1.本实用新型涉及码垛装置技术领域,具体为一种袋装饲料平整码垛机构。
背景技术:
2.袋装饲料进行码垛,以往的方式均通过人力进行搬运,然后进行码垛,这样传统的方式,造成大量的劳动率,同时码垛出现不均匀、不平整效果,造成后期储藏、托运等不便,另外,码垛时,需要将袋装进行交叉放置,增加码垛的平稳性,为此我们提出一种袋装饲料平整码垛机构用于解决上述问题。
技术实现要素:
3.本实用新型的目的在于提供一种袋装饲料平整码垛机构,以解决上述背景技术中提出的问题。
4.为解决上述技术问题,本实用新型采用如下技术方案:一种袋装饲料平整码垛机构,包括传送带机构,所述传送带机构一端设有纠正机构,所述传送带机构侧面设有滑轨,所述滑轨一端上表面固定安装有控制装置,所述滑轨内安装有水平移动装置,所述滑轨上表面对称开设有第一滑槽,所述第一滑槽之间的滑轨上表面开设有第二滑槽,所述第一滑槽内滑动连接有放置组件,所述放置组件与水平移动装置固定连接,所述放置组件上滑动安装有抓取机构、平整机构,所述抓取机构底端设有置物架。
5.优选地,所述纠正机构包括有固定台,所述固定台上固定安装有第一电机,所述固定台上表面设有底座,所述第一电机输出端贯穿固定台,并固定连接底座底面,所述底座上转动安装有多个导辊。
6.优选地,所述水平移动装置包括有第二电机,所述第二电机外表面固定设有支座,所述支座与放置组件固定连接,所述第二电机输出端活动贯穿滑轨侧面,并固定连接有两个矩形滑块,所述矩形滑块之间的第二电机输出端外表面固定连接有齿轮,所述矩形滑块滑动设于第一滑槽内,所述齿轮滑动设于第二滑槽内,所述齿轮啮合连接有齿板,所述齿板固定设于第二滑槽内底面。
7.优选地,所述放置组件包括有第二气缸,所述第二气缸底端固定连接有滑座,所述滑座底面固定连接矩形滑块上表面,所述滑座上开设有第二十字滑槽、安装槽,所述第二十字滑槽内滑动连接有第三十字滑块,所述安装槽内固定安装有第三气缸,所述第三气缸活塞杆与第三十字滑块底端固定连接,所述第三十字滑块与平整机构固定连接,所述滑座侧面固定设有滑板,所述滑板上表面开设有凸形滑槽,所述凸形滑槽内滑动连接有z形连接块,所述z形连接块上开设有第五滑槽、凸形转槽,所述第二气缸活塞杆固定设有圆形挡块,所述圆形挡块滑动卡接第五滑槽两侧,所述z形连接块外侧与第三十字滑块内侧固定连接,所述z形连接块上表面与抓取机构固定连接。
8.优选地,所述抓取机构包括有第一气缸、导块,所述第一气缸底端固定连接z形连接块上表面,所述第一气缸活塞杆固定设有圆块,所述圆块上对称转动铰接有拉杆,所述拉
杆设于凸形转槽内,所述拉杆底端转动铰接有第一十字滑块,所述导块上表面开设有第一十字滑槽,所述第一十字滑块滑动连接于第一十字滑槽内,所述第一十字滑块底端固定设有固定轴,所述固定轴外表面固定设有多个弧形爪。
9.优选地,所述平整机构包括有l形杆,所述l形杆上表面固定连接第三十字滑块侧面,所述l形杆侧面固定连接有转轴,所述转轴外表面转动连接有压辊。
10.与现有技术相比,本实用新型的有益效果在于:
11.1、袋装饲料经传送带机构传送过程通过第一电机带动多个导辊转动实现纠正,从而便于码垛;
12.2、第一气缸活塞杆通过拉杆带动第一十字滑块滑动,能通过多个弧形爪抓取袋装,第二电机带动滑座沿滑轨移动至置物架进行码垛,同时根据码垛高度和位置,分别通过第二气缸、第三气缸能实现快速码垛;
13.3、袋装码垛后,第二电机带动滑座移动,能通过转轴带动压辊移动,并对码垛进行平整。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
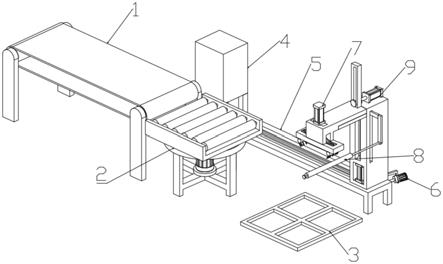
15.图1为本实用新型结构示意图。
16.图2为本实用新型结构纠正机构示意图。
17.图3为本实用新型结构滑轨示意图。
18.图4为本实用新型结构平整机构和放置组件示意图。
19.图5为本实用新型结构抓取机构示意图。
20.图中:1、传送带机构;2、纠正机构;21、固定台;22、第一电机;23、底座;24、导辊;3、置物架;4、控制装置;5、滑轨;51、第一滑槽;52、第二滑槽;6、水平移动装置;61、第二电机;611、支座;62、矩形滑块;63、齿轮;64、齿板;7、抓取机构;71、第一气缸;72、圆块;73、拉杆;74、第一十字滑块;75、固定轴;76、弧形爪;77、导块;771、第一十字滑槽;8、平整机构;81、l形杆;82、转轴;83、压辊;9、放置组件;91、第二气缸;92、圆形挡块;93、滑座;931、第二十字滑槽;932、安装槽;94、第三十字滑块;95、z形连接块;951、第五滑槽;952、凸形转槽;96、滑板;961、凸形滑槽;97、第三气缸。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例:如图1-5所示,本实用新型提供了一种袋装饲料平整码垛机构,包括传送带机构1,传送带机构1用于传送袋装饲料,所述传送带机构1一端设有纠正机构2,纠正机构
2用于对袋装饲料的摆放位置进行纠正,所述传送带机构1侧面设有滑轨5,所述滑轨5一端上表面固定安装有控制装置4,控制装置4用于安装电气组件,所述滑轨5内安装有水平移动装置6,水平移动装置6沿滑轨5移动,所述滑轨5上表面对称开设有第一滑槽51,所述第一滑槽51之间的滑轨5上表面开设有第二滑槽52,所述第一滑槽51内滑动连接有放置组件9,放置组件9沿滑轨5移动,所述放置组件9与水平移动装置6固定连接,水平移动装置6带动放置组件9移动,所述放置组件9上滑动安装有抓取机构7、平整机构8,放置组件9和抓取机构7、平整机构8一起移动,所述抓取机构7底端设有置物架3,袋装饲料被抓取放置在置物架3上。
23.进一步的,所述纠正机构2包括有固定台21,所述固定台21上固定安装有第一电机22,第一电机22被固定安装,所述固定台21上表面设有底座23,所述第一电机22输出端贯穿固定台21,并固定连接底座23底面,所述底座23上转动安装有多个导辊24,从而第一电机22带动底座23和多个导辊24一起转动,实现对袋装饲料的纠正。
24.进一步的,所述水平移动装置6包括有第二电机61,所述第二电机61外表面固定设有支座611,所述支座611与放置组件9固定连接,第二电机61被固定安装,所述第二电机61输出端活动贯穿滑轨5侧面,并固定连接有两个矩形滑块62,所述矩形滑块62之间的第二电机61输出端外表面固定连接有齿轮63,所述矩形滑块62滑动设于第一滑槽51内,所述齿轮63滑动设于第二滑槽52内,所述齿轮63啮合连接有齿板64,所述齿板64固定设于第二滑槽52内底面,从而第二电机61带动齿轮63转动,并沿齿板64、第二滑槽52内移动,从而能带动矩形滑块62沿第一滑槽51内滑动。
25.进一步的,所述放置组件9包括有第二气缸91,所述第二气缸91底端固定连接有滑座93,第二气缸91被固定安装,所述滑座93底面固定连接矩形滑块62上表面,从而矩形滑块62能带动滑座93一起移动,所述滑座93上开设有第二十字滑槽931、安装槽932,所述第二十字滑槽931内滑动连接有第三十字滑块94,所述安装槽932内固定安装有第三气缸97,第三气缸97与滑座93固定连接,所述第三气缸97活塞杆与第三十字滑块94底端固定连接,第三气缸97推动第三十字滑块94沿第二十字滑槽931上下滑动,所述第三十字滑块94与平整机构8固定连接,第三十字滑块94带动平整机构8一起移动,所述滑座93侧面固定设有滑板96,所述滑板96上表面开设有凸形滑槽961,所述凸形滑槽961内滑动连接有z形连接块95,z形连接块95沿滑板96上表面滑动,所述z形连接块95上开设有第五滑槽951、凸形转槽952,所述第二气缸91活塞杆固定设有圆形挡块92,所述圆形挡块92滑动卡接第五滑槽951两侧,从而第二气缸91能通过圆形挡块92推动z形连接块95滑动,并且不会影响z形连接块95上下移动,所述z形连接块95外侧与第三十字滑块94内侧固定连接,所述z形连接块95上表面与抓取机构7固定连接,从而抓取机构7能被z形连接块95推动。
26.进一步的,所述抓取机构7包括有第一气缸71、导块77,所述第一气缸71底端固定连接z形连接块95上表面,第一气缸71被z形连接块95上表面固定安装,所述第一气缸71活塞杆固定设有圆块72,所述圆块72上对称转动铰接有拉杆73,第一气缸71带动拉杆73移动,所述拉杆73设于凸形转槽952内,拉杆73能在凸形转槽952内做弧形移动,所述拉杆73底端转动铰接有第一十字滑块74,所述导块77上表面开设有第一十字滑槽771,所述第一十字滑块74滑动连接于第一十字滑槽771内,所述第一十字滑块74底端固定设有固定轴75,所述固定轴75外表面固定设有多个弧形爪76,从而拉杆73带动导块77沿第一十字滑槽771内滑动,能使多个弧形爪76进行抓取。
27.进一步的,所述平整机构8包括有l形杆81,所述l形杆81上表面固定连接第三十字滑块94侧面,l形杆81被第三十字滑块94带动移动,所述l形杆81侧面固定连接有转轴82,所述转轴82外表面转动连接有压辊83,从而l形杆81带动转轴82移动,并能通过压辊83对码垛进行平整。
28.工作原理:传送带机构1用于传送袋装饲料,然后第一电机22带动底座23和多个导辊24一起转动,实现对袋装饲料的纠正,然后第二电机61外表面固定设有的支座611与滑座93固定连接,从而第二电机61本体不会转动,而是第二电机61的输出端带动齿轮63转动,并沿齿板64、第二滑槽52内移动,从而能带动矩形滑块62和滑座93一起沿第一滑槽51内滑动,从而第一气缸71通过拉杆73带动导块77沿第一十字滑槽771内滑动,能使多个弧形爪76进行抓取袋装饲料,然后第一电机22带动滑座93向置物架3移动,进行放置袋装饲料工作,具体的,第三气缸97推动第三十字滑块94沿第二十字滑槽931上下滑动,使z形连接块95上下移动的同时,因第二气缸91活塞杆的圆形挡块92滑动卡接第五滑槽951内,从而能实现被抓取的袋装饲料能实现高度改变,然后第二气缸91推动z形连接块95沿滑板96上表面滑动,能使被抓取的袋装饲料能实现摆放位置的变化,码垛完成后,滑座93往传送带机构1方向移动,通过l形杆81带动转轴82移动,能实现压辊83对码垛的平整工作。
29.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。