1.本发明涉及海洋观测技术领域,具体涉及一种用于坐底式海床基观测系统失去自浮能力后的打捞装置及方法。
背景技术:
2.坐底式海床基观测系统是海洋环境监测领域十分重要的技术装备,与海表浮标观测系统、空基遥感观测系统共同组成了全方位立体的海洋观测体系。坐底式海床基观测系统是目前海洋科学观测领域用于长期、定点获取海底及水体剖面环境参数数据的重要科研装置。
3.坐底式海床基观测系统布放后,在海底进行一定周期的数据获取,一个周期后,科研人员根据预订时间乘船到达布放海域进行回收。正常情况下,坐底式海床基观测系统除了搭载获取数据所必须的传感器之外,还需要配载释放装置,通常释放装置主要由声学释放器、浮球、回收缆等组成。科研人员通过控制释放器释放浮球,浮球携回收缆的一端上浮至水面,进而实现坐底式海床基观测系统的常规回收。
4.针对这种应用广泛的坐底式海床基观测系统,在应用过程中会发生无法正常回收的情况,即失去自浮能力,必须人为打捞。例如:1)海床基观测系统在海底被渔船拖网挂住,在渔网的拖拽力下发生了倾倒,导致声学释放器向下颠倒,浮球释放后被扣在倾倒的海床基下方无法浮上水面;2)被废弃的流动渔网挂住,流网覆盖在海床基上方,声学释放器释放浮球后,浮球被绕进了流网中无法浮上水面;3)浮球被其他杂物或海生物卡住,无法上浮;4)声学释放器电量耗尽,无法接收释放命令;5)河口或极端天气影响导致潜标被泥沙覆盖,释放器无法接收信号,浮球无法释放,等等。该问题在我国近海观测领域显得尤为突出,尤其在舟山群岛附近海域,由于捕捞作业频繁、废弃流网很多,导致很多科研单位在该海域布放的海床基无法正常回收,造成很大的科研损失。目前,对这一类失去自浮能力的坐底式海床基观测系统的打捞多是采用潜水员下潜搜寻的方式,对于浅水区域且流速缓慢能见度高的海洋环境比较适用,但通常研究热点海域海洋环境都比较复杂,大多情况下专业重型潜水员也无法下潜。
5.针对海底观测出现的此类问题,中国专利cn201911064236.0公开了释放器失灵潜标的回收装置及其回收方法,该装置具有成本低、效率高等优点,但是该装置针对性太强,只能对海底垂直排布且用缆系连接的潜标系统具有回收能力(通过特殊设计的打捞钩钩住潜标上的缆系),而对于坐底式海床基观测系统没有抓力点,不具备回收能力;此外,该装置的使用需要两艘渔船协调配合才能实现,操作复杂,风险高。
技术实现要素:
6.本发明要解决的技术问题在于针对上述现有技术存在的不足,提供一种用于坐底式海床基观测系统失浮后的打捞装置及方法,针对失去自浮能力的坐底式海床基观测系统进行人为打捞回收。
7.本发明为解决上述提出的技术问题所采用的技术方案为:
8.一种用于坐底式海床基观测系统失浮后的打捞装置,包括作业渔船、总拖带缆、分支拖带缆、拖杆装置和拖钩装置;
9.所述拖杆装置包括拖杆和沿所述拖杆的长度方向分布的若干拖拉调节装置,所述拖拉调节装置整体转动安装于所述拖杆的一侧,并能绕拖杆的轴线向上或向下旋转90
°
,拖拉调节装置包括相互垂直设置的挡泥板a和挡泥板b,当所述挡泥板a水平接触海底时,所述挡泥板b竖直向上,当所述挡泥板b水平接触海底时,所述挡泥板a竖直向上;
10.所述拖钩装置布置于所述拖杆的另一侧,并沿拖杆的长度方向设置若干个,每一拖钩装置包括一拖钩,所述拖钩的直径不大于坐底式海床基观测系统上导流孔的孔径,以便在打捞过程中拖钩能伸入导流孔中;
11.所述分支拖带缆的数量与所述拖拉调节装置的数量相等且一一对应连接,每一分支拖带缆的下端连接一个拖拉调节装置、上端连接所述总拖带缆的下端,所述总拖带缆的上端与所述作业渔船连接。
12.上述方案中,所述拖拉调节装置还包括设置于所述挡泥板a与挡泥板b之间的中间拖板,所述中间拖板的端部为拖拉调节装置与分支拖带缆的连接点。
13.上述方案中,所述中间拖板安装于所述挡泥板a与挡泥板b的角平分线上。
14.上述方案中,所述若干拖拉调节装置关于所述拖杆中点位置处的横截面对称分布。
15.上述方案中,所述拖杆呈水平方向布置,其长度方向与作业渔船的运动方向垂直。
16.上述方案中,所述拖钩装置还包括连接缆和连接环,所述连接环固定安装于所述拖杆上,且位于水平面内,所述连接缆一端连接所述连接环、另一端连接所述拖钩;所述拖钩为钢制多爪拖钩。
17.上述方案中,所述连接缆的长度小于相邻两个连接环的间距;所述连接环的间距和数量设定规则为:两个相邻的拖钩外径之间的距离要小于被打捞目标的边长,以保证拖钩的外齿能挂到侧板上的导流孔。
18.上述方案中,所述打捞装置还包括设置于所述拖拉调节装置同侧的挑枪,所述挑枪沿所述拖杆的长度方向设置若干根,且均位于水平面内;所述挑枪的长度不大于所述挡泥板a或挡泥板b的长度。
19.上述方案中,所述挑枪的直径不大于坐底式海床基观测系统上导流孔的孔径,以便在打捞过程中拖钩能伸入导流孔中。
20.相应的,本发明还提出一种用于坐底式海床基观测系统失浮后的打捞方法,采用上述用于坐底式海床基观测系统失浮后的打捞装置,包括以下步骤:
21.s1、作业渔船携打捞装置达到坐底式海床基观测系统所在海域,在下流区下放打捞装置;
22.s2、在打捞装置沉入海底后,开船逆流拖带,经过布放点位,当船速有明显变化时,说明打捞装置有挂载到东西,此时依次回收总拖带缆和分支拖带缆,并查看打捞装置是否钩住坐底式海床基观测系统,若打捞成功则将坐底式海床基观测系统回收至作业渔船上,打捞任务完成;
23.s3、若没有打捞成功,则通过作业渔船携打捞装置再开至海床基站位下游,再次下
放打捞装置,进行拖带,每次拖带路径与上一次拖带路径相邻,以保证对海域的完整搜索,并保证从起点开始拖带,一直拖到超过海床基站位,直至打捞成功为止。
24.本发明的有益效果在于:
25.1、打捞成功率高:1)本发明打捞装置在拖杆的后端一侧设置了拖钩装置,拖钩的挂载能力强,可通过单船灵活作业,以类似犁地的形式进行一定范围内海域的搜寻,对目标的挂载成功率高,基本只需一个周期的搜寻即可成功打捞目标;2)本发明打捞装置在拖杆的前端一侧还设置了一排挑枪,一方面能将坐底式海床基观测系统上覆盖的渔网挂住并向前拖带,尽量露出海床基本体,为拖钩挂住海床基留出空间,另一方面,挑枪也具有挂载海床基本体的作用,增加了打捞概率,当挑枪首先插入海床基侧板的导流孔,则可直接将其回收;
26.3)本发明打捞装置在拖杆的前端一侧还设置了可转动的拖拉调节装置,能够有效保证打捞装置沉入海底时拖钩装置与挑枪都呈水平状态,防止插入泥中。
27.2)制作成本低廉,操作简单:本发明基于一艘小型拖网渔船的拖带能力设计,配合拖杆、拖钩装置,使渔船以常规捕捞拖底网的作业方式进行失浮坐底式海床基观测系统的打捞回收;此外,单船作业操作灵活。
附图说明
28.下面将结合附图及实施例对本发明作进一步说明,附图中:
29.图1是本发明打捞装置的打捞目标坐底式海床基观测系统的结构示意图;
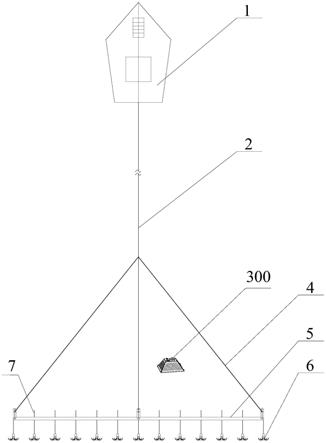
30.图2是本发明打捞装置的整体结构示意图;
31.图3是本发明打捞装置的水下主体布放的工作示意图;
32.图4是本发明打捞装置的局部结构示意图;
33.图中:1、作业渔船;2、总拖带缆;4、分支拖带缆;5、拖杆装置;51、拖杆;52、拖拉调节装置;521、挡泥板a;522、挡泥板b;523、轮子a;524、轮子b;525、中间拖板;526、加强筋a;527、加强筋b;6、拖钩装置;61、拖钩;62、连接缆;63、连接环;7、挑枪;
34.300、坐底式海床基观测系统;301、侧板;302、观测设备;303、声学释放器浮球系统;304、导流孔。
具体实施方式
35.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
36.如图1所示,为本发明打捞装置的打捞目标——坐底式海床基观测系统300,是已市场化的成熟产品,可以根据观测海域特定设计为四边形、六边形或八边形,具有4个或者6个或8个侧板301,侧板301上设有导流作用的导流孔304;顶部设有若干观测设备302,观测设备302的数量和型号可根据具体需求任意加装组合;顶部还设有一个声学释放器浮球系统303,声学释放器浮球系统303也是成熟产品,通常使用的品牌为edgetech sport,型号为pop-up。
37.如图2所示,为本发明实施例提供的一种用于坐底式海床基观测系统失浮后的打捞装置,包括作业渔船1、总拖带缆2、分支拖带缆4、拖杆装置5、拖钩装置6和挑枪7。
38.作业渔船1为具有一定拖网能力和经验的渔船,数量为一艘,作业渔船1通过总拖带缆2和分支拖带缆4与拖杆装置5连接,拖带拖杆装置5进行海底打捞作业。
39.拖杆装置5包括拖杆51和沿拖杆51的长度方向分布的若干拖拉调节装置52。其中,拖杆51为中空、圆杆形的钢制杆件,其长度根据海域特点和水深以及作业渔船1的拖带能力设计,一般情况下其长度可以设计为与作业渔船1船长相近;拖杆51呈水平方向,其长度方向与作业渔船1的运动方向垂直。拖拉调节装置52整体转动安装于拖杆51的前端一侧,并能绕拖杆51的中轴线向上或向下旋转90
°
;拖拉调节装置52包括相互垂直设置的挡泥板a521和挡泥板b522,挡泥板a521与挡泥板b522的角平分线上设置中间拖板525,中间拖板525的端部为拖拉调节装置52与分支拖带缆4的连接点。由于这三块板子可整体向上或向下旋转90
°
,则沉入海底后要么挡泥板a521呈水平、挡泥板b522呈竖直,要么挡泥板b522呈水平、挡泥板a521呈竖直。
40.拖钩装置6布置于拖杆51的后端一侧,并沿拖杆51的长度方向均匀设置若干个。每一拖钩装置6包括一拖钩61、一连接缆62和一连接环63,连接环63固定安装于拖杆51上,且呈水平方向,连接缆62一端连接连接环63、另一端连接拖钩61。拖钩61为钢制4至6爪拖钩,拖钩61尖端爪的直径不大于坐底式海床基观测系统上导流孔的孔径,以便在打捞过程中拖钩61能伸入导流孔中。连接缆62的长度小于相邻两个连接环63的间距,以减小相邻两个拖钩61相互碰撞的概率,提高拖带效率。连接环63的间距和数量设定规则:两个相邻的拖钩61外径之间的距离要小于被打捞目标的边长,以保证拖钩61的外齿能挂到侧板301上的导流孔304。
41.挑枪7设置于拖杆51的前端一侧,与拖拉调节装置52位于同侧,挑枪7沿拖杆51的长度方向设置若干根,且呈水平方向。挑枪7具有两方面的作用,首先是挑走渔网,若坐底式海床基观测系统上覆盖有大面积渔网,则挑枪7首先将渔网挂住并向前拖带,尽量露出海床基本体,为拖钩61挂住海床基留出空间;其次,挑枪7也具有挂载海床基本体的作用,增加了打捞概率,当挑枪7首先插入海床基侧板301的导流孔304,则可直接将其回收,因此,挑枪7的直径设计为不大于坐底式海床基观测系统上导流孔304的孔径。
42.由于打捞装置在入水后有可能翻转,若挡泥板a521一面先着海底,则其成水平状态,防止挑枪7和拖钩装置6扎入泥中,而挡泥板b522呈竖直向上的闲置状态;若挡泥板b522一面先着海底,则其呈水平状态,挡泥板a521竖直向上。因此,挑枪7的长度设计为不大于挡泥板a521或挡泥板b522的长度,保证挡泥板a521或挡泥板b522先着海底。
43.分支拖带缆4的数量与拖拉调节装置52的数量相等且一一对应连接,每一分支拖带缆4的下端连接一个拖拉调节装置52、上端连接总拖带缆2的下端,总拖带缆2的上端与作业渔船1连接。中间拖板525为主要的受力部件,与分支拖带缆4连接,不论挡泥板a521还是挡泥板b522朝下,分支拖带缆4均呈向上45
°
,方便拖带。
44.进一步优化,挡泥板a521端部设置轮子a523,挡泥板b522端部设置轮子b524,便于拖带过程中整套装置的前进,且不易扎入泥土中。连接挡泥板a521与中间拖板525之间设置加强筋a526,连接挡泥板b522与中间拖板525设置加强筋b527,加强筋用于加固连接中间拖板525和其两侧的挡泥板。
45.进一步优化,若干拖拉调节装置52关于拖杆51的中点位置处的横截面对称分布。拖拉调节装置52的数量优选为奇数,其中一个拖拉调节装置52布置于拖杆51的中点位置,
其他拖拉调节装置52关于拖杆51的中点位置处的横截面对称分布。本实施例中,拖拉调节装置52的数量为三个,分别布置于拖杆51的中点及两端,分支拖带缆4相应设置三根;在其他实施例中也可以根据实际需要在左右对称位置增加两个拖拉调节装置52和两根分支拖带缆4。
46.进一步优化,总拖带缆2一般为拖网渔船常用的包塑钢缆或高强度拖带缆,其长度一般设计为水深的2.5倍至3倍。
47.进一步优化,分支拖带缆4一般为高强度拖带缆,其每根的长度一般设计为与拖杆51的长度相当,便于在船上起吊等操作,同时便于拉拖杆时控制拖杆的平衡。
48.相应的,本发明还提出一种用于坐底式海床基观测系统失浮后的打捞方法,当坐底式海床基观测系统完成一个周期观测后,回收失败,无法实现自浮时,采用上述打捞装置进行打捞,具体包括以下步骤:
49.s1、作业渔船1携打捞装置达到坐底式海床基观测系统所在海域,在下流区下放打捞装置:先将拖杆51整体起吊,拖钩装置6先入水,拖杆51再入水,缓慢下放分支拖带缆4和总拖带缆2,在拖杆51重力的作用下,打捞装置沉入海底。
50.s2、在打捞装置沉入海底后,开船逆流拖带,经过布放点位,当船速有明显变化时,说明打捞装置有挂载到东西,此时依次回收总拖带缆2和分支拖带缆4,并查看打捞装置是否钩住坐底式海床基观测系统,若打捞成功则将坐底式海床基观测系统回收至作业渔船1上,打捞任务完成。
51.s3、若没有打捞成功,则通过作业渔船1携打捞装置再开至海床基站位下游,再次下放打捞装置,进行拖带,此时要注意,每次拖带路径与上一次拖带路径相邻,以保证对海域的完整搜索,并保证从起点开始拖带,一直拖到超过海床基站位,直至打捞成功为止。
52.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。