1.本技术涉及塑料造粒机技术领域,尤其是涉及一种塑料造粒机的塑料颗粒回收装置。
背景技术:
2.挤塑机按照机头料流方向和螺杆中心线的夹角,将机头分成斜角机头和直角机头。机头的外壳是用螺栓固定在机身上,机头内的模具有模芯坐,并用螺帽固定在机头进线端口,模芯座的前面装有模芯,模芯及模芯座的中心有孔,用于通过芯线;在机头前部装有均压环,用于均衡压力;挤包成型部分由模套座和模套组成,模套的位置可由螺栓通过支撑来调节,以调整模套对模芯的相对位置,便于调节挤包层厚度的均匀性。机头外部装有加热装置和测温装置。
3.塑料造粒机是用于加工废旧塑料的再生加工机,它对解决日益严重的白色污染起着重要的作用。
4.针对上述中的相关技术,发明人认为塑料造粒机在使用时,通常只用简单的回收桶来盛放加工后的生成的塑料颗粒,非常不方便运输,容易撒漏。
技术实现要素:
5.为了方便塑料颗粒回收后进行运输,本技术提供一种塑料造粒机的塑料颗粒回收装置。
6.本技术提供的一种塑料造粒机的塑料颗粒回收装置采用如下的技术方案:
7.一种塑料造粒机的塑料颗粒回收装置,包括收集箱,所述收集箱的上侧开口,收集箱的上侧设置有箱盖,所述箱盖的一侧与收集箱转动连接,收集箱上设置有用于驱动箱盖转动的第一驱动机构,箱盖盖合时完全遮挡开口,收集箱的底部设置有辅助运输机构,所述收集箱上设置有用于驱动辅助运输机构打开或者关闭的第二驱动机构。
8.通过采用上述技术方案,通过第一驱动机构转动打开箱盖,通过收集箱的开口处进行塑料颗粒的收集,当需要进行塑料颗粒的运输时,关闭箱盖,通过第一驱动机构打开辅助运输机构,辅助收集箱进行运输,当不需要收集箱运输时,通过第二驱动机构关闭辅助运输机构使收集箱固定,使塑料颗粒方便运输且不易撒漏。
9.可选的,所述第一驱动机构包括转动轴和第一电机,所述转动轴与箱盖的一侧固定连接,所述转动轴与收集箱的外侧转动连接,所述第一电机固定设置在收集箱上,第一电机的输出轴与转动轴的一端固定连接。
10.通过采用上述技术方案,通过第一电机驱动转动轴转动,使转动轴相对收集箱进行转动,转动轴带动箱盖转动,使箱盖打开,可以进行塑料颗粒的收集,当需要进行收集箱的运输时,将箱盖闭合,方便运输过程中塑料颗粒不易掉落。
11.可选的,所述箱盖上设置有限位板,所述限位板与箱盖垂直设置,当箱盖盖合在收集箱上时,所述限位板与收集箱外侧抵紧。
12.通过采用上述技术方案,通过限位板使箱盖盖合的时候与收集盒抵紧,使收集箱在运输的过程中,更好的保持闭合状态,使塑料颗粒不易散落。
13.可选的,所述收集箱采用长方体状,所述辅助运输机构包括多个轮子和连接杆,所述轮子分别转动连接在连接杆上,所述连接杆沿靠近或远离收集箱上侧的位置滑移连接在收集箱的四个边角上,所述第二驱动机构用于驱动连接杆滑移。
14.通过采用上述技术方案,当需要进行收集箱的运输时 通过第二驱动机构驱动连接杆带动轮子滑移到指定位置,此时通过轮子进行收集箱行动,使收集箱的运输更加方便;当不需要运输时,通过第二驱动机构将轮子收起,增强了收集箱在收集塑料颗粒时的稳定性。
15.可选的,所述连接杆上固定设置有t型块,所述收集箱上沿连接杆的滑动方向开设有t型槽,所述t型块通过t型槽与收集箱滑移连接。
16.通过采用上述技术方案,通过t型块和t型槽的设置,使连接杆不易与收集箱分离,确保连接杆带动轮子沿t型槽的开设方向上滑移。
17.可选的,所述第二驱动包括齿轮和第二电机,所述齿轮转动连接在收集箱外侧,所述连接杆设置为齿条状,所述齿轮与连接杆啮合,所述第二电机固定设置在收集箱上,第二电机的输出轴与齿轮的中心处固定连接。
18.通过采用上述技术方案,当需要进行轮子的调整时,通过第二电机驱动齿轮转动,使齿轮带动连接杆滑动,使连接杆带动轮子调整位置。
19.可选的,靠近塑料造粒机出料的一侧固定设置有定位件,所述收集箱与定位件相对固定时,收集箱的底部与定位件卡接。
20.通过采用上述技术方案,通过定位件方便了对收集箱放置位置的把控,这样收集箱在使用时可以更加精确的对准进行塑料颗粒的收集。
21.可选的,所述定位件上固定设置有导向杆,所述收集箱的底部开设有导向槽,所述导向杆通过导向槽与收集箱滑动连接。
22.通过采用上述技术方案,通过导向杆辅助收集箱进行定位,收集箱在没有将轮子收起时,先将导向槽与导向杆对准确定收集箱的大概位置,在不断调整轮子的过程中,导向杆不断进入导向槽内,使收集箱以准确的位置固定到定位件上。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.通过收集箱、辅助运输机构和箱盖的设置,使塑料颗粒通过收集箱的开口被收集到收集箱内,当需要运输时,盖合箱盖,并通过辅助运输机构进行收集箱的运输,使运输过程更加简便且塑料颗粒不易散落。
附图说明
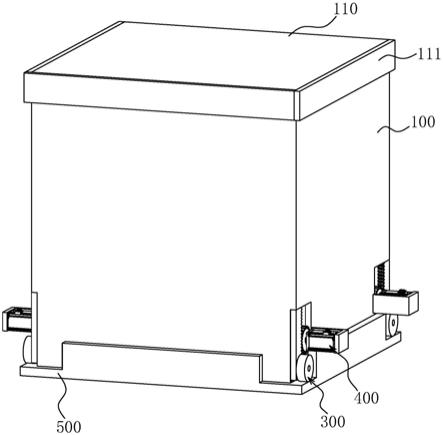
25.图1是本技术实施例中塑料造粒机的塑料颗粒回收装置的结构视图。
26.图2是图1中箱盖的爆炸视图。
27.图3是图1中定位件的爆炸视图。
28.图4是图1中辅助运输机构和第二驱动机构的结构视图。
29.附图标记说明:
30.100、收集箱;110、箱盖;111、限位板;120、t型槽;130、导向槽;200、第一驱动机构;
210、转动轴;220、第一电机;300、辅助运输机构;310、轮子;320、连接杆;321、t型块;400、第二驱动机构;410、齿轮;420、第二电机;500、定位件;510、导向杆。
具体实施方式
31.以下结合附图1-4对本技术作进一步详细说明。
32.本技术实施例公开一种塑料造粒机的塑料颗粒回收装置。参照图1,回收装置包括收集箱100,收集呈长方体状,在本实施例中采用正方体,也可以采用其他形状。收集箱100的上侧开口,开口处转动连接有箱盖110,箱盖110沿靠近或远离开口的方向与收集箱100盖合,箱盖110与收集箱100盖合时,箱盖110与收集箱100抵紧且完全盖合开口。
33.参照图1和图2,收集箱100上设置有第一驱动机构200,第一驱动机构200连接收集箱100和箱盖110,第一驱动机构200用于驱动箱盖110转动。第一驱动机构200包括转动轴210,转动轴210与箱盖110的一侧固定连接,收集箱100外侧靠近开口处开设有孔,转动轴210穿过孔与收集箱100转动连接,转动轴210不会与收集箱100相互分离。转动轴210的一端设置有电机,电机固定设置在收集箱100上,电机的输出轴与转动轴210的一端固定连接。箱盖110的不连接转动轴210的三侧均固定设置有限位板111,箱盖110与收集箱100抵紧时,限位板111与收集箱100的外侧抵紧。
34.参照图1和图3,回收装置还包括定位件500,定位件500固定设置在塑料造粒机出料的一侧,定位件500包括一个板和与板垂直且固定的连接的四个块,板与块之间的空间恰好供收集箱100的底部放置,收集箱100与定位件500相对固定后,定位件500的块与收集箱100的外侧抵紧。定位件500的板中心固定设置有导向杆510,收集箱100底部与导向杆510对应的位置上开设有导向槽130,导向杆510通过导向槽130与收集箱100滑移连接。
35.参照图1和图4,收集箱100位于四个边角的位置设置有辅助运输机构300,辅助运输机构300用于辅助收集箱100进行运输。辅助运输机构300包括多个轮子310,本实施例中采用四个轮子310,每个轮子310上均设置有一个连接杆320,轮子310与连接杆320转动连接,连接杆320不影响轮子310的转动,连接杆320沿收集箱100的运动方向与收集箱100滑动连接。收集箱100上沿连接杆320的滑动方向开设有t型槽120,连接杆320上固定设置有t型块321,t型块321通过t型槽120与收集箱100滑动连接,在本实施例中收集箱100边角处开设有供连接杆320滑动的滑动口,也可以采用其他方式实现。
36.连接杆320上设置有第二驱动机构400,第二驱动机构400连接连接杆320和收集箱100,第二驱动机构400用于驱动连接杆320滑移。第二驱动机构400包括齿轮410,连接杆320采用齿条,齿轮410与连接杆320啮合。收集箱100上固定设置有第二电机420,第二电机420的输出轴与齿轮410的中心处固定连接。
37.本技术实施例一种塑料造粒机的塑料颗粒回收装置的实施原理为:当需要进行塑料颗粒收集时,将收集箱100通过轮子310运输到定位件500上,使导向杆510与导向槽130对应,然后通过驱动第二电机420使齿轮410转动,齿轮410带动连接杆320滑移,使连接杆320带动轮子310向开口方向滑移,此时导向杆510逐渐进入导向槽130内,当导向杆510完全进入导向槽130内时,收集箱100与定位件500卡接。然后通过第一电机220驱动转动轴210转动,使转动轴210带动箱盖110打开,然后进行塑料颗粒的收集。
38.当需要进行塑料颗粒的运输时,重复上述步骤使箱盖110闭合,此时限位板111与
收集箱100抵紧。然后通过第二电机420驱动轮子310归位,并通过轮子310进行收集箱100的运输。
39.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。