1.本实用新型涉及消防技术领域,尤其涉及一种智能巡逻消防机器人用火源识别设备。
背景技术:
2.随着我国社会经济的发展,家庭装修越来越豪华,电器种类越来越多,家庭火灾的发生率逐年增加,每年家庭火灾超10万起,占火灾总数超4成,造成的人员伤亡却占到全年火灾伤亡总数的近8成,大部分伤亡人员为老人、未成年人和残疾等弱势群体,家庭火灾损失是近年来对生命财产威胁最大的火灾场景。
3.家庭火灾事故发生时,高温、浓烟、有毒气体等对被困人员和消防救援人员的生命安全构成极大威胁,为社会经济造成重大损失,而现有家庭消防器材多为烟雾传感器、传统灭火器、灭火毯、逃生绳、喷淋系统等需要人工操作、智能化程度低的设备,现有智能消防机器人则主要针对军工行业研发设计,成本高昂、外形粗悍、市场普及率低,不适宜家用,因此,研发出成本低、功能强、经济实用的家用智能消防机器人具有重要意义。
4.为此,我们提出一种智能巡逻消防机器人用火源识别设备来解决上述问题。
技术实现要素:
5.本实用新型的目的是为了解决上述背景提出的问题,而提出的一种智能巡逻消防机器人用火源识别设备。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种智能巡逻消防机器人用火源识别设备,包括支撑架,所述支撑架的顶部一侧安装有感知组件,所述支撑架的顶部安装有plc控制器,所述plc控制器的输出端和外部控制器的输入端通讯连接;
8.所述感知组件包括锁止板和弧形衔接板,所述弧形衔接板为弧形状结构,所述弧形衔接板的一侧安装有火焰识别器,所述火焰识别器为环形状结构,所述火焰识别器的底部连接安装有旋转部件,所述旋转部件的底部安装有摄像机构,所述摄像机构的两侧安装有led灯,所述摄像机构的输入端和火焰识别器的输出端通讯连接,所述火焰识别器和plc控制器通讯连接,所述plc控制器的一侧安装有有喷射管。
9.优选地,所述喷射管的一侧安装有冲射电缸,所述冲射电缸的输出端贯穿喷射管抵接于喷射管内部的一侧,所述喷射管一侧的内部滑动安装有抵接盘,所述喷射管的内部滑动安装有滑动杆,所述滑动杆和抵接盘之间设有大于等于1cm的间隙,所述冲射电缸抵接于抵接盘的一侧。
10.优选地,所述滑动杆的一安装有波纹弹簧,所述波纹弹簧的一侧连接安装有波纹弹簧,所述喷射管一侧内壁的表面开设有弧形流道,所述弧形流道为倾斜弧形状结构。
11.优选地,所述支撑架的顶部安装有喷射管,所述喷射管的顶部安装有水源增压转换阀,所述喷射管的一侧连接安装有输送管,所述输送管的顶部安装有储存腔体;所述输送
管为管状结构,所述输送管的顶部和储存腔体的底部通过电磁阀开合贯穿连接,所述输送管的一侧和喷射管的一侧贯穿连接。
12.优选地,所述支撑架的顶部一侧安装有搬运组件所述搬运组件包括正反电机、传动带和传动盘,所述支撑架的顶部安装有转动座,所述转动座的底部和传动带的一侧相连接,所述转动座的顶部安装有第一连接臂,所述第一连接臂的一侧固定有第二连接臂,所述第一连接臂和第二连接臂为倾斜状结构。
13.优选地,所述第二连接臂的一侧安装有直线电缸,所述直线电缸的输出端;连接安装有夹爪,所述夹爪的数量为对称状结构,所述直线电缸的一侧安装有环形齿,所述夹爪的两侧安装于环形齿的表面。
14.与现有技术相比,本实用新型的有益效果是:
15.1、上述方案,通过设置感知组件中的火焰识别器对着火源的信息进行感知,旋转部件对进行旋转,进行摄像感知,将摄像机构通产生的图像通过plc控制器进行图像火源识别成像进行快速对着火点情况的感知;
16.2、上述方案,通过设置冲射电缸、抵接盘、滑动杆、波纹弹簧、推头和弧形流道对灭火材料进行加压输送,增加运动行程,使远离火源的时候可进行超长度灭火作业,进一步设置水源增压转换阀可和外界水源进行转换,使喷射管转换为水流通道,通过设置搬运组件对阻碍物进行搬运,利用夹爪的两侧安装于环形齿的表面,增加夹爪的转动面积和搬运力度。
附图说明
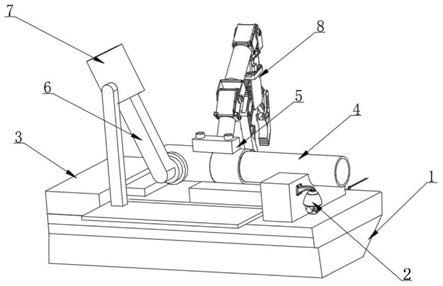
17.图1为本实用新型提出的一种智能巡逻消防机器人用火源识别设备的整体结构示意图;
18.图2为本实用新型提出的一种智能巡逻消防机器人用火源识别设备的感知组件结构示意图;
19.图3为本实用新型提出的一种智能巡逻消防机器人用火源识别设备的喷射管内部结构示意图;
20.图4为本实用新型提出的一种智能巡逻消防机器人用火源识别设备的搬运组件的结构示意图;
21.图5为本实用新型提出的一种智能巡逻消防机器人用火源识别设备的增加搬运行程范围的结构示意图。
22.附图标记:1、支撑架;2、感知组件;3、plc控制器;4、喷射管;5、水源增压转换阀;6、输送管;7、储存腔体;8、搬运组件; 21、锁止板;22、弧形衔接板;23、火焰识别器;24、旋转部件;25、摄像机构;41、冲射电缸;42、抵接盘;43、滑动杆;44、波纹弹簧; 45、推头;46、弧形流道;81、正反电机;82、传动带;83、传动盘; 84、转动座;85、第一连接臂;86、第二连接臂;87、直线电缸;88、夹爪;89、环形齿。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。
24.参照图1-5,一种智能巡逻消防机器人用火源识别设备,包括支撑架1,支撑架1的顶部一侧安装有感知组件2,支撑架1的顶部安装有plc控制器3,plc控制器3的输出端和外部控制器的输入端通讯连接;
25.感知组件2包括锁止板21和弧形衔接板22,弧形衔接板22为弧形状结构,弧形衔接板22的一侧安装有火焰识别器23,火焰识别器23为环形状结构,火焰识别器23的底部连接安装有旋转部件24,旋转部件24的底部安装有摄像机构25,摄像机构25的两侧安装有 led灯,摄像机构25的输入端和火焰识别器23的输出端通讯连接,火焰识别器23和plc控制器3通讯连接,plc控制器3的一侧安装有喷射管4。
26.喷射管4的一侧安装有冲射电缸41,冲射电缸41的输出端贯穿喷射管4抵接于喷射管4内部的一侧,喷射管4一侧的内部滑动安装有抵接盘42,喷射管4的内部滑动安装有滑动杆43,滑动杆43和抵接盘42之间设有大于等于1cm的间隙,产生阶段性力度增递,冲射电缸41抵接于抵接盘42的一侧进行击打。
27.支撑架1的顶部安装有喷射管4,喷射管4的顶部安装有水源增压转换阀5,喷射管4的一侧连接安装有输送管6,输送管6的顶部安装有储存腔体7;输送管6为管状结构,输送管6的顶部和储存腔体7的底部通过电磁阀开合贯穿连接,输送管6的一侧和喷射管4的一侧贯穿连接;
28.滑动杆43的一安装有波纹弹簧44,波纹弹簧44的一侧连接安装有波纹弹簧44,喷射管4一侧内壁的表面开设有弧形流道46,弧形流道46为倾斜弧形状结构,通过冲射电缸41产生巨大的推力抵接于抵接盘42的一侧,抵接盘42将滑动杆43的一侧推动沿波纹弹簧 44和推头45的方向带动灭火弹沿弧形流道46的延伸倾斜方向进行推出,所推出的长度为大于等于2m;
29.根据伯努利定律,流体流速快的地方,其压强就小,反之,压强就更大,因为灭火弹是会旋转的,在旋转的时候就会带动周围的空气一起旋转,由于飞行速度矢量和旋转角速度矢量不部不等,所以就会导致灭火弹两侧的流体流速大小不等;
30.灭火弹是沿着一个能随着速度矢量变化的弧形流道46来自旋的,所以在空气中移动时灭火弹的不同侧面之间不会存在速度差,灭火弹在击发时的会出现章动角,以及在弹道抛物线末端时弹丸的速度矢量变化,产生一个角度偏差,这个角度偏差其实就是旋转的弧形流道46线跟不上速度矢量的变化而产生的,可产生相应的运动;
31.冲射电缸41为大推力伺服电缸,其电气特性为:
32.1、硬质铬钢延伸管;
33.2、任意方向安装;
34.3、滚珠丝杠驱动;
35.4、导向滑块;
36.5、负载可达60000n;
37.6、ip65保护等级。
38.支撑架1的顶部一侧安装有搬运组件8搬运组件8包括正反电机 81、传动带82和传动盘83,支撑架1的顶部安装有转动座84,转动座84的底部和传动带82的一侧相连接,转动座84的顶部安装有第一连接臂85,第一连接臂85的一侧固定有第二连接臂86,第一连接臂
85和第二连接臂86为倾斜状结构,增加一定的调节行程。
39.第二连接臂86的一侧安装有直线电缸87,直线电缸87的输出端;连接安装有夹爪88,夹爪88的数量为对称状结构,直线电缸87 的一侧安装有环形齿89,夹爪88的两侧安装于环形齿89的表面,增加夹爪88的转动面积和搬运力度。
40.本实用新型的工作过程如下:
41.第一步:首先感知组件2中的火焰识别器23对着火源的信息进行感知,旋转部件24对2进行旋转,进行摄像感知,将摄像机构25 通产生的图像通过plc控制器3进行图像火源识别成像,由储存腔体 7内部的电磁阀将储存腔体7内部的灭火弹由输送管6输送至喷射管 4的内部,启动冲射电缸41进行工作,冲射电缸41产生巨大的推力抵接于抵接盘42的一侧,抵接盘42将滑动杆43的一侧推动沿波纹弹簧44和推头45的方向带动灭火弹沿弧形流道46的延伸倾斜方向进行推出,灭火弹遇高温自动引爆,进行初步的急救;
42.第二步:在救援过程中遇到前方有阻挡使,启动正反电机81进行工作,正反电机81的输出端转动通过传动盘83和传动带82带动转动座84进行角度调节,启动直线电缸87进行工作,直线电缸87 的滑动端向一侧伸展带动夹爪88沿环形齿89的表面进行伸展对搬运物体进行宽度适配,最高反向滑动直线电缸87的输出端进行高效的搬运作业。
43.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。