业大都规模偏小,市场占有率低。龙头企业初步形成,大型企业面临发展机遇。低端市场竞争激烈,产品品种单一,行业平均毛利率不高。高端市场竞争同样激烈,部分企业已开始向系统集成商转型发展。火灾事故是现代社会中一个严重而频发的灾难。据应急管理部统计,我国每年发生的火灾造成了重大人员伤亡和巨大经济损失。作为社会公共安全的关键环节之,消防安全需要不断投入建设。中国经济正处于快速发展阶段,近年来国民生产总值以6%以上的速度增长,对消防产品的需求不断扩大。
3.消防产业与各行各业都有着密切联系,不仅与商业地产相关,更与工业地产、公共建筑、基础设施、市政配套等领域相关。目前,我国消防产品生产已经实现了产业化发展,消防产业成为国民经济发展中日趋活跃的一个重要组成部分,国内消防器材、消防工程及消防装备市场合计超过2000亿元,而且随着新型城镇化的不断推进,全社会消防安全意识提升,以及行业市场化程度提高,消防行业未来10
‑
20年将保持15%
‑
20%的增长。而且目前现有的消防器材公司较少,所以市场空间较广、消费者对其需求量较大,这将给我们的产品发展给予很大的帮助,在一定程度上也拓展了产品的市场。
4.传统的灭火装置在实用时,对热源感知效果不足,难以在火源最微弱时进行扑灭,使得火源疯涨后难以扑灭,且感知火源后难以进行拍摄的问题。
技术实现要素:
5.为解决上述背景技术中提出的问题。本实用新型提供了基于红外矩阵定位及视觉识别追踪的灭火装置,具有便于对火源进行红外感知,且感知后便于对火源进行拍摄的特点。
6.为实现上述目的,本实用新型提供如下技术方案:基于红外矩阵定位及视觉识别追踪的灭火装置,包括顶盖,所述顶盖下表面的中心位置处安装有伺服驼机组件,所述伺服驼机组件旋转轴安装有核心控制器,所述核心控制器的两侧表面固定有连接套管,所述连接套管的内部通过螺栓固定有灭火组件,所述核心控制器的下表面安装有视觉摄像头和红外矩阵模组,且核心控制器分别与伺服驼机组件、灭火组件、视觉摄像头和红外矩阵模组电连接,且核心控制器通过顶盖与外部的电源连接,所述顶盖下表面的边缘处设置有支撑组件。
7.作为本实用新型的基于红外矩阵定位及视觉识别追踪的灭火装置优选技术方案,支撑组件包括竖支杆、横支杆和连接角块,且竖支杆和横支杆均设置有三根,两根横支杆和一根竖支杆之间通过连接角块连接。
8.作为本实用新型的基于红外矩阵定位及视觉识别追踪的灭火装置优选技术方案,
所述连接角块包括三孔连接块,与三孔连接块一体成型的侧护板,与侧护板一体成型的连接板,所述连接角块的表面开设有与竖支杆和横支杆连接的孔。
9.作为本实用新型的基于红外矩阵定位及视觉识别追踪的灭火装置优选技术方案,所述灭火组件设置有两个,两个所述灭火组件通过连接套管固定在核心控制器的两侧。
10.作为本实用新型的基于红外矩阵定位及视觉识别追踪的灭火装置优选技术方案,所述红外矩阵模组由若干个呈矩阵分布的红外二极管组成,且红外矩阵模组呈120度角设置。
11.作为本实用新型的基于红外矩阵定位及视觉识别追踪的灭火装置优选技术方案,所述伺服驼机组件包括呈x轴和y轴设置的两个驼机。
12.与现有技术相比,本实用新型的有益效果是:
13.1、通过伺服驼机组件与顶盖连接的核心控制器,便于核心控制器进行偏转,同时核心控制器通过连接套管固定的灭火组件,核心控制器下表面安装的视觉摄像头和红外矩阵模组,且核心控制器与伺服驼机组件、灭火组件、视觉摄像头和红外矩阵模组电连接,伺服驼机组件带着核心控制器转动后,便于红外矩阵模组对热源进行识别,便于视觉摄像头对热源进行拍摄,便于灭火组件对火源进行灭火,同时顶盖通过支撑组件进行支撑,从而增加灭火组件的稳定性。
14.2、通过由竖支杆、横支杆和连接角块组成的支撑组件,同时竖支杆和横支杆通过连接角块连接,且竖支杆的上端与顶盖固定连接,且竖支杆、横支杆均设置有三根,使得竖支杆、横支杆和连接角块组成的三角支撑组件具有一定的稳定性。
15.3、通过由三孔连接块、侧护板和连接板组成的连接角块,同时三孔连接块表面开设的三个孔,便于三孔连接块分别与两根横支杆以及一根竖支杆连接,同时三孔连接块表面一体成型的侧护板,以及侧护板表面一体成型的连接板,便于侧护板与竖支杆接触,从而增加支撑组件结构的强度。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
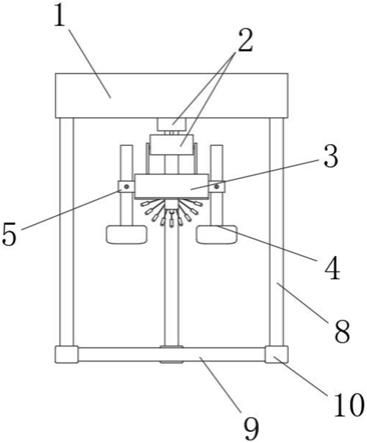
17.图1为本实用新型的结构示意图;
18.图2为本实用新型中的竖支杆、横支杆、连接角块结构示意图;
19.图3为本实用新型中的连接角块结构示意图;
20.图4为本实用新型中的核心控制器、视觉摄像头和红外矩阵模组结构示意图;
21.图5为本实用新型中的流程图;
22.图中:1、顶盖;2、伺服驼机组件;3、核心控制器;4、灭火组件;5、连接套管;6、视觉摄像头;7、红外矩阵模组;8、竖支杆;9、横支杆;10、连接角块;11、三孔连接块;12、侧护板;13、连接板。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.实施例
25.请参阅图1
‑
5,本实用新型提供一种技术方案:基于红外矩阵定位及视觉识别追踪的灭火装置,包括顶盖1,顶盖1下表面的中心位置处安装有伺服驼机组件2,伺服驼机组件2旋转轴安装有核心控制器3,核心控制器3的两侧表面固定有连接套管5,连接套管5的内部通过螺栓固定有灭火组件4,核心控制器3的下表面安装有视觉摄像头6和红外矩阵模组7,且核心控制器3分别与伺服驼机组件2、灭火组件4、视觉摄像头6和红外矩阵模组7电连接,且核心控制器3通过顶盖1与外部的电源连接,顶盖1下表面的边缘处设置有支撑组件。
26.本实施方案中,通过伺服驼机组件2与顶盖1连接的核心控制器3,便于核心控制器3进行偏转,同时核心控制器3通过连接套管5固定的灭火组件4,核心控制器3下表面安装的视觉摄像头6和红外矩阵模组7,且核心控制器3 与伺服驼机组件2、灭火组件4、视觉摄像头6和红外矩阵模组7电连接,伺服驼机组件2带着核心控制器3转动后,便于红外矩阵模组7对热源进行识别,便于视觉摄像头6对热源进行拍摄,便于灭火组件4对火源进行灭火,同时顶盖1通过支撑组件进行支撑,从而增加灭火组件4的稳定性。
27.具体的,支撑组件包括竖支杆8、横支杆9和连接角块10,且竖支杆8 和横支杆9均设置有三根,两根横支杆9和一根竖支杆8之间通过连接角块 10连接,连接角块10包括三孔连接块11,与三孔连接块11一体成型的侧护板12,与侧护板12一体成型的连接板13,连接角块10的表面开设有与竖支杆8和横支杆9连接的孔。
28.本实施例中,通过由竖支杆8、横支杆9和连接角块10组成的支撑组件,同时竖支杆8和横支杆9通过连接角块10连接,且竖支杆8的上端与顶盖1 固定连接,且竖支杆8、横支杆9均设置有三根,使得竖支杆8、横支杆9和连接角块10组成的三角支撑组件具有一定的稳定性,通过由三孔连接块11、侧护板12和连接板13组成的连接角块10,同时三孔连接块11表面开设的三个孔,便于三孔连接块11分别与两根横支杆9以及一根竖支杆8连接,同时三孔连接块11表面一体成型的侧护板12,以及侧护板12表面一体成型的连接板13,便于侧护板12与竖支杆8接触,从而增加支撑组件结构的强度。
29.具体的,灭火组件4设置有两个,两个灭火组件4通过连接套管5固定在核心控制器3的两侧。
30.本实施例中,便于两个灭火组件4对火源进行灭火。
31.具体的,红外矩阵模组7由若干个呈矩阵分布的红外二极管组成,且红外矩阵模组7呈120度角设置。
32.本实施例中,呈120度角设置的红外矩阵模组7便于对热源进行感知。
33.具体的,伺服驼机组件2包括呈x轴和y轴设置的两个驼机。
34.本实施例中,便于伺服驼机组件2带着核心控制器3转动。
35.本实用新型的工作原理及使用流程:支撑组件组装时,两根横支杆9以及一根竖支杆8通过连接角块10连接,同时竖支杆8和横支杆9插入三孔连接块11表面开设的孔内,同时侧护板12与竖支杆8的表面接触,并把竖支杆8的上端与顶盖1连接,工作时,核心控制器3通过顶盖1与外部的电源连接,红外矩阵模组7检测到热源时,红外矩阵模组7上传信号给核心控制器3,此时核心控制器3根据热源信号对伺服驼机组件2下发控制,使得伺服驼机组件2
的输出轴带着核心控制器3转动,使得视觉摄像头6对热源进行拍摄,视觉摄像头6拍摄的画面上传给核心控制器3,使得核心控制器3下发命令给灭火组件4,灭火组件4对火源进行灭火。
36.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。