1.本发明属于汽车转向控制领域,具体涉及一种线控主动四轮转向控制技术。
背景技术:
2.随着汽车停车位的紧张,汽车如何在在狭窄的空间内车辆调头,或者在有限的空间位置进行车辆停放,成为各位车主的头痛问题;其次,当车辆高速行驶时,需要防止车辆在打方向时车辆侧翻,或者车辆在低速行驶时,在比较小的转弯半径下如何提高车辆的通过性成为车辆研究的主要问题。
3.目前,现有的汽车在行驶较快时汽车的后轮因为速度过快而无法适应汽车的转向,容易造成汽车在快速行驶通过弯道时发生翻车的现象。
4.所以设计一种根据车速控制后轮转角的转向系统来适应汽车角度的转向系统是很有必要的。
技术实现要素:
5.本发明的目的在于提供一种线控主动四轮转向控制装置及其控制方法与控制模式,以提高车辆通过性,使得汽车在行驶较快时汽车的后轮能适应汽车的转向,避免造成汽车在快速行驶通过弯道时发生翻车的现象。
6.为实现线控主动四轮转向模式和传统四轮转向模式之间的切换,即在前一种模式下,可同时主动控制前后轮转角,而在后一种模式下,可实现后轮的主动转向。
7.为了实现上述目的,本发明采用一种线控与四轮转向技术相结合的线控主动四轮转向控制装置,具体如下。
8.一种线控主动四轮转向控制装置,其特征在于包括:前轮转向模块、后轮转向模块、整车控制器(15);前轮转向模块、后轮转向模块及整车控制器(15)通过can总线(14)连接;所述前轮转向模块包括:方向盘(9)、第一转向管柱(8)、前转向轴离合器(5)、路感电机(6)、前轮转矩转角传感器(7)、前轮转向电机(3)、前转向电机离合器(2)、前轮转向执行机构、前齿轮齿条转向器(1)、前轮转向控制器(13);方向盘(9)与第一转向管柱(8)固定连接,前转向轴离合器(5)与第一转向管柱(8)、第二转向管柱(4)连接,用以实现电动助力转向与线控转向模式的切换,路感电机(6)与第一转向管柱(8)连接,前轮转矩转角传感器(7)安装于第一转向管柱(8)上,前轮转向电机(3)与前轮转向执行机构连接;所述后轮转向模块包括:后轮转矩转角传感器(10)、后轮转向电机(11)、后轮随动转向机构、后齿轮齿条转向器(12)、后轮转向控制器(16);后轮转向电机(11)与后轮随动转向机构连接,后轮转角转矩检测转置与后轮转向电机(11)连接;所述后轮随动转向机构包括:后轮转向横拉杆(19)、后轮转向摇臂(18)、转向节(17);后轮转向横拉杆(19)与后轮转向摇臂(18)连接,后轮转向摇臂(18)与转向节连接。
9.一种线控主动四轮转向控制方法,其特征在于包括以下过程:
当车辆低速行驶或原地转动方向盘(9)时:根据转向要求,后轮与前轮的转向为反向,即前轮向左转后轮向右转、当前轮向右转动时后轮向左转,目的以减小转向半径,提高转向的灵活性;此时后轮转向控制器(16)接收can总线(14)中车速信号及前轮转矩转角信号,通过计算,确定电机的转动方向以及相应的输出转矩值:当转角值未变化时,后轮转向控制器(16)增大通过前轮转向控制器(13)确定的转矩值,直到后轮转角达到目标值;当车辆高速运行转动方向盘(9)时:根据转向要求,后轮与前轮的转向为同向,即前轮向左转后轮向左转、当前轮向右转动时后轮向右转,目的以增大转向半径,提高转向的稳定性;此时后轮转向控制器(16)接收can总线(14)中车速信号及前轮转矩转角信号,通过计算,确定电机的转动方向以及相应的输出转矩值:当转角值未变化时,后轮转向控制器(16)增大通过前轮转向控制器(13)确定的转矩值,直到后轮转角达到目标值。
10.一种线控主动四轮转向控制模式,其特征在于包括线控转向工作模式和前轮电动助力转向工作模式;所述的线控转向工作模式为:驾驶员转动方向盘(9),前转向轴离合器(5)断开;前轮转矩转角传感器(7)采集转向信号将信号传递到can总线(14),前轮转向控制器(13)接收can总线(14)中车速信号和前轮转矩转角信号,并控制路感电机(6)提供转矩产生路感,同时控制前轮转向电机(3)提供转矩;转矩通过前齿轮齿条式转向器最终传递到前轮实现前轮转向,同时检测前轮转矩转角传感器(7)的信号,并且将前轮转矩转角信息通过can总线(14)传递给整车控制器(15)和后轮转向控制器(16);此时后轮转向控制器(16)接收can总线(14)中车速信号及前轮转矩转角信号,控制后轮转向电机(11)提供转矩,转矩通过后齿轮齿条式转向器传递到后轮转向横拉杆(19)、后轮转向横拉杆(19)左右移动带动后轮转向摇臂(18)转动、后轮转向摇臂(18)带动转向节(17)转动,转向节(17)与后轮连接从而带动后轮的转动实现后轮转向;所述的前轮电动助力转向工作模式为:驾驶员转动方向盘(9),前转向轴离合器(5)闭合、前轮转向电机(3)的离合器(2)断开,前轮转矩转角传感器(7)采集方向盘(9)转矩转角信号将信号传递到can总线(14),前轮转向控制器(13)接收can总线(14)中车速信号和前轮转矩转角信号;控制路感电机(6)提供转向助力转矩,动力通过方向盘(9)、第一转向管柱(8)、第二转向管柱(4)传递到前齿轮齿条式转向器最终传递到前轮实现前轮转向,同时前轮转矩转角信号通过can总线(14)传递给整车控制器(15)和后轮转向控制器(16);后轮转向控制器(16)接收can总线(14)中车速信号及前轮转矩转角信号,控制后轮转向电机(11)提供转矩;转矩通过后齿轮齿条式转向器传递到后轮转向横拉杆(19),后轮转向横拉杆(19)左右移动带动后轮转向摇臂(18)转动,后轮转向摇臂(18)带动转向节(17)转动,转向节(17)与后轮连接从而带动后轮的转动实现后轮转向。
11.本发明具有有益效果。
12.本发明是在原有的前轮电动助力转向的基础上,通过前转向轴离合器(5)的分离和闭合,配合路感电机(6)实现前轮线控转向和电动助力转向的切换;后轮主动转向系统是在电动助力转向机构的基础上,通过增加后轮主动转向的控制装置,实现后轮的主动转向,该后轮主动转向结构简单,便于应用。
13.由于整车控制器(15)没有增加后轮的can数据通信,只有前轮的can总线(14)地址,为了更好地实现后轮控制,后轮的can数据总线设置成与前轮的can接收数据地址相同,
这样可以接收到整车传递的车速,前轮转向控制器(13)通过can总线(14)将前轮的转角转矩信息传递给整车控制器(15)和后轮控制器,后轮控制器根据整车控制器(15)发送的车速、前轮控制器发送的转角和转矩信息,控制后轮转向。
附图说明
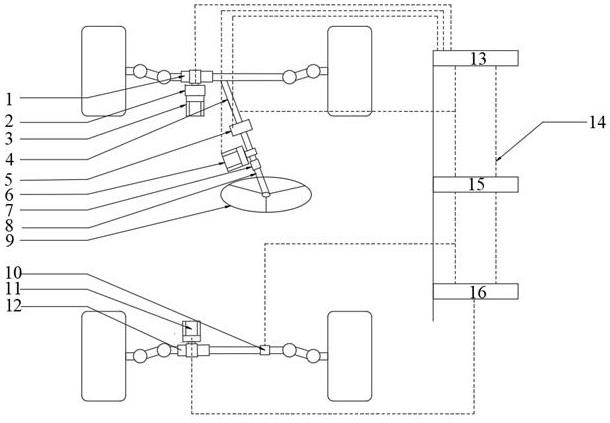
14.图1为本发明一种线控主动四轮转向控制装置结构示意图;图2为本发明后轮随动转向机构示意图。
15.图中:1、前齿轮齿条转向器;2、前转向电机离合器;3、前轮转向电机;4、第二转向管柱;5、前转向轴离合器;6、路感电机;7、前轮转矩转角传感器;8、第一转向管柱;9、方向盘;10、后轮转矩转角传感器;11、后轮转向电机;12、后齿轮齿条转向器;13、前轮转向控制器;14、can总线;15、整车控制器;16、后轮转向控制器;17、转向节;18、后轮转向摇臂;19、后轮转向横拉杆。
具体实施方式
16.下面结合附图和具体实施例,对本发明的技术方案做进一步详细说明。
17.如图1所示,本发明的一种线控主动转向控制装置,包括前轮转向模块、后轮随动转向结构、整车控制器15;所述前轮转向模块包括:方向盘9、第一转向管柱8、前转向轴离合器5、路感电机6、前轮转矩转角传感器7、前轮转向电机3、前转向电机离合器2、前轮转向执行机构、前齿轮齿条转向器1、前轮转向控制器13;所述后轮随动转向结构包括:后轮转矩转角传感器10、后轮转向电机11、后轮随动转向机构、后齿轮齿条转向器12、后轮转向控制器16。
18.前轮转向模块中:方向盘9与第一转向管柱8固定连接,前转向轴离合器5与第一转向管柱8、第二转向管柱4连接,用以实现电动助力转向与线控转向模式的切换,路感电机6与第一转向管柱8连接,前轮转矩转角传感器7安装与第一转向管柱8上,前轮转向电机3与前轮转向执行机构连接。
19.后轮随动转向结构如图2所示:后轮转向电机11通过齿轮齿条机构与后轮转向横拉杆19相连,当后轮转向电机11转动时,带动后轮转向横拉杆19左右移动,后轮转向横拉杆19带动后轮转向摇臂18带动转向节17转动,转向节17与后轮连接,带动后轮的转动。
20.本实施例提供一种线控主动四轮转向控制装置,分为如下两种转向工作模式。
21.模式一:线控转向工作模式:驾驶员通过转动方向盘9,前转向轴离合器5断开,前轮转矩转角传感器7采集转向信号将信号传递到can总线14,前轮转向控制器13接收can总线14中车速信号和前轮转矩转角信号,并控制路感电机6提供转矩产生路感,同时控制前轮转向电机3提供转矩,转矩通过前齿轮齿条式转向器最终传递到前轮实现前轮转向,同时检测前轮转矩转角传感器7的信号,并且将前轮转矩转角信息通过can总线14传递给整车控制器15和后轮转向控制器16。同时后轮转向控制器16接收can总线14中车速信号及前轮转矩转角信号,控制后轮转向电机11提供转矩,转矩通过后齿轮齿条式转向器传递到后轮转向横拉杆19,后轮转向横拉杆19左右移动带动后轮转向摇臂18转动,后轮转向摇臂18带动转向节17转动,转向节17与后轮连接,带动后轮的转动实现后轮转向。
22.模式二:前轮电动助力转向工作模式:驾驶员通过转动方向盘9,前转向轴离合器5
闭合,前轮转向电机3的离合器2断开,前轮转矩转角传感器7采集方向盘9转矩转角信号将信号传递到can总线14,前轮转向控制器13接收can总线14中车速信号和前轮转矩转角信号,控制路感电机6提供转向助力转矩,动力通过方向盘9、第一转向管柱8、第二转向管柱4传递到前齿轮齿条式转向器最终传递到前轮实现前轮转向,同时前轮转矩转角信号通过can总线14传递给整车控制器15和后轮转向控制器16。后轮转向控制器16接收can总线14中车速信号及前轮转矩转角信号,控制后轮转向电机11提供转矩,转矩通过后齿轮齿条式转向器传递到后轮转向横拉杆19,后轮转向横拉杆19左右移动带动后轮转向摇臂18转动,后轮转向摇臂18带动转向节17转动,转向节17与后轮连接,带动后轮的转动实现后轮转向。
23.本实施例同时提供了上述线控主动四轮转向系统的后轮主动转向控制方法。
24.当车辆低速行驶或原地转动方向盘9时,根据转向要求,后轮与前轮的转向应为反向,即前轮向左转,后轮向右转,当前轮向右转动时,后轮向左转,目的以减小转向半径,提高转向的灵活性。后轮转向控制器16接收can总线14中车速信号及前轮转矩转角信号,通过计算,确定电机的转动方向以及相应的输出转矩值。当转角值未变化时,后轮转向控制器16增大通过前轮转向控制器13确定的转矩值,直到后轮转角达到目标值。
25.当车辆高速运行,转动方向盘9时,根据转向要求,后轮与前轮的转向应为同向,即前轮向左转,后轮向左转,当前轮向右转动时,后轮向右转,目的以增大转向半径,提高转向的稳定性。后轮转向控制器16接收can总线14中车速信号及前轮转矩转角信号,通过计算,确定电机的转动方向以及相应的输出转矩值。当转角值未变化时,后轮转向控制器16增大通过前轮转向控制器13确定的转矩值,直到后轮转角达到目标值。