1.本实用新型涉及潜航器领域,尤其涉及一种自主式近海域水下监控潜航器和系统。
背景技术:
2.随着对海洋资源的开发,海洋经济在对国民经济的贡献占比逐年提高;据《2019年中国海洋经济统计公报》,2019年中国海洋经济总产值超过8.9万亿元;其中近海域的海洋渔业、海洋交通业、海洋旅游业、近海资源勘探、海底电力和通信服务等贡献巨大;目前针对民用近海域水下设施设备的监控主要采用专业人员定期巡检、具备某些特定功能的载人潜航器(hov)或遥控式无人潜航器(rov)进行定期巡检,而具备自主控制能力的无人潜航器(auv)的应用大多在军事领域上。
3.目前现有的潜航器存在以下明显的不足:1.遥控式无人潜航器(rov)需要连接线缆进行操控,而且作业时需要收纳线缆的辅助船只进行支持。2.由于遥控式无人潜航器需要水面船只进行支持,在海况恶劣的情况下遥控式无人潜航器的作业会受到影响。3.随着海洋经济发展,未来需要潜航器作业的面积将十分巨大,依靠遥控式无人潜航器和载人式潜航器点对点的作业模式难以高效覆盖。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种用于近海水域海洋经济建设中满足机器视觉式监控使用需求的、精简人员并提高效率的自主式近海域水下监控潜航器和系统。
5.技术方案如下:一方面:
6.一种自主式近海域水下监控潜航器,包括艇首本体,还包括:
7.方向舵,与所述艇首本体通过轴连接,所述方向舵并设置在所述艇首本体的前端两侧;
8.摄像机,安装在所述透明壳体内;所述摄像机底下设有安装板,所述安装板包括两侧的卡扣片和底部的定位片,所述安装板用于固定所述摄像机;
9.透明壳体,与所述所述艇首本体可拆卸连接,所述透明壳体安装在所述摄像机的外部,呈半球形;
10.所述艇首本体,还包括主设备舱、动力舱和安定面,所述安定面包括设置在所述艇首本体的两个水平安定面和两个垂直安定面。
11.进一步地,还包括主控芯片组、电机组和电池组;所述主控芯片组设置在所述艇首本体内部,所述主控芯片组与所述摄像机连接;所述方向舵、所述水平安定面和所述垂直安定面分别与对应的所述电机组连接;所述电机组分别与所述主控芯片组连接;所述电池组设置在所述艇首本体的内部。
12.进一步地,还包括通信浮标,所述通信浮标设置在所述艇首本体的上方;所述艇首本体上方设有收纳舱,所述通信浮标于所述收纳舱可拆卸连接。
13.进一步地,所述通信浮标通过数据线缆与所述艇首本体连接,所述数据线缆与所述主控芯片组连接。
14.进一步地,还包括声呐阵列,所述声呐阵列设置在所述艇首本体的前端和两侧。
15.进一步地,所述艇首本体还包括:前部浮力储备舱,为环形结构,设置在所述艇首本体的前端;后部浮力储备舱,为环形结构,设置在所述艇首本体的后端;进水口;推力泵,所述推力泵采用喷水式泵,并配有可偏转的三维轴对称矢量结构喷口。
16.进一步地,所述方向舵,包括与所述艇首本体一侧设置的转向部,所述转向部内部设置有十字轴。
17.进一步地,所述透明壳体,采用高透明度石英玻璃、高透明度陶瓷玻璃或高透明度pc塑料制成。
18.进一步地,所述摄像机,为球形摄像机,采用ai摄像机。
19.另一方面,还提供一种自主式近海域水下监控潜航系统,包括如上述所述的自主式近海域水下监控潜航器;还包括地面5g 基站,与所述通信浮标连接;星链卫星,与所述通信浮标连接。
20.本实用新型的有益效果是:通过在潜航器前端安装摄像机,能自动对水下情况进行拍摄;透明壳体用于保护摄像机,使其能够正常稳定工作;另外,由于本潜航器使用通信浮标将摄像机拍摄的信息对外传输,无需辅助船只支持,且无需连接线缆进行操控,在海况恶劣的情况下作业也不会受到影响;减少作业难度,能覆盖大面积海域作业。
附图说明
21.图1为本实用新型一种自主式近海域水下监控潜航器的俯视图。
22.图2为本实用新型一种自主式近海域水下监控潜航器的侧视图。
23.图3为本实用新型一种自主式近海域水下监控潜航器的前视图。
24.图4为本实用新型一种自主式近海域水下监控潜航器的后视图。
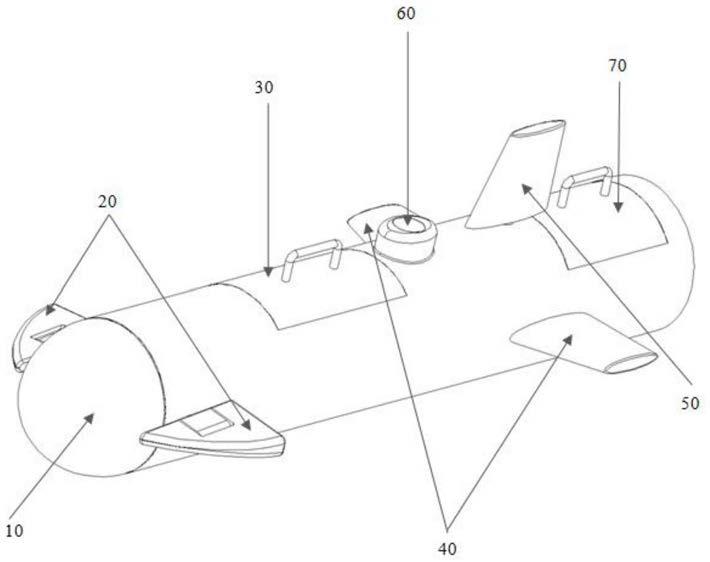
25.图5为本实用新型一种自主式近海域水下监控潜航器的整体示意图。
26.图6为本实用新型一种自主式近海域水下监控潜航器的结构示意图。
27.图7为本实用新型一种自主式近海域水下监控潜航器的剖视图。
28.图8为本实用新型一种自主式近海域水下监控潜航器的另一剖视图。
29.图9为本实用新型一种自主式近海域水下监控潜航系统的示意图。
30.附图标记:
31.10、透明壳体;11、摄像机;12、声呐阵列;20、方向舵;30、主设备舱;31、电机组;32、主控芯片;33、电池组;40、水平安定面;50垂直安定面;60、通信浮标;61、数据线缆;70、动力舱;80、前部浮力储备舱;81、前部进水阀;90、后部浮力储备舱;91、后部进水阀;100、进水口;110、推力泵;120、地面5g 基站;130、星链卫星。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
33.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.参见图1至图9,一种自主式近海域水下监控潜航器,包括艇首本体,还包括:方向舵20,与所述艇首本体通过轴连接,所述方向舵20并设置在所述艇首本体的前端两侧;摄像机11,安装在所述透明壳体10内;所述摄像机11底下设有安装板,所述安装板包括两侧的卡扣片和底部的定位片,所述安装板用于固定所述摄像机11;透明壳体10,与所述所述艇首本体可拆卸连接,所述透明壳体10安装在所述摄像机11的外部,呈半球形;所述艇首本体,还包括主设备舱30、动力舱70和安定面,所述安定面包括设置在所述艇首本体的两个水平安定面40和垂直安定面50。
36.在本实施例中,方向舵20由转向部、十字轴等部件组成,进而方向舵20可以上下前后转动,更加容易调整前进方向,提高指向性。更优的,摄像机11通过安装板进行固定,其中卡扣片内侧设置有卡孔,摄像机11两侧有与之对应的卡针,因此两者可以相互卡接;另外,定位片上设置有螺孔,用于与潜航器进行可拆卸连接,便于维护。透明壳体10设置在摄像机11外部,用于保护摄像机11。其中,艇首本体设置的主设备舱30,用于放置电机31、主控芯片32、电池组33等机电设备;动力舱70用于放置驱动安定面的电机和喷水式泵。水平安定面40和垂直安定面50用于调整潜航器水平和垂直方向的航行。考虑到水下航行性能、一定深度的耐压需求和浮力储备结构的设计,并结合切实可行的制造工艺,潜航器外形采用比较成熟的大长径比雪茄形。
37.优选的,还包括主控芯片组32、电机组31和电池组33;所述主控芯片组32设置在所述艇首本体内部,所述主控芯片组32与所述摄像机11连接;所述方向舵20、所述水平安定面40和所述垂直安定面50分别与对应的所述电机组31连接;所述电机组31分别与所述主控芯片组32连接;所述电池组33设置在所述艇首本体的内部。
38.在本实施例中,摄像机11拍摄得到的视频信息,发送至主控芯片32,主控芯片32再将视频信息通过通信浮标60对外发送;另外,主控芯片32还控制电机组31的运行,进而能调整方向舵20和安定面的转向。电池组33为整个潜航器的机电系统提供电能。
39.优选的,还包括通信浮标60,所述通信浮标,设置在所述艇首本体的上方;所述艇首本体上方设有收纳舱,所述通信浮60标于所述收纳舱可拆卸连接。
40.在本实施例中,收纳舱上设置有舱盖,当通信浮标60需要使用时舱盖打开即可弹出;需要说明的是,通讯浮标底下设置的气缸,通过装有压缩气体将通信浮标60弹出。
41.优选的,所述通信浮标60通过数据线缆61与所述艇首本体连接,所述数据线缆61与所述主控芯片32组连接。
42.在本实施例中,数据缆线的总长度满足潜航器达到最大下潜深度并留有余量。通信浮标60具备5g通信模块和星链通信模块;在5g基础设施有效覆盖的近海域使用5g信号实现通信,而在5g技术设施没能有效覆盖的近海域地区则使用星链信号实现通信。
43.优选的,还包括声呐阵列12,所述声呐阵列12设置在所述艇首本体的前端和两侧。
44.在本实施例中,前端的声呐阵列12可以设置在透明壳体10内。两侧的声呐阵列12为侧身声呐阵列12;本潜航器还应用以仿生学原理开发的传感器,例如以鱼类侧线原理开发用以感知振动源变化的压力传感器;提高潜航器在光线不足和自然背景噪音影响声呐的环境中导航和感知能力。
45.优选的,所述艇首本体还包括:前部浮力储备舱80,为环形结构,设置在所述艇首本体的前端;后部浮力储备舱90,为环形结构,设置在所述艇首本体的后端;进水口100;推力泵110,所述推力泵110采用喷水式泵,并配有可偏转的三维轴对称矢量结构喷口。
46.在本实施例中,进水口100用于喷水式泵喷水时使用;为提高潜航器水下航行的操纵性并避免使用桨式推进装置而被水中异物缠绕或桨叶击伤海洋生物,潜航器考虑采用喷水式泵推作为动力装置并配有可偏转的三维轴对称矢量结构喷口;方向舵20采用全动式结构以配合提高操纵性。具体的,为了改变潜航器自身的重力,需灌入海水,因此前部浮力储备舱80和后部浮力储备舱90底下设置有前部进水阀81和后部进水阀91。前部浮力储备舱80和后部浮力储备舱90均为环形结构,其中环形结构的外环部分用于填充海水,内环部分用于贯穿部件线缆等。环形结构设置为前后两段目的是使潜航器前部或后部上升或下沉时只需改变其中一端的海水容量即可,也可同时调节两段的海水容量,对调节潜航器的上升或下沉范围更加方便。
47.优选的,所述方向舵20,包括与所述艇首本体一侧设置的转向部,所述转向部内部设置有十字轴。
48.优选的,所述透明壳体10,采用高透明度石英玻璃、高透明度陶瓷玻璃或高透明度pc塑料制成。
49.在本实施例中,为保证摄像机11画面采集和水下工作环境的需求,潜航器艇首的透明壳体10需要保证高透明度和一定的耐压耐腐蚀性能,可选的材料包括高透明度石英玻璃、高透明度陶瓷玻璃或高透明度pc塑料等。
50.优选的,所述摄像机11,为球形摄像机11,采用ai摄像机11或。
51.另一方面,本实用新型还提供一种自主式近海域水下监控潜航系统,包括如上述任一项所述的自主式近海域水下监控潜航器;还包括地面5g 基站120,与所述通信浮标60连接;星链卫星130,与所述通信浮标60连接。
52.在本实施例中,通信浮标60将数据信息发送至地面5g 基站120或星链卫星130;潜航器由泊位入水下潜后开始释放通信浮标60,具体的通信模式根据内置信号强度检测结果而定;如果在5g通信基础设施覆盖范围内并且信号稳定则保持5g信号链并关闭星链通信,而如果超出5g覆盖区域则开启星链信号。潜航器之间由后台总控服务器运行的蜂群算法和上下行数据链构成蜂群网络,对潜航器蜂群各个子端的巡视范围、巡检路径、风险规避、剩余电量管理等作出最优解,实现对大面积作业区的高效监控覆盖。
53.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优
选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。