1.本发明涉及自动驾驶车辆跟驰控制领域,具体涉及在冰雪环境下自动驾驶汽车跟驰控制方法。
背景技术:
2.近年来,自动驾驶技术成为新的研究热点,如何让自动驾驶技术适用于更多交通场景成为研究者面临的一个难题。冰雪路面作为中国北方地区一种常见的季节性道路形态,相较于在正常干燥的柏油路面行驶存在道路摩擦系数下降、环境感知范围缩小等问题,而这些都增加了自动驾驶的复杂性和危险性。而跟驰行为控制又是车辆纵向驾驶行为的关键部分。因此,自动驾驶车辆的跟驰控制方法需要针对冰雪环境行驶场景进行专门的设计优化,以实现安全、高效、舒适的自动驾驶跟驰需求。
3.现有对于自动驾驶汽车在冰雪环境行驶的研究非常少,大多数相关研究侧重于进行人工驾驶车辆在冰雪路面上的跟驰仿真控制。魏增超等通过对驾驶员冰雪路面行驶时车头时距和反应时间的变化进行调查,优化改进了全速度差(fvd) 跟驰模型;刘亚帝等通过计算驾驶员在冰雪路面行驶时最小安全距离的不同,改进了最小安全距离跟驰模型;张诗悦等根据实际调查的车辆在冰雪路面上的行驶速度和车头时距等数据对全速度差(fvd)模型进行优化;杨龙海等考虑冰雪路面下驾驶员任务难度改进了智能驾驶人(idm)跟驰模型。但是以往的研究中未有提出针对自动驾驶汽车在冰雪环境下跟驰行为的研究,因为自动驾驶汽车与人工驾驶汽车控制存在明显差异,所以冰雪环境对自动驾驶车辆的影响也会不同,因此,研究自动驾驶车辆冰雪环境跟驰控制方法是非常有必要的,这将会丰富自动驾驶汽车的适用场景,提高自动驾驶的安全性。
4.基于上述背景,亟需设计一种自动驾驶车辆冰雪环境下跟驰控制的方法。通过量化冰雪环境对自动驾驶车辆的影响,优化改进自动驾驶车辆的跟驰控制模型,从而提高自动驾驶汽车应用场景的多样性。经查找,暂未有自动驾驶车辆冰雪环境下跟驰控制方法的相关报道。
技术实现要素:
5.1、一种自动驾驶车辆冰雪环境下跟驰控制方法,包括如下步骤:
6.步骤一、冰雪环境影响系数计算:
7.雪后随车辆行驶倾轧产生积雪融化和堆积而形成的冰膜和积雪路面,对车辆行驶产生的影响用冰雪环境影响系数i
冰雪
表示,由摩擦系数影响系数i
摩擦
和感知距离影响i
感知
组成,
8.i
冰雪
=i
摩擦
×i感知
9.根据冰雪条件对路面摩擦系数的影响,i
摩擦
=0.15~0.35;根据自动驾驶车辆感知系统在冰雪环境下感知距离的变化,不包含冰花、积雪污物等对感知系统严重遮挡的情况,i
感知
=0.20~0.60,冰雪环境越恶化,两个参数取值越小;
10.一般北方降雪后,积雪不会马上融化,经过车辆倾轧和人工清雪处理后,路面一般会呈现为粗糙冰膜路面形态和雪下冰膜路面形态,在这两种常见路面情况下,路面摩擦系数分别取i
摩擦
=0.16和0.22,感知距离影响分别取i
感知
= 0.55和0.30;
11.步骤二、冰雪环境下车辆行驶影响参数计算:
12.步骤2.1轮胎磨损影响计算:
13.车辆轮胎会随着不断使用而产生磨损,而轮胎磨损的增加则会导致轮胎与地面的摩擦系数不断下降,磨损程度不同摩擦系数下降程度不同,轮胎磨损影响用轮胎磨损系数i
轮胎
表示:
14.1)轮胎磨损程度小于等于50%,则相对于新轮胎,此时轮胎与地面摩擦系数未发生明显变化,i
轮胎
=1.0,
15.2)轮胎磨损程度大于50%且小于80%,则相对于新轮胎,此时轮胎与地面摩擦系数为80%~90%,i
轮胎
=0.8~0.9,
16.3)轮胎磨损程度大于80%且小于100%,则相对于新轮胎,此时轮胎与地面摩擦系数为60%~70%,i
轮胎
=0.6~0.7;
17.步骤2.2机动车动力性能影响系数计算:
18.机动车动力性能影响系数i
性能
用车辆加速性能的变化表示,即百公里加速时间,与正常路面不同的是,由于冰雪环境下路面摩擦系数变化会导致车辆加速性能会降低,因此i
性能
一般取值16.0~26.0,对于粗糙冰膜路面形态和雪下冰膜路面形态两种常见路面形态,分别取值,i
性能
=24.6和18.7;
19.步骤2.3车辆动力性能影响计算:
20.冰雪环境对车辆动力性能的影响用i
动力
表示,并由轮胎磨损程度系数i
轮胎
和机动车动力性能影响系数i
性能
组成,
21.i
动力
=i
轮胎
×i性能
22.步骤三、冰雪环境下自动驾驶车辆跟驰控制计算:
23.步骤3.1基本参数设置和计算:
24.步骤3.1.1基本参数设置:
25.1)系统反应决策时间设置:为了保证面对危险情况驾驶员有足够的时间做出接管反应,设自动驾驶车辆自主反应决策用时t《=10ms,
26.2)期望速度设置:在满足出行效率和安全需求的条件下,冰雪环境下城市道路的期望速度v0为9m/s,即32.4km/h;
27.步骤3.1.2冰雪环境下车辆最大加速度和最大减速度计算:
28.在冰雪环境下车辆行驶的最大加速度和最大减速度,在保证安全性和舒适性的前提下,会因为受到冰雪影响而相较于正常行驶环境下的最大加速度和最大减速度有所下降,所以冰雪环境下车辆最大加速度和最大减速度为:
[0029][0030][0031]
步骤3.1.3冰雪环境下的安全停车距离计算:
[0032]
在正常干燥路面上车辆行驶的安全停车距离是2.5米,但是冰雪环境下路面湿滑或形成冰膜和积雪使得车辆停车难度增加,安全停车距离s
停车
也因此而变化,
[0033]s停车
=i
冰雪
×i动力
×
2.5
[0034]
步骤3.2自动驾驶车辆跟驰控制计算:
[0035]
自动驾驶车辆的跟驰控制是通过对车辆跟驰过程中进行加速度控制实现的,实时跟驰加速度a(t)需要根据跟驰距离s、本车的实时速度v(t)和与前车的实时速度差δv进行计算:
[0036][0037]
采用上式计算的结果即为自动驾驶车辆在冰雪环境下实时跟驰加速度。
[0038]
与现有技术相比,本发明的有益效果是:
[0039]
本发明所述的一种自动驾驶车辆冰雪环境下跟驰控制方法,通过量化冰雪环境对自动驾驶车辆的影响,实现冰雪环境下自动驾驶车辆的跟驰控制,提高自动驾驶技术的适用场景,提高冰雪环境下自动驾驶安全性。
附图说明
[0040]
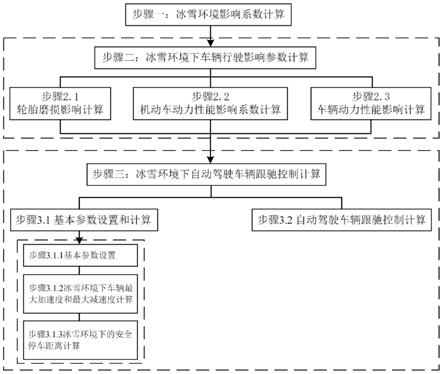
图1是本发明的总体流程图
[0041]
图2是本发明的自动驾驶车辆跟驰示意图
[0042]
图3是对自动驾驶车辆进行仿真控制的控制效果图
具体实施方式
[0043]
一、计算方法和步骤
[0044]
参阅图1,本发明所述的一种自动驾驶车辆冰雪环境下跟驰控制方法有以下几个步骤:
[0045]
步骤一、冰雪环境影响系数计算,量化计算冰雪环境对路面摩擦系数和自动驾驶感知系统的影响;
[0046]
步骤二、冰雪环境下车辆行驶影响参数计算,量化计算冰雪环境下车辆轮胎性能和动力性能变化;
[0047]
步骤三、冰雪环境下自动驾驶车辆跟驰控制计算,对自动驾驶汽车在冰雪环境相关参数的变化进行设置和计算,确定自动驾驶车辆冰雪环境下跟驰控制模型。
[0048]
二、实施例
[0049]
本发明所述的一种自动驾驶车辆冰雪环境下跟驰控制方法的实施例,给出实施过程和检验结果,但本发明的保护范围不限于下述的实施例。
[0050]
通过仿真实验进行实例论述。选取2020年12月雪后长春市某交叉口东进口道停止线后的排队车辆启动场景,停止线后共排列12辆车,将除第一辆车之后的车辆仿真设置为
自动驾驶车辆,根据本发明所述方法对自动驾驶车辆进行仿真控制,具体的控制效果如图3。
[0051]
结果表明,采用该自动驾驶跟驰控制模型,队列达到稳定跟驰状态的用时相较实际用时的132s缩短到98s,减少了25.76%,车辆间保持安全车距不发生碰撞,可以在冰雪环境下实现平稳加速和平滑控制,并且所有车辆都获得了更高的行驶速度。由此可见,采用该方法可以使自动驾驶车辆整体通行效率明显增加,总体延误降低,可以在保证安全行驶的前提下获得更高的行驶速度高效通行。