1.在此描述的实施例涉及多轿厢电梯系统,且更特别地涉及基于电荷存储状态提供智能控制的电梯轿厢移动器。
背景技术:
2.自主电梯轿厢移动器可使用马达驱动的轮在竖直轨道梁上向上和向下推进电梯轿厢,该轨道梁可为工字梁,具有形成前和后轨道表面的相应腹板。该系统的两个元件包括将由传统t形轨道上的滚子导向件引导的电梯轿厢,以及将容纳两(2)至四(4)个马达驱动轮的自主轿厢移动器。轿厢移动器的操作目标是在不会由于电力耗尽而延迟的情况下操作。
技术实现要素:
3.公开一种轿厢移动器,该轿厢移动器配置成在井道的通道中移动电梯轿厢,该轿厢移动器包括:功率供应部,其配置成向一个或多个马达提供功率以驱动相应的一个或多个轮;轿厢移动器控制器,其可操作地连接到功率供应部;以及监管控制器,其可操作地连接到轿厢移动器控制器,其中轿厢移动器控制器和监管控制器配置成执行健康监测协议(protocol),从而:监测功率供应部的荷电状态(soc);以及响应于确定功率供应部处于低soc来控制轿厢移动器。
4.除了轿厢移动器的上文方面的一个或多个外或作为备选,当执行健康监测协议时,轿厢移动器控制器配置成执行运载工具控制模块,从而响应于确定功率供应部处于低soc来执行多个级别的运载工具控制,该级别包括:第一级别的运载工具控制,包括调整轿厢移动器的一个或多个运动控制参数。
5.除了轿厢移动器的上文方面的一个或多个外或作为备选,轿厢移动器的一个或多个运动控制参数包括轿厢移动器的速度。
6.除了轿厢移动器的上文方面的一个或多个外或作为备选,第二级别的运载工具控制包括引导轿厢移动器驻停在最近的楼层处。
7.除了轿厢移动器的上文方面的一个或多个外或作为备选,当执行运载工具控制模块时,轿厢移动器控制器配置成监测功率供应部的soc和下者中的一个或多个:轿厢移动器在井道中的位置;轿厢移动器的速度;轿厢移动器的加速度;由轿厢移动器经历的振动和冲击;以及轿厢移动器的负载。
8.除了轿厢移动器的上文方面的一个或多个外或作为备选,轿厢移动器控制器配置成在确定功率供应部的soc为下者时执行运载工具控制模块:低于第一存储功率范围,执行功率供应部的主动(proactive)功率管理;以及在第二存储功率范围内,执行功率供应部的被动功率管理。
9.除了轿厢移动器的上文方面的一个或多个外或作为备选,当执行健康监测协议时,监管控制器配置成执行监管控制模块,从而响应于确定功率供应部处于低soc执行多个
级别的监管控制,包括:第一级别的监管控制,其包括调整可操作地连接到轿厢移动器的电梯轿厢的调度要求。
10.除了轿厢移动器的上文方面的一个或多个外或作为备选,第二级别的监管控制包括将轿厢移动器引导到充电站。
11.除了轿厢移动器的上文方面的一个或多个外或作为备选,当执行运载工具控制模块时,监管控制器配置成监测功率供应部的soc和下者中的一个或多个:其它轿厢移动器在井道内的位置;请求服务的楼层;以及充电站在井道中的位置。
12.除了轿厢移动器的上文方面的一个或多个外或作为备选,监管控制器配置成在确定功率供应部的soc为下者时执行监管控制模块:在第一存储功率范围内,执行功率供应部的主动功率管理;以及高于第二存储功率范围,执行功率供应部的被动功率管理。
13.还公开一种操作轿厢移动器的方法,该轿厢移动器配置成在井道的通道中移动电梯轿厢,该方法包括:利用功率供应部向一个或多个马达提供功率以驱动轿厢移动器的相应的一个或多个轮,其中轿厢移动器控制器可操作地连接到功率供应部且监管控制器可操作地连接到轿厢移动器控制器;由轿厢移动器控制器和监管控制器执行健康监测协议,包括:监测功率供应部的荷电状态(soc);以及响应于确定功率供应部处于低soc来控制轿厢移动器。
14.除了该方法的上文方面的一个或多个外或作为备选,该方法包括:当执行健康监测协议时,由轿厢移动器控制器执行运载工具控制模块,从而响应于确定功率供应部处于低soc来执行多个级别的运载工具控制,包括:执行第一级别的运载工具控制,包括调整轿厢移动器的一个或多个运动控制参数。
15.除了该方法的上文方面的一个或多个外或作为备选,轿厢移动器的一个或多个运动控制参数包括轿厢移动器的速度、加速度,以及由轿厢移动器经历的振动和冲击。
16.除了该方法的上文方面的一个或多个外或作为备选,该方法包括执行第二级别的运载工具控制,包括引导轿厢移动器驻停在最近的楼层处。
17.除了该方法的上文方面的一个或多个外或作为备选,该方法包括:当执行运载工具控制模块时,由轿厢移动器控制器监测功率供应部的soc和下者中的一个或多个:轿厢移动器在井道中的位置;轿厢移动器的速度;轿厢移动器的加速度;由轿厢移动器经历的振动和冲击;以及轿厢移动器的负载。
18.除了该方法的上文方面的一个或多个外或作为备选,该方法包括:在确定功率供应部的soc为下者时由轿厢移动器控制器执行运载工具控制模块:低于第一存储功率范围,执行功率供应部的主动功率管理;以及在第二存储功率范围内,执行功率供应部的被动功率管理。
19.除了该方法的上文方面的一个或多个外或作为备选,该方法包括:当执行健康监测协议时,由监管控制器执行监管控制模块,从而响应于确定功率供应部处于低soc来执行多个级别的监管控制,包括:执行第一级别的监管控制,包括调整可操作地连接到轿厢移动器的电梯轿厢的调度要求。
20.除了该方法的上文方面的一个或多个外或作为备选,该方法包括执行第二级别的监管控制,包括将轿厢移动器引导到充电站。
21.除了该方法的上文方面的一个或多个外或作为备选,该方法包括:当执行运载工
具控制模块时,由监管控制器监测功率供应部的soc和下者中的一个或多个:其它轿厢移动器在井道内的位置;请求服务的楼层;以及充电站在井道中的位置。
22.除了该方法的上文方面的一个或多个外或作为备选,该方法包括:在确定功率供应部的soc为下者时由监管控制器执行监管控制模块:在第一存储功率范围内,执行功率供应部的主动功率管理;以及高于第二存储功率范围,执行功率供应部的被动功率管理。
附图说明
23.视为本发明的主题在说明书的结尾处的权利要求书中特别地指出并明确地要求保护。根据连同附图进行的以下详细描述,本发明的前述及其它特征和优点是明显的,附图中:图1是根据实施例的在井道通道中的电梯轿厢和轿厢移动器的示意;图2示出根据实施例的轿厢移动器;图3是根据实施例的用于执行与关于功率供应部的荷电状态相关的健康监测协议的过程图;以及图4是示出根据实施例的执行与关于功率供应部的荷电状态相关的健康监测协议的方法的流程图。
具体实施方式
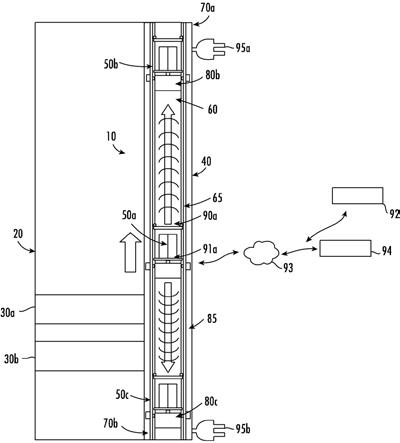
24.图1描绘在示例性实施例中的自推进或无绳电梯系统(电梯系统)10,其可用于具有多个层或楼层30a、30b的结构或建筑物20中。电梯系统10包括通过由建筑物20承载的边界限定的井道40(或电梯竖井)以及多个轿厢50a-50c,该轿厢适于在井道通道60中沿电梯轿厢轨道65(其可为t形轨道)在任意数量的行进方向(例如,向上和向下)上行进。轿厢50a-50c大体上相同,使得在此应参照电梯轿厢50a。井道40还可包括顶端末端70a和底端末端70b。
25.对于轿厢50a-50c中的每个,电梯系统10包括多个轿厢移动器系统(轿厢移动器)80a-80c(出于下文解释的原因,另外称为梁攀爬器系统或梁攀爬器)中的一个。轿厢移动器80a-80c大体上相同,使得在此应参照轿厢50a。轿厢移动器80a配置成沿轿厢移动器轨道85(或轨道梁85,其可为工字梁)移动,以沿井道通道60移动电梯轿厢50a,且自主地操作。轿厢移动器80a可定位成接合轿厢50a的顶部90a、轿厢50a的底部91a或轿厢50a上的任何期望位置。在图1中,轿厢移动器80a接合轿厢50a的底部91a。
26.虽然轿厢移动器80a自主地操作,可包括用于电梯系统10的监管中心92(也称为监管控制器),该监管中心92可配置有足够的处理器,如下文论述的,用于与轿厢移动器80a通信,以提供特定级别的监管指令、传送通知、警报、双向中继信息等。监管控制器92可使用如下所述无线或有线传输路径进行通信。传输信道可为直接的或经由网络93,且可包括云服务94,如下文还论述的。井道可具有充电站95a、95b,用于对轿厢移动器80a的板载功率供应部120(图2,在下文论述)充电。
27.图2是包括电梯轿厢50a、轿厢移动器80a、控制器115和功率源120的电梯系统10的透视图。虽然在图1中示为与轿厢移动器80a分离,在此描述的实施例可适用于包括在轿厢移动器80a中(即,与轿厢移动器80a一起移动通过井道40)的控制器115,且还可适用于位于
轿厢移动器80a外(即,远程连接到轿厢移动器80a且相对于轿厢移动器80a固定)的控制器。
28.虽然在图1中示为与轿厢移动器80a分离,在此描述的实施例可适用于包括在轿厢移动器80a中(即,与轿厢移动器80a一起移动通过井道40)的功率源120,且还可适用于位于轿厢移动器80a外(即,远程连接到轿厢移动器80a且相对于轿厢移动器80a固定)的功率源。
29.轿厢移动器80a配置成在井道40内并沿竖直地延伸穿过井道40的导轨109a、109b移动电梯轿厢50a。在实施例中,导轨109a、109b是丁字梁。轿厢移动器80a包括一个或多个电动马达132a、132b。电动马达132a、132b配置成通过旋转压靠形成轿厢移动器轨道85(图1)的导向梁111a、111b的一个或多个机动化轮134a、134b而在井道40内移动轿厢移动器80a。在实施例中,导向梁111a、111b是工字梁。要理解的是,虽然示出工字梁,任何梁或类似结构可用于在此描述的实施例。由电动马达132a、132b驱动的轮134a、134b、134c、134d之间的摩擦允许轮134a、134b、134c、134d沿导向梁111a、111b向上21和向下22攀爬。导向梁竖直地延伸穿过井道40。要理解的是,虽然示出两个导向梁111a、111b,在此公开的实施例可与一个或多个导向梁一起使用。还要理解的是,虽然示出两个电动马达132a、132b,在此公开的实施例可适用于具有一个或多个电动马达的轿厢移动器80a。例如,轿厢移动器80a可具有用于四个轮134a、134b、134c、134d(一般地,轮134)中的每个的电动马达。电动马达132a、132b可为永磁电动马达、异步马达或本领域技术人员已知的任何电动马达。未在此示出的其它实施例中,另一配置可具有在两个不同竖直位置处(即,在电梯轿厢50a的底部和顶部处)的动力轮。
30.第一导向梁111a包括腹板部分113a和两个凸缘部分114a。第一导向梁111a的腹板部分113a包括第一表面112a和与第一表面112a相反的第二表面112b。第一轮134a与第一表面112a接触,且第二轮134b与第二表面112b接触。第一轮134a可通过轮胎135与第一表面112a接触,且第二轮134b可通过轮胎135与第二表面112b接触。第一轮134a由第一压紧机构150a抵靠第一导向梁111a的第一表面112a压紧,且第二轮134b由第一压紧机构150a抵靠第一导向梁111a的第二表面112b压紧。第一压紧机构150a将第一轮134a和第二轮134b压紧在一起,以夹紧在第一导向梁111a的腹板部分113a上。
31.第一压紧机构150a可为金属或弹性体弹簧机构、气动机构、液压机构、螺丝扣机构、机电促动器机构、弹簧系统、液压缸、机动化弹簧装置或任何其它已知的力促动方法。
32.第一压紧机构150a可在电梯系统10的操作期间能够实时调整,以控制第一轮134a和第二轮134b在第一导向梁111a上的压紧。第一轮134a和第二轮134b可各自包括轮胎135,以增加与第一导向梁111a的牵引力。
33.第一表面112a和第二表面112b竖直地延伸穿过井道117,从而为第一轮134a和第二轮134b提供在上面行进的轨道表面。凸缘部分114a可用作护轨,以有助于沿该轨道表面引导轮134a、134b,且因此有助于防止轮134a、134b脱离轨道表面。
34.第一电动马达132a配置成旋转第一轮134a以沿第一导向梁111a向上21或向下22攀爬。第一电动马达132a还可包括第一马达制动器137a,以减慢和停止第一电动马达132a的旋转。
35.第一马达制动器137a可机械地连接到第一电动马达132a。第一马达制动器137a可为离合器系统、盘式制动器系统、鼓式制动器系统、第一电动马达132a的转子上的制动器、电子制动器、涡流制动器、磁流变流体制动器或任何其它已知的制动系统。梁攀爬器系统
130还可包括可操作地连接到第一导轨109a的第一导轨制动器138a。第一导轨制动器138a配置成通过夹紧在第一导轨109a上来减慢梁攀爬器系统130的移动。第一导轨制动器138a可为作用在梁攀爬器系统130上的第一导轨109a上的卡钳制动器,或作用在接近电梯轿厢50a的第一导轨109上的卡钳制动器。
36.第二导向梁111b包括腹板部分113b和两个凸缘部分114b。第二导向梁111b的腹板部分113b包括第一表面112c和与第一表面112c相反的第二表面112d。第三轮134c与第一表面112c接触,且第四轮134d与第二表面112d接触。第三轮134c可通过轮胎135与第一表面112c接触,且第四轮134d可通过轮胎135与第二表面112d接触。第三轮134c由第二压紧机构150b抵靠第二导向梁111b的第一表面112c压紧,且第四轮134d由第二压紧机构150b抵靠第二导向梁111b的第二表面112d压紧。第二压紧机构150b将第三轮134c和第四轮134d压紧在一起,以夹紧在第二导向梁111b的腹板部分113b上。
37.第二压紧机构150b可为弹簧机构、螺丝扣机构、促动器机构、弹簧系统、液压缸和/或机动化弹簧装置。第二压紧机构150b可在电梯系统10的操作期间能够实时调整,以控制第三轮134c和第四轮134d在第二导向梁111b上的压紧。第三轮134c和第四轮134d可各自包括轮胎135,以增加与第二导向梁111b的牵引力。
38.第一表面112c和第二表面112d竖直地延伸穿过竖井117,从而为第三轮134c和第四轮134d提供在上面行进的轨道表面。凸缘部分114b可用作护轨,以有助于沿该轨道表面引导轮134c、134d,且因此有助于防止轮134c、134d脱离轨道表面。
39.第二电动马达132b配置成旋转第三轮134c以沿第二导向梁111b向上21或向下22攀爬。第二电动马达132b还可包括第二电动马达制动器137b,以减慢和停止第二电动马达132b的旋转。第二马达制动器137b可机械地连接到第二马达132b。第二马达制动器137b可为离合器系统、盘式制动器系统、鼓式制动器系统、第二电动马达132b的转子上的制动器、电子制动器、涡流制动器、磁流变流体制动器或任何其它已知的制动系统。梁攀爬器系统130包括可操作地连接到第二导轨109b的第二导轨制动器138b。第二导轨制动器138b配置成通过夹紧在第二导轨109b上来减慢梁攀爬器系统130的移动。第二导轨制动器138b可为作用在梁攀爬器系统130上的第一导轨109a上的卡钳制动器,或作用在接近电梯轿厢50a的第一导轨109a上的卡钳制动器。
40.电梯系统10还可包括位置参考系统(prs)113。位置参考系统113可安装在井道40的顶部处的固定部分上,诸如在支承件或导轨109上,且可配置成提供与电梯轿厢50a在井道40内的位置相关的位置信号。在其它实施例中,位置参考系统113可直接安装到电梯系统的移动构件(例如,电梯轿厢50a或轿厢移动器80a),或可位于其它位置和/或配置中。
41.位置参考系统113可为用于监测电梯竖井117内的电梯轿厢的位置的任何装置或机构。例如但非限制,位置参考系统113可为编码器、传感器、加速度计、高度计、压力传感器、测距仪或其它系统,且可包括速度感测、绝对位置感测等,如将由本领域技术人员所了解的。
42.控制器115可为电子控制器,其包括处理器116和相关联的存储器119,存储器119包括计算机可执行指令,当由处理器116执行时,这些指令使处理器116执行各种操作。处理器116可为但不限于各种各样的可能架构中的任何的单处理器或多处理器系统,包括均匀地或不均匀地布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路
(asic)、数字信号处理器(dsp)或图形处理单元(gpu)硬件。存储器119可为但不限于随机存取存储器(ram)、只读存储器(rom)或其它电子、光学、磁性或任何其它计算机可读介质。
43.控制器115配置成控制电梯轿厢50a和轿厢移动器80a的操作。例如,控制器115可向轿厢移动器80a提供驱动信号,以控制电梯轿厢50a的加速、减速、调平、停止等。
44.控制器115还可配置成从位置参考系统113或任何其它期望的位置参考装置接收位置信号。在控制器115与位置参考系统113之间传输的数据可单独获得和处理,且拼接在一起,或在两个构件中的一个处处理,且可以以原始或编译的形式处理。
45.当沿导轨109a、109b在井道40内向上21或向下22移动时,电梯轿厢50a可在控制器115的控制下在一个或多个楼层30a、30b处停止。在一个实施例中,控制器115可位于远处或云中。在另一实施例中,控制器115可位于轿厢移动器80a上。
46.电梯系统10的功率供应部120可为任何功率源,包括功率网和/或电池功率部,其与其它构件相结合供应至轿厢移动器80a。在一个实施例中,功率源120可位于轿厢移动器80a上。在实施例中,功率供应部120是包括在轿厢移动器80a中的电池。电梯系统10还可包括附接到电梯轿厢50a或轿厢移动器80a的加速度计107。加速度计107配置成检测电梯轿厢50a和轿厢移动器80a的加速度和/或速度。
47.现在转到图3,在电梯系统10中用作梁攀爬器的所公开的轿厢移动器80a可允许多个轿厢50a、50b在单个井道(通道)60中操作,且在再循环配置中在一组竖直(上和下)通道(例如,包括通道60)中使用水平转运站(未示出)。在系统10中,轿厢移动器(例如,移动器80a、80b)可能不需要具有到井道40的硬连线连接,且可改为具有功率供应部120。功率供应部120可包括板载电池组、电容器或其它功率存储工具,诸如其它类型的燃料电池或气动或液压系统,其中包括但不限于流体和/或气体的操作材料可需要监测、补充和/或再填充。功率供应部120可需要定期充电以维持操作。因此,功率供应部120的荷电状态(soc)可需要监测和控制以最大限度地增加性能。
48.如图3中示出的,电梯系统10配置成执行运载工具健康监测协议(或健康监测协议)200。执行健康监测协议200包括执行运载工具控制模块210(其可称为运载工具上soc的被动控制),其可为用于执行轿厢移动器控制器115板载的相应协议集的软件。备选地,运载工具控制模块210包括计算硬件,其类似于轿厢移动器控制器115并与轿厢移动器80a的板载轿厢移动器控制器115通信。执行健康监测协议200还包括执行监管控制模块250,监管控制模块250可为监管控制器92的板载软件或类似于轿厢移动器控制器115的计算硬件,轿厢移动器控制器115板载于监管控制器92上、在云服务94上或在与轿厢移动器控制器115通信的另一计算环境中。为了此类通信,监管控制器92响应于运载工具控制模块210的执行而从轿厢移动器控制器115接收数据。健康监测协议200的执行优化轿厢移动器80a的控制。在一个实施例中,监管控制模块250在轿厢移动器控制器115(或可操作地连接到轿厢移动器控制器115的轿厢移动器80a的板载的另一处理器)上执行,且来自该执行的一个或多个所得命令发送到监管控制器92。
49.执行运载工具控制模块210的轿厢移动器控制器115配置成利用来自传感器113的数据(在图3中称为内部数据220)来确定功率供应部120的soc。基于功率供应部120的soc,轿厢移动器控制器115配置成对功率供应部120的soc执行两个级别的响应,包括第一级别(级别1)230响应和第二级别(级别2)240响应。由轿厢移动器控制器115考虑的传感器数据
包括当前轿厢位置、感测速度、感测加速度、预期和意外的移动和振动以及轿厢中的负载。
50.作为第一级别230的响应,轿厢移动器控制器115包括调整轿厢移动器的运动控制参数以适应低的感测soc。作为第二级别240的响应,轿厢移动器控制器115指令轿厢移动器80a行进到最近的楼层并终止当前运行。在一个实施例中,假如有足够的功率(诸如在低的非临界的范围内,例如最大soc的10-25%),轿厢移动器80a可行进到最近的楼层以放下乘客,且然后行进到充电站(如果该充电站位于不同的楼层)。在一个实施例中,功率水平可确定轿厢移动器80a行进的方向。例如,如果功率非常低(在临界范围内,诸如在最大soc的5%至10%之间),轿厢移动器80a可优先在向下方向上行进,以放下剩余乘客和/或到达充电站,因为向下行进可需要利用较少的功率。在临界阈值范围以下,例如在最大soc的5%以下,轿厢移动器80a可能处于电力耗尽范围内,且可需要通知维护并行进到最近的较低充电站,且保持在那里以经受维护检查。轿厢移动器控制器115的这些响应可被认为是被动响应,其响应于不同水平的低感测soc以避免在当前运行期间的功率损失。另一级别的响应可包括:当在向下方向上移动时施加制动,当配备有再生制动系统时,为功率系统充电。
51.执行监管控制模块250的监管控制器92还配置成在确定应用包括第一级别(级别1)270响应和第二级别(级别2)280响应的两个响应级别中的哪一个时利用内部数据260。由监管控制器92考虑的内部数据260包括井道40中所有轿厢50a、50b的位置、请求由轿厢(例如,轿厢50a、50b)服务的楼层以及充电站95a、95b相对于服务中的轿厢50a、50b的位置。
52.作为第一级别230的响应,监管控制器92可调整调度要求。例如,如果轿厢移动器80a的功率供应部120的soc较低(诸如在低的非临界范围内或以下),且具有较高soc的另一电梯轿厢50b的另一轿厢移动器80b可用,可调度该另一轿厢移动器80a。作为第二级别240的响应,监管控制器92可将轿厢移动器80a引导到充电站95a、95b。监管控制器92的两个响应可被认为是主动响应,其响应于功率供应部120的低soc的不同水平,以保证在所需运行期间功率水平保持足够高。
53.转到图4,流程图示出操作轿厢移动器80a的方法,该轿厢移动器80a配置成在井道40的通道60中自主地移动电梯轿厢50a。如框1010中示出的,该方法包括利用功率供应部120向一个或多个马达(例如马达132a(图2))提供功率以驱动相应的一个或多个轮,例如自主轿厢移动器80a的轮134a。轿厢移动器控制器115可操作地连接到功率供应部120,且监管控制器92可操作地连接到轿厢移动器控制器115。
54.如框1020中示出的,该方法包括由轿厢移动器控制器115和监管控制器92执行健康监测协议。例如,如框1030中示出的,该方法包括监测功率供应部120的荷电状态(soc)。如框1040中示出的,该方法包括:响应于确定功率供应部处于低soc(例如,如上文指示的,在低的非临界范围、临界范围或电力耗尽范围内),控制轿厢移动器80a。
55.如框1050中示出的,该方法包括:当执行健康监测协议200时,由轿厢移动器控制器115执行运载工具控制模块210。根据该操作,轿厢移动器控制器115响应于确定功率供应部120处于低soc来执行多个级别的运载工具控制。
56.如框1060中示出的,该方法包括执行第一级别230的运载工具控制,包括调整轿厢移动器80a的一个或多个运动控制参数。在一个实施例中,如指示的,轿厢移动器80a的一个或多个运动控制参数包括轿厢移动器80a的速度、加速度,以及由轿厢移动器80a经历的振动和冲击。如框1070中示出的,该方法包括执行第二级别240的运载工具控制,包括引导轿
厢移动器80a驻停在最近的楼层处。备选地,可改变减速率或制动器激活,以允许轿厢移动器80a停止在最近的楼层处。
57.如框1080中示出的,该方法包括:当执行运载工具控制模块210时,由轿厢移动器控制器115监测功率供应部120的soc和额外参数。额外参数包括轿厢移动器80a在井道40中的位置、轿厢移动器80a的速度、轿厢移动器80a的加速度、由轿厢移动器80a经历的振动和冲击以及轿厢移动器80a的负载中的一个或多个。
58.如框1090中示出的,该方法包括:在确定功率供应部120的soc在预定范围内时,由轿厢移动器控制器115执行运载工具控制模块210。预定范围低于第一存储功率范围,执行功率供应部120的主动功率管理,以及在第二存储功率范围内,执行功率供应部120的被动功率管理。这通过监管控制器92和轿厢移动控制器115基于它们相应的协议的执行交换信息来确定。
59.如框1100中示出的,该方法包括:当执行健康监测协议200时,由监管控制器92执行监管控制模块250。根据该操作,监管控制器92响应于确定功率供应部120处于低soc来执行多个级别的监管控制。如框1110中示出的,该方法包括执行第一级别270的监管控制,包括调整可操作地连接到轿厢移动器80a的电梯轿厢50a的调度要求。如框1120中示出的,该方法包括执行第二级别280的监管控制,包括将轿厢移动器80a引导到充电站95a、95b。
60.如框1130中示出的,该方法包括:当执行运载工具控制模块210时,由监管控制器92监测功率供应部120的soc和一个或多个额外参数。该一个或多个额外参数包括其它轿厢移动器80b在井道40内的位置、请求服务的楼层以及充电站95a、95b在井道40中的位置。如框1140中示出的,该方法包括:在确定功率供应部120的soc在预定范围内时,由监管控制器92执行监管控制模块250。预定范围在第一存储功率范围内,执行功率供应部120的主动功率管理,以及在第二存储功率范围内,执行功率供应部120的被动功率管理。例如,第一存储范围可高于低的非临界范围或与其部分重叠。第二存储范围可为低的非临界范围、临界范围或电力耗尽范围中的任何。这通过监管控制器92和轿厢移动控制器115基于它们相应的协议的执行交换信息来确定。
61.上文公开的健康监测协议200可优化电池提供功率的轿厢移动器80a的性能,经由执行运载工具控制模块210和监管控制模块250的轿厢移动器控制器115和监管控制器92提供优化的被动和主动适应。该公开的系统可最大限度地增加电梯性能,同时也最大限度地减小所需充电停机时间的影响。
62.上文所述的无线连接可应用包括局域网(lan或用于无线lan的wlan)协议和/或个人局域网(pan)协议的协议。lan协议包括基于电气和电子工程师协会(ieee)的802.11标准的wifi技术。pan协议包括例如蓝牙低能量(btle),这是一种由蓝牙特别兴趣小组(sig)设计和销售的无线技术标准,用于使用短波长无线电波在短距离内交换数据。pan协议还包括zigbee,一种基于来自ieee的802.15.4协议的技术,代表一套高级通信协议,其用于产生具有针对低功率低带宽需求的小型低功率数字无线电的个人局域网。此类协议还包括z-wave,这是一种由z-wave联盟支持的使用网状网络的无线通信协议,其应用低能量无线电波在诸如电器的装置之间进行通信,允许对其进行无线控制。
63.其它适用的协议包括低功耗广域网(lpwan),这是一种无线广域网(wan),设计成允许以低比特率进行远程通信,使终端装置能够使用电池功率部长时间(几年)操作。远程
广域网(lorawan)是由lora联盟维持的一类lpwan,且是媒体访问控制(mac)层协议,其用于分别在网络服务器与应用服务器之间传输管理和应用消息。此类无线连接还可包括射频识别(rfid)技术,用于与集成芯片(ic)(例如,在rfid智能卡上)通信。此外,次1ghz的rf设备在低于次1ghz—典型地在769-935mhz、315mhz和468mhz频率范围内—的ism(工业、科学和医疗)谱带中操作。低于1ghz的该谱带对于rf iot(物联网)应用特别有用。其它lpwan-iot技术包括窄带物联网(nb-iot)和类别m1物联网(cat m1-iot)。用于所公开的系统的无线通信可包括蜂窝通信,例如2g/3g/4g(等)。上文不意在限制适用无线技术的范围。
64.上文所述的有线连接可包括rs(推荐标准)-422下的连接(线缆/接口),也称为tia/eia-422,这是电信行业协会(tia)支持的技术标准,且由电子工业联盟(eia)发起,该eia规定数字信号电路的电气特性。有线连接还可包括用于数据的串行通信传输的rs-232标准下的(线缆/接口),该标准正式定义在诸如计算机终端的dte(数据终端设备)和诸如调制解调器的dce(数据电路终端设备或数据通信设备)之间连接的信号。有线连接还可包括由modbus组织管理的modbus串行通信协议下的连接(线缆/接口)。modbus是一种主/从协议,该协议设计用于可编程逻辑控制器(plc),且是连接工业电子装置的常用手段。无线连接还可包括由profibus & profinet international (pi)管理的profibus(过程现场总线)标准下的连接器(线缆/接口)。profibus是自动化技术中现场总线通信的标准,作为iec(国际电工委员会)61158的一部分公开发布。有线通信还可通过控制器区域网络(can)总线进行。can是一种运载工具总线标准,其允许微控制器和装置在没有主机的情况下在应用中彼此通信。can是由国际标准组织(iso)发布的基于消息的协议。上文不意在限制适用有线技术的范围。
65.如指示的,在此描述的每个处理器可为但不限于各种各样的可能架构中的任何的单处理器或多处理器系统包括均匀地或不均匀地布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)或图形处理单元(gpu)硬件。在此描述的存储器可为但不限于随机存取存储器(ram)、只读存储器(rom)或其它电子、光学、磁性或任何其它计算机可读介质。如上文还描述的,实施例可呈处理器实施的过程和用于实施这些过程的装置(诸如处理器)的形式。实施例还可呈计算机程序代码(例如,计算机程序产品)的形式,其包含体现在诸如软盘、cd-rom、硬盘驱动器或任何其它非暂时性计算机可读介质的有形介质(例如,非暂时性计算机可读介质)中的指令,其中当计算机程序代码加载到计算机中并由计算机执行时,计算机变成用于实施实施例的装置。实施例还可呈计算机程序代码的形式,例如,无论是存储在存储介质中,加载到计算机中和/或由计算机执行,还是通过一些传输介质传输,加载到计算机中和/或由计算机执行,或通过一些传输介质传输,诸如通过电线或线缆、通过光纤或经由电磁辐射,其中当计算机程序代码加载到计算机中并由计算机执行时,计算机变成用于实施示例性实施例的装置。当在通用微处理器上实施时,计算机程序代码段配置微处理器来产生特定的逻辑电路。
66.在此使用的术语仅出于描述特定实施例的目的,且不意在限制本公开内容。用语“约”意在包括与基于在提交申请时可用的设备的特定数量和/或制造公差的测量相关的误差的程度。如在此使用的,单数形式“一”、“一个”和“该”也意在包括复数形式,除非上下文另外清楚地指示。还将理解的是,当在该说明书中使用时,用语“包括(comprises)”和/或“包括了(comprising)”指定所陈述的特征、整数、步骤、操作、元件和/或构件的存在,但不
排除一个或多个其它特征、整数、步骤、操作、元件、构件和/或它们的组合的存在或添加。
67.本领域技术人员将了解,在此示出和描述各种示例性实施例,每个示例性实施例具有在特定实施例中的某些特征,但本公开内容不限于此。相反,可对本公开内容进行修改,以结合此前未描述但与本公开内容的范围相称的任何数量的变型、变更、替换、组合、子组合或等效布置。另外,虽然已描述本公开内容的各种实施例,要理解的是,本公开内容的各方面可仅包括一些所描述的实施例。因此,本公开内容不视为由前述描述来限制,而是仅由所附权利要求书的范围来限制。