1.本实用新型属于船用锚机设备技术领域,具体涉及一种近海无人船用电动锚机。
背景技术:
2.近海无人船用电动锚机,主要是针对近海、潮滩等浅吃水工作环境近海调查无人船上使用,用于小型化无人船的起抛锚作业。新时代信息技术和控制技术的发展使得人工智能和无人系统成为当前研究的潮流,为海洋调查的发展提供了新的思路,无人船、无人自主潜器和智能浮标等新型载体将得到长足发展。目前国内这种小型无人船用锚机还比较少,一般都是有人操作的大型锚机。一般锚机都人近距离操作,根据现场情况进行各项操作,无人船用锚机需通过各种检测手段,判断锚机的使用工况,根据预先设定的程序进行各项操作。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术的不足,提供一种近海无人船用电动锚机,利用传感器检测锚机使用工况,并根据plc控制系统预先设定的工作程序,实现锚机的各项起抛锚作业和应急抛锚工作。
4.本实用新型提供一种近海无人船用电动锚机,包括卷筒装置、减速器、伺服电机、应急释放装置、传感器、公共基座、伺服器和通讯模块,伺服电机的的输出轴与减速器输入轴联接,减速器安装于卷筒装置内,与卷筒装置的驱动轴联接,卷筒装置上安装应急释放装置,卷筒装置安装于公共基座上,伺服器和通讯模块集成在控制盒内,还包括排绳装置和压绳装置,排绳装置和压绳装置分别安装在公共基座上,排绳装置上安装传感器。
5.作为本实用新型的进一步技术方案,卷筒和公共基座由不锈钢板直接机加而成,减速器通过紧固件安装于摩擦滚轮内,与摩擦轮的驱动轴联接。
6.进一步的,减速器为内藏式行星减速器。
7.进一步的,应急释放装置包括压绳块、弹簧、调节螺栓和螺母,通过调节螺栓控制弹簧的预紧力,预紧力施加到压绳块。
8.本实用新型还提供一种近海无人船用电动锚机的运行方法,包括如下步骤,
9.步骤s1,根据锚机的缆绳直径、容绳量、负载要求,选取卷筒装置,选取减速器、伺服电机,并按照缆绳负载、卷筒直径、应急释放要求,获取应急释放装置、排绳装置;
10.步骤s2,通过锚机通讯模块对锚机发送收放锚指令,通讯模块通过plc控制模块处理,对伺服器提供操作指令,控制伺服电机的运行,伺服器实时反馈电机运行状态给plc控制模块,根据预设的闭环控制程序对伺服电机进行实时控制;
11.步骤s3,当需要应急释放缆绳时,先通过人工远程确认,再由传感器和plc控制模块,给伺服电机发送操作指令。
12.与现有方案对比,本实用新型通过这种卷筒装置加排绳装置和压绳装置的结构设计,保证在收缆时无人辅助的情况下缆绳在卷筒装置能整齐有序的排列,通过锚机上的应
急释放装置、传感器、伺服器的控制系统方案,实现在无人操作的远程操作和应急释放缆绳的功能。
附图说明
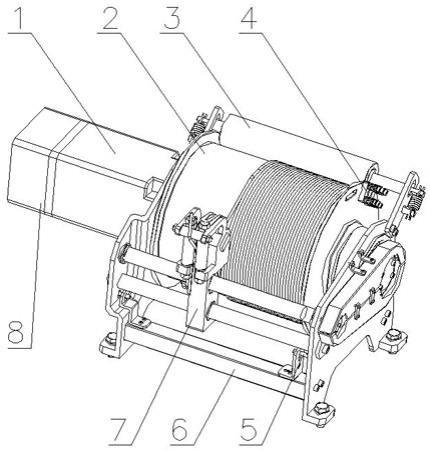
13.图1为本实用新型的结构示意图;
14.图2为本实用新型的结构侧视图;
15.图3为本实用新型的控制流程示意图。
具体实施方式
16.请参阅图1-图3,本实施例提供一种近海无人船用电动锚机,包括卷筒装置2、减速器、伺服电机1、应急释放装置4、传感器5、公共基座6、伺服器和通讯模块,伺服电机1的的输出轴与减速器输入轴联接,减速器安装于卷筒装置2内,与卷筒装置2的驱动轴联接,卷筒装置2上安装应急释放装置4,卷筒装置2安装于公共基座6上,伺服器和通讯模块集成在控制盒内,还包括排绳装置7和压绳装置3,排绳装置7和压绳装置3分别安装在公共基座6上,排绳装置7上安装传感器5。
17.卷筒装置2加排绳装置7和压绳装置3的结构型式,保证在收缆时无人辅助的情况下缆绳在卷筒装置能整齐有序的排列。
18.锚机上的应急释放装置4、传感器5、伺服器的控制系统方案,实现在无人操作的远程操作和应急释放缆绳的功能。
19.卷筒装置2通过电动伺服驱动,伺服电机1带有制动器8、转速检测功能。
20.伺服电机1与减速器相连接,减速器为内藏式行星减速器,直接安装于卷筒装置2内,减速器的输出轴直接于卷筒装置2的驱动轴联接,减少了锚机的整体外形尺寸和重量,所述内藏式行星减速器具有减速和提高输出扭矩的功能
21.卷筒装置2和公共基座6由不锈钢板直接机加而成,减少整体重量和焊接变形,减速器通过紧固件安装于摩擦滚轮内,与摩擦轮的驱动轴联接。
22.应急释放装置4包括压绳块、弹簧、调节螺栓和螺母,通过调节螺栓控制弹簧的预紧力,预紧力施加到压绳块,实现对缆绳末端拉力的控制。
23.一种近海无人船用电动锚机的运行方法,包括如下步骤,
24.步骤s1,根据锚机的缆绳直径、容绳量、负载要求,选取卷筒装置,选取减速器、伺服电机,并按照缆绳负载、卷筒直径、应急释放要求,获取应急释放装置、排绳装置;
25.步骤s2,通过锚机通讯模块对锚机发送收放锚指令,通讯模块通过plc控制模块处理,对伺服器提供操作指令,控制伺服电机的运行,伺服器实时反馈电机运行状态给plc控制模块,根据预设的闭环控制程序对伺服电机进行实时控制;
26.步骤s3,当需要应急释放缆绳时,先通过人工远程确认,再由传感器和plc控制模块,给伺服电机发送操作指令;
27.步骤s4、重复s2步骤,完成近海无人船锚机的收放锚作业任务;
28.步骤s5、结束工作。
29.该装置通过这种卷筒装置加排绳装置和压绳装置的结构设计,保证在收缆时无人辅助的情况下缆绳在卷筒装置能整齐有序的排列,通过锚机上的应急释放装置、传感器、伺
服器的控制系统方案,实现在无人操作的远程操作和应急释放缆绳的功能。
30.以上显示和描述了本实用新型的基本原理、主要特征和优点。本领域的技术人员应该了解,本实用新型不受上述具体实施例的限制,上述具体实施例和说明书中的描述只是为了进一步说明本实用新型的原理,在不脱离本实用新型精神范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护的范围由权利要求书及其等效物界定。
技术特征:
1.一种近海无人船用电动锚机,包括卷筒装置、减速器、伺服电机、应急释放装置、传感器、公共基座、伺服器和通讯模块,所述伺服电机的输出轴与所述减速器输入轴联接,所述减速器安装于所述卷筒装置内,与所述卷筒装置的驱动轴联接,所述卷筒装置上安装所述应急释放装置,所述卷筒装置安装于所述公共基座上,所述伺服器和所述通讯模块集成在控制盒内,其特征在于,还包括排绳装置和压绳装置,所述排绳装置和所述压绳装置分别安装在所述公共基座上,所述排绳装置上安装所述传感器。2.根据权利要求1所述的一种近海无人船用电动锚机,其特征在于,所述卷筒和所述公共基座由不锈钢板直接机加而成,所述减速器通过紧固件安装于摩擦滚轮内,与摩擦轮的驱动轴联接。3.根据权利要求1所述的一种近海无人船用电动锚机,其特征在于,所述减速器为内藏式行星减速器。4.根据权利要求1所述的一种近海无人船用电动锚机,其特征在于,所述应急释放装置包括压绳块、弹簧、调节螺栓和螺母,通过所述调节螺栓控制弹簧的预紧力,预紧力施加到压绳块。
技术总结
一种近海无人船用电动锚机,包括卷筒装置、减速器、伺服电机、应急释放装置、传感器、公共基座、伺服器和通讯模块,伺服电机的的输出轴与减速器输入轴联接,减速器安装于卷筒装置内,与卷筒装置的驱动轴联接,卷筒装置上安装应急释放装置,卷筒装置安装于公共基座上,伺服器和通讯模块集成在控制盒内,还包括排绳装置和压绳装置,排绳装置和压绳装置分别安装在公共基座上,排绳装置上安装传感器。该装置利用传感器检测锚机使用工况,并根据PLC控制系统预先设定的工作程序,实现锚机的各项起抛锚作业和应急抛锚工作。作业和应急抛锚工作。作业和应急抛锚工作。
技术研发人员:李建平 陈建锋 周道清 许飞 王浩
受保护的技术使用者:南京中船绿洲机器有限公司
技术研发日:2020.09.23
技术公布日:2022/1/18