1.本发明涉及水下作业设备技术领域,特别涉及一种通航水域应急扫测用潜航器及使用方法。
背景技术:
2.通航水域应急扫测是针对可能影响通航安全的突发事件,对所在水域进行紧急扫海测量,以确定沉船、沉物的位置、性质、高度、姿态等,一般海难海损事故发生后,通常要对事故水域进行封航,为了尽快解除封航和减少经济损失,就需要快速、准确的判明沉船、沉物。
3.常用的扫测仪器有多波速探测和扫测声呐,其中多波速的优点是定位精度高,能够进行三维可视化分析,但其适用范围不如扫测声呐,扫测声呐的优点是具有较高的分辨率,能够区分目标物的底质特征,缺点是定位精度稍差,并且容易受到工作环境的影响产生噪声,二者同时应用具有互补性,可提高目标解译的准确性。
4.扫测声呐仪通常安装在拖体上,多波速探测仪大多数安装在船体上,安装了这两种仪器的拖体或船体只有在工作海况:海浪高度小于2m、风力小于6级时才可进行扫测工作,而海难海损事故多发生于海况恶劣时,所以常无法出海,延误扫测时间更延误通航,造成巨大经济损失。因海水表面密度小受风浪作用大,随着深度的增加,海水密度变大受风浪作用变小,所以可以用潜航器来带动这两种仪器工作,但现有的潜航器多用于军事或科研等,现还没有专用于通航水域应急扫测潜航器的可行方案。
5.为此,本技术设计了一种专用于通航水域应急扫测的潜航器,以解决上述问题。
技术实现要素:
6.本发明为了弥补现有技术中的不足,提供了一种通航水域应急扫测用潜航器及使用方法。
7.一种通航水域应急扫测用潜航器,包括潜航器壳:所述潜航器壳的前部呈水滴状,在潜航器壳的最前端安装有正前方摄像头,在潜航器壳的前部水滴弧形的过渡段上分别安装有前下方摄像头、前上方摄像头、左前方摄像头和右前方摄像头;所述潜航器壳的壳身中前部和中后部外径分别安装有若干壳身中前部摄像头和壳身中后部摄像头;所述潜航器壳的前下方设置有多波速侧头;所述潜航器壳的壳身后部设有垂直翼和水平翼及螺旋桨翅;所述潜航器壳内中部下方垂直固定有电动伸缩天线的机体下部和其动力伺服电机c,电动伸缩天线的机体上部通过法兰和密封圈及螺栓固定在潜航器壳的内顶壁上,电动伸缩天线的天线可伸长工作部分在潜航器壳外的顶上;所述潜航器壳内通过高压气瓶固定杆垂直固定三个高压气瓶,高压空气压缩机通
过高压气管向三个高压气瓶供气,每个高压气瓶上都装有高压气管,每个高压气瓶可向三个压载水仓输送高压气体;所述潜航器壳内后部安装有锂电池及控制器,向各用电部件间供电,所有电气部件还通讯连接plc控制器,对plc控制器输入各电控部件的控制程序及图像分析软件,plc控制器配有无线和水声通讯模块可实现远程操控潜航器,潜航器也可依据编程自主完成通航水域应急扫测工作和自主避障返回。
8.进一步地,为了更好的实现本发明,所述潜航器壳的材质为非金属碳纤维或玻璃钢或不锈钢或防锈铝或钛合金。
9.进一步地,为了更好的实现本发明,所述潜航器壳的壳身中上部设有潜航器起吊环,在起吊环的左边设有电动伸缩天线,在电动伸缩天线的左边设有盖板,盖板的下方装有密封板,密封板位于盖板和框板之间,框板四周焊封在潜航器壳的内表面上,盖板和密封板通过内六方螺栓压固在框板上,盖板的顶面设有开启柄。
10.进一步地,为了更好的实现本发明,所述多波速测头的右边设有防水插头,防水插头通过导线连接电缆收放装置,电缆收放装置通过固定架装在潜航器壳的壳身下方中部,电缆收放装置上的槽轮内缠绕有超细高强度柔性双路电缆,超细高强度柔性双路电缆可吊置扫测声呐仪并向扫测声呐仪供电及传输数据。
11.进一步地,为了更好的实现本发明,所述螺旋桨翅外设有防护罩,螺旋桨翅固定在螺旋桨轴上,螺旋桨轴为螺旋桨推进电机的轴,在螺旋桨轴与潜航器壳之间装有动密封圈,螺旋桨推进电机通过螺旋桨电机固定杆由潜航器壳内壁固定,高压空气压缩机通过压缩机固定杆由潜航器壳内壁固定,伺服电机a和伺服电机b为一体结构,通过机翼电机固定杆由潜航器壳内壁固定,其两电机轴相互垂直,其中伺服电机a的轴为双出轴a,在双出轴a的上下分别装有垂直翼,伺服电机b的轴为双出轴b,在双出轴b的左右分别装有水平翼。
12.进一步地,为了更好的实现本发明,所述高压气瓶容量为12至80升,额定工作压力为10~40mpa的潜艇专用气瓶,高压空气压缩机为潜水充气式,其额定工作压力为20~30mpa。
13.进一步地,为了更好的实现本发明,所述潜航器壳内底面通过隔板分隔出九个压载水仓,压载水仓通过侧面固定板和底部固定板将压载水仓固定在潜航器壳的内壁上,每个压载水仓的顶板上都设有出气电磁阀和雷达液位计及进气电磁阀和压力传感器,在每个压载水仓的底部都设有进出海水电磁阀。
14.基于上述的通航水域应急扫测用潜航器,其使用方法为:s1,使用时,潜航器使电动伸缩天线的伸缩端顶部探出海面,进行高速通信传输;s2,潜航器的各监控摄像头均配有水下强光led灯珠,将周围的海况影像传送至还上或路上操作平台,潜航器依据plc控制器的编程进行自主避障潜行;s3,plc控制器根据多波速测头和扫测声呐仪传回的扫测信息重要程度情况,依据编程适时加密扫测,并将扫测结果发送至海陆操控平台;s4,plc控制器依据编程控制电缆收放装置工作,使扫测声呐仪下潜到更深的底部,距可疑目标更近,使plc控制器12收到更清晰图像;s5,plc控制器控制螺旋桨推进电机工作,使潜航器具备前行动力,plc控制器控制伺服电机a工作,垂直翼转动一定角度,可使潜航器的“水滴”头部向左或右行进,plc控制器
控制伺服电机b工作,水平翼转动一定角度,可使潜航器的“水滴”头部向上或下行进;s6,plc控制器控制进出海水电磁阀和出气电磁阀开启,则海水由电磁阀进入压载水仓内,顶板上的雷达液位计实时将液位值传送至plc控制器,plc控制器再根据船舶水平姿态仪数据情况适时控制关闭相关进出海水电磁阀和出气电磁阀,使潜航器下潜至要达到的深度;s7,当潜航器需要上浮时,plc控制器控制某些进气电磁阀开启,高压气体进入压载水仓内,当压力传感器感知的压力到达编程设定值,则plc控制器控制进出海水电磁阀开启,使压载水仓内的海水经电磁阀排出,当雷达液位计检测到压载水仓内的水位下降到规定值,则plc控制器控制电磁阀和进气电磁阀关闭;s8,plc控制器依据编程通过控制压载水仓内的水位,来控制潜航器的重量,实现潜航器下沉或上浮或悬浮于某一深度。
15.本发明的有益效果是:在海浪高度高于2m、风力大于6级时的恶劣海况环境下,本发明的专用潜航器可以取代传统的船体,由于海中下潜深度越深,海况越良好,所以本发明的潜航器可以携带着扫测仪器,在水下某深度满足扫测仪器波动规定要求情况下进行扫测工作,达到不延误扫测时间、提高扫测质量和效率、尽快通航,减少经济损失的目的。
附图说明
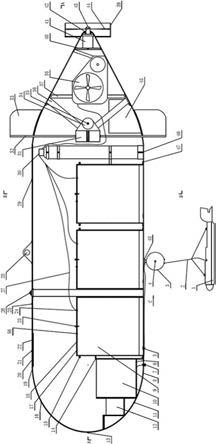
16.图1为本发明的主视剖视图;图2为本发明的图1的a-a处剖面俯视图;图3为本发明的图1的b-b处剖面左视图;图4为本发明的潜航器在不同深度状态示意图;图5为本发明的控制原理图;图6为本发明的图1的框板部分的局部放大图。
17.图中,1、扫测声呐仪,2、超细高强度柔性双路电缆,3、槽轮,4、电缆收放装置,5、进出海水电磁阀,6、防水接头,7、多波速测头,8、潜航器壳,9、压载水仓,10、多波束测试仪,11、前下方摄像头,12、plc控制器,13、正前方摄像头,14、固定板,15、侧面固定板,16、前上方摄像头,17、顶板,18、出气电磁阀,19、框板,20、盖板,21、开启柄,22、密封板,23、雷达液位计,24、进气电磁阀,25、壳身中前部摄像头,26、电动伸缩天线,27、高压气管,28、潜航器起吊环,29、壳身中后部摄像头,30、高压气瓶,31、伺服电机a,32、双出轴a,33、垂直翼,34、伺服电机b,35、双出轴b,36、机翼电机固定杆,37、压缩机固定杆,38、高压空气压缩机,39、防护罩,40、螺旋桨电机固定杆,41、螺旋桨推进电机,42、动密封圈,43、螺旋桨轴,44、螺旋桨翅,45、锂电池及控制器,46、高压气瓶固定杆,47、底部固定板,48、固定架,49、左前方摄像头,50、右前方摄像头,51、隔板,52、伺服电机c,53、水平翼,54、海面,55、船舶水平姿态仪,56、压力传感器。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
19.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
21.在本发明的描述中,需要说明的是,术语“中”、“上”、“下”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
22.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
23.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电性连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
25.图1-图6为本发明的一种具体实施例,该实施例主体为潜航器壳8,潜航器壳8可采用非金属碳纤维或玻璃钢及金属不锈钢、防锈铝、钛合金等制作,潜航器壳8的前部为水滴状,最前端装有正前方摄像头13、在“水滴”状过渡段上分别有前下方摄像头11、前上方摄像头16、左前方摄像头49、右前方摄像头50,在潜航器壳8的壳身中前部和中后部外径向分别装有多个壳身中前部摄像头25和壳身中后部摄像头29。
26.在潜航器壳8的壳身中上部设有潜航器起吊环28,在起吊环28的左边设有电动伸缩天线26,在电动伸缩天线26的左边设有盖板20,盖板20的下方装有密封板22,密封板22位于盖板20和框板19之间,框板19四周焊封在潜航器壳8的内表面上,盖板20和密封板22通过内六方螺栓压固在框板19上,盖板20的顶面设有开启柄21。
27.在潜航器壳8的前下方设有多波速测头7,在多波速测头7的右边设有防水插头6,防水插头6通过导线连接电缆收放装置4,电缆收放装置4通过固定架48装在潜航器壳8的壳身下方中部,电缆收放装置4上的槽轮3内缠绕有超细高强度柔性双路电缆2,超细高强度柔性双路电缆2可吊置扫测声呐仪1并向扫测声呐仪1供电及传输数据。
28.潜航器壳8的壳身后部设有垂直翼33和水平翼53及螺旋桨翅44,在螺旋桨翅44外设有防护罩39。螺旋桨翅44固定在螺旋桨轴43上,螺旋桨轴43为螺旋桨推进电机41的轴,在螺旋桨轴43与潜航器壳8之间装有动密封圈42,螺旋桨推进电机41通过螺旋桨电机固定杆40由潜航器壳8内壁固定,高压空气压缩机38通过压缩机固定杆37由潜航器壳8内壁固定,
伺服电机a31和伺服电机b34为一体结构通过机翼电机固定杆36由潜航器壳8内壁固定,其两电机轴相互垂直,其中伺服电机a31的轴为双出轴a32,在双出轴a32的上下分别装有垂直翼33,伺服电机b34的轴为双出轴b35,在双出轴b35的左右分别装有水平翼53。
29.在潜航器壳8内中部下方垂直固定有电动伸缩天线26的机体下部和其动力伺服电机c52,电动伸缩天线26的机体上部通过法兰和密封圈及螺栓固定在潜航器壳8的内顶壁上,电动伸缩天线26的天线可伸长工作部分在潜航器壳8外的顶上。
30.潜航器壳8内通过高压气瓶固定杆46垂直固定三个高压气瓶30,高压气瓶容量为12至80升,额定工作压力为10~40mpa潜艇专用气瓶。高压空气压缩机38为潜水充气式、额定工作压力为20~30mpa, 高压空气压缩机38通过高压气管向三个高压气瓶30供气,每个高压气瓶30上都装有高压气管27,每个高压气瓶30可向三个压载水仓9输送高压气体,潜航器壳8内底面通过隔板51分隔九个压载水仓9,压载水仓9通过侧面固定板15和底部固定板47将压载水仓9固定在潜航器壳8的内壁上。每个压载水仓9的顶板17上都设有出气电磁阀18和雷达液位计23及进气电磁阀24和压力传感器56,在每个压载水仓9的底部都设有进出海水电磁阀5。
31.锂电池及控制器45向各用电部件提供电能。锂电池及控制器45、各进出海水电磁阀5、出气电磁阀18、雷达液位计23、进气电磁阀24、压力传感器56、伺服电机a31、伺服电机b34、高压空气压缩机38、螺旋桨推进电机41、伺服电机c52、多波束测试仪10、扫测声呐仪1、电缆收放装置4、船舶水平姿态仪55、各监控摄像头等均与plc控制器12有线或无线连接,对plc控制器12输入各电控部件的控制程序及图像分析软件,plc控制器12配有无线和水声通讯模块可实现远程操控潜航器,潜航器也可依据编程自主完成通航水域应急扫测工作和自主避障返回。
32.本实施例的具体使用方法如下:在正常或恶劣海况下都可使用该通航水域应急扫测用潜航器,潜航器配备多波速测头7和扫测声呐仪1,就算海面上的风力超过6级、海浪高于2m,但潜航器下潜越深,水流等海况越稳定,该潜航器在海平面下方的适宜深度仍可正常有效的进行通航水域应急扫测工作,虽然潜航器配备了水声通讯模块,但由于水声通讯存在传播速率低、时延大、可靠性低等特性,所以配备了电动伸缩天线26,潜航器可使电动伸缩天线26的伸缩端顶部探出海平面进行高速通信传输或依据编程周期性上浮探出,见附图5所示。
33.潜航器上的各监控摄像头均配有水下强光led灯珠,可将周围的海况影像传送至海上或陆上操控平台,潜航器可依据plc控制器12的编程进行自主避障潜行。plc控制器12根据多波速测头7和扫测声呐仪1传回的扫测信息重要程度情况,依据编程适时加密扫测,并将扫测结果发送至海陆操控平台。
34.plc控制器12依据编程控制电缆收放装置4工作,使扫测声呐仪1下潜到更深的底部,距可疑目标更近,使plc控制器12收到更清晰图像,而潜航器无需潜到更深的区域。这也使潜航器上的多波速测头7能探测到更大的区域范围,提高扫测效率。
35.plc控制器12控制螺旋桨推进电机41工作,使潜航器具备前行动力,plc控制器12控制伺服电机a31工作,垂直翼33转动一定角度,可使潜航器的“水滴”头部向左或右行进,plc控制器12控制伺服电机b34工作,水平翼53转动一定角度,可使潜航器的“水滴”头部向上或下行进。
36.plc控制器12控制进出海水电磁阀5和出气电磁阀18开启,则海水由电磁阀5进入压载水仓9内,顶板17上的雷达液位计23实时将液位值传送至plc控制器12,plc控制器12再根据船舶水平姿态仪55数据情况适时控制关闭相关进出海水电磁阀5和出气电磁阀18,使潜航器下潜至要达到的深度。
37.当潜航器需要上浮时,plc控制器12控制某些进气电磁阀24开启,高压气体进入压载水仓9内,当压力传感器56感知的压力到达编程设定值,则plc控制器12控制进出海水电磁阀5开启,使压载水仓9内的海水经电磁阀5排出,当雷达液位计23检测到压载水仓9内的水位下降到规定值,则plc控制器12控制电磁阀5和进气电磁阀24关闭。
38.plc控制器12依据编程通过控制压载水仓9内的水位,来控制潜航器的重量,实现潜航器下沉或上浮或悬浮于某一深度。潜航器可依据编程自主完成通航水域应急扫测工作和自主避障返回。
39.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其他修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。