一种漂浮式风机tlp平台运营期监测方法
技术领域
1.本发明涉及漂浮式风机张力腿式(tlp)平台运营期监测的技术领域。
背景技术:
2.漂浮式风机一般位于远离海岸的深远海,现场风浪流等自然条件恶劣,风机运行极易发生不可预测的破坏,因此监测对深远海漂浮式风机具有十分重要的意义。通过监测可以发现平台和锚泊系统的工作状态,及早发现问题和隐患,补强加固,防患于未然,保证风机的安全运营。
3.漂浮式风电国内的研究刚刚起步,无标准规范可循、也无相关的设计计算经验,一方面需要通过运营期监测获得第一手数据可以验证并修正漂浮式平台的设计方法,为提高设计和科学研究水平提供资料;另一方面也需要通过长期的安全监测保证漂浮式风机全寿命周期安全运营,从而推动深远海漂浮式风电技术的发展。
4.为解决上述问题,针对漂浮式风机张力腿式平台,设计一套运营期监测方法,对保证深远海漂浮式风机的安全运营及提高相应的设计和科学研究水平具有重要意义。
技术实现要素:
5.本发明的目的在于提供一种漂浮式风机tlp平台运营期监测方法,能全面监测tlp平台在运营期各组件的位移、应力、腐蚀等状态。
6.实现上述目的的技术方案是:
7.一种漂浮式风机tlp平台运营期监测方法,漂浮式风机tlp平台包括:平台本体、设置在平台本体多个浮筒中心的各个连接器以及连接所述平台本体以及所述连接器的张力筋腱,监测方法包括:
8.步骤一,张力筋腱拉力监测:在张力筋腱和平台本体的连接处设置张力微调装置,将张力筋腱的张力转化为张力微调装置对平台本体的压力,根据压力转化为相应的筋腱应力值;同时,在张力筋腱与连接器的连接部位布置应变测量装置对张力筋的应变变化进行监测;
9.步骤二,张力筋腱倾角及方位角监测:在张力筋腱与连接器的连接处布置光纤陀螺仪,测量张力筋腱的方位角;在张力筋腱与平台本体连接处布置倾角仪,监测张力筋腱顶部的倾角;
10.步骤三,平台构件应力监测:在平台本体的斜杆、底杆和主立杆分别布置多个应变测量装置,测量平台本体构件的应变;
11.步骤四,平台位置、朝向及运动姿态监测:采用全球定位系统及船舶自动识别系统测量平台本体的位置,采用电子罗盘测量平台本体的朝向;采用mru运动参考单元监测平台本体六个自由度的加速度及位移参数;
12.步骤五,平台运行环境风浪流的监测:采用超声波风速传感器测量风速和风向,采用浮标式波浪仪测量波浪,采用声学多普勒流速剖面仪测量海流。
13.优选的,还包括:
14.步骤六,平台腐蚀监测:监测平台本体腐蚀监测点的牺牲阳极发射的电流大小以及保护电位电压大小,监测张力筋腱腐蚀监测点的牺牲阳极发射的电流大小以及保护电位电压大小;
15.步骤七,水下系泊系统海生物生长及腐蚀情况监测:潜水员或水下机器人携带游标卡尺及称重装置对张力筋腱的外观尺寸进行测量,对张力筋腱重量进行称重;
16.步骤八,数据传输:所有数据汇总到平台本体的塔筒内的微控制单元,并通过光纤传送到岸上监测中心。
17.优选的,步骤一中,将压力秤传感器组件安装在张力微调装置与平台本体之间,使张力微调装置对平台本体的压力作用在压力秤传感器上,利用传感器将位移信号转化为相应的筋腱应力值;张力筋腱与连接器的连接部位在沿张力筋腱环向0
°
和180
°
的位置分别布置应变测量装置。
18.优选的,步骤四中,全球定位系统、船舶自动识别系统和电子罗盘均布置在平台本体的过渡段顶部。
19.优选的,步骤五中,超声波风速传感器布置在平台本体的过渡段顶部,浮标式波浪仪采用锚链和浮球连接在平台本体的浮筒上;声学多普勒流速剖面仪布置在平台本体的浮筒,并位于浮标式波浪仪下方。
20.优选的,步骤六中,平台本体腐蚀监测点位于平台本体的浮筒顶部向下5m深度以及与浮筒顶部同一水平高度的左侧斜杆上;
21.张力筋腱腐蚀监测点位于连接器与平台本体连接处,以及张力筋腱与连接器连接处。
22.本发明的有益效果是:本发明通过有效的设计,有效实现对漂浮式风机tlp平台运营期的全方位监测,确保漂浮式风机全寿命周期安全运营,并且对科学研究水平具有重要意义。
附图说明
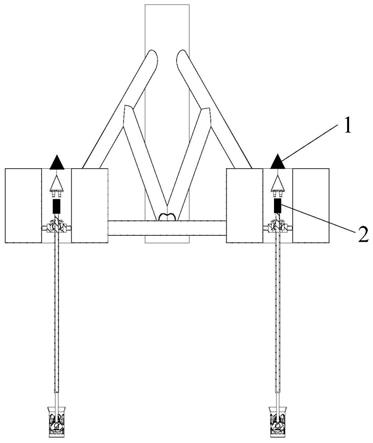
23.图1是本发明中tlp平台张力筋腱应变传感器及张力微调装置布置图;
24.图2是本发明中tlp平台张力筋腱陀螺罗盘及倾角仪布置图;
25.图3是本发明中tlp平台斜杆应变监测位置示意图;
26.图4是本发明中tlp平台底杆及主立杆应变监测位置示意图;
27.图5是本发明中tlp平台位置、朝向及运动监测位置示意图;
28.图6是本发明中tlp平台运行环境风浪流监测位置示意图;
29.图7是本发明中tlp平台腐蚀监测位置。
具体实施方式
30.下面将结合附图对本发明作进一步说明。
31.请参阅图1-7,漂浮式风机tlp平台包括:平台本体、设置在平台本体多个浮筒中心的各个连接器以及连接所述平台本体以及所述连接器的张力筋腱。本实施例中,连接器和浮筒均为4个。平台本体由斜杆、底杆、主立杆、浮筒、塔筒等部件构成,如图,为现有结构,不
再赘述。
32.本发明的漂浮式风机tlp平台运营期监测方法,包括下列步骤:
33.步骤一,张力筋腱拉力监测:如图1所示,在张力筋腱和平台本体的连接处设置张力微调装置,将张力筋腱的张力转化为张力微调装置对平台本体的压力,将压力秤传感器组件安装在张力微调装置与平台本体之间,使张力微调装置对平台本体的压力作用在压力秤传感器上,利用传感器将位移信号转化为相应的筋腱应力值;同时,在张力筋腱与连接器的连接部位布置应变测量装置对张力筋的应变变化进行监测。张力筋腱与连接器的连接部位在沿张力筋腱环向0
°
和180
°
的位置分别布置应变测量装置,共布置8个应变测点,采用光纤布拉格光栅应变传感器,测量精度1με,采样频率取为5hz。
34.步骤二,张力筋腱倾角及方位角监测:在张力筋腱与连接器的连接处布置光纤陀螺仪,测量张力筋腱的方位角,测量精度应达到0.5
°
,测量范围
±
90
°
,采样频率为5hz。在张力筋腱与平台本体连接处布置倾角仪,监测张力筋腱顶部的倾角,测量精度应达到1
°
,测量范围
±
45
°
,采样频率可为5hz。如图2所示。方案为四腿tlp平台形式,图中仅给出其中两个腿部示意图,其余两条腿相同布置,共布置4个光纤陀螺仪和4个倾角仪。
35.步骤三,平台构件应力监测:在平台本体的斜杆、底杆和主立杆分别布置多个应变测量装置,测量平台本体构件的应变。如图3所示,图中仅给出了四个斜面中的一个面上的应变监测位置,其余三个面同样布置,每个测点监测钢管环向0
°
和180
°
的纵向应变,共计16个测点,32枚应变传感器。平台底杆及主立杆上的应变监测位置如图4所示,图中仅给出了四个立面中的一个面上的应变监测位置,其余三个面同样布置,底杆每个测点监测钢管环向0
°
和180
°
的纵向应变,共计16个测点,32枚应变传感器。主立杆测量环向0
°
,90
°
,180
°
及270
°
的纵向应变,上下分为3层,共计12枚应变传感器。此外在塔筒和过渡段交接界面,及图中主立管的顶部截面,测量环向0
°
,90
°
,180
°
及270
°
的纵向和环向应变,共计4个测点,8枚应变传感器。所有应变传感器采用光纤布拉格光栅应变传感器,测量精度1με,采样频率取为5hz。
36.步骤四,平台位置、朝向及运动姿态监测:采用全球定位系统及船舶自动识别系统测量平台本体的位置,测量精度位置为
±
1m,采样频率0.1hz。采用电子罗盘测量平台本体的朝向,测量精度位置为
±1°
,采样频率0.1hz。如图5,全球定位系统、船舶自动识别系统和电子罗盘均布置在平台本体的过渡段顶部。平台过渡段位置的运动姿态,采用mru(motion reference unit)运动参考单元监测平台横荡、纵荡、垂荡、横摇、纵摇和艏摇的六个自由度的加速度及位移参数,监测频率为5hz。
37.步骤五,平台运行环境风浪流的监测:采用超声波风速传感器测量风速和风向,采用浮标式波浪仪测量波浪,采用声学多普勒流速剖面仪测量海流。如图6所示,超声波风速传感器布置在平台本体的过渡段顶部,浮标式波浪仪采用锚链和浮球连接在平台本体的浮筒上,数据采样频率为0.1hz。采样数据直接通过短距离信号发射到平台上的接收机上。海流采用声学多普勒流速剖面仪进行测量,测点位置位于上述两个浮筒最下层波浪仪截面向下1m和2m的位置,两个浮筒上每个浮筒各布置两个,共四个,如图6所示,采样频率为0.1hz。
38.步骤六,平台腐蚀监测:监测平台本体腐蚀监测点的牺牲阳极发射的电流大小以及保护电位电压大小,监测频率为0.1hz。监测张力筋腱腐蚀监测点的牺牲阳极发射的电流大小以及保护电位电压大小,监测频率为0.1hz。图中只画出了tlp平台一个浮筒上的腐蚀
测点,其余三个浮筒上方同样设置,平台本体上共12个测点,张力筋腱上共8个测点,每个测点监测保护电位及牺牲阳极的发射电流。平台本体腐蚀监测点位于平台本体的浮筒顶部向下5m深度以及与浮筒顶部同一水平高度的左侧斜杆上。如图7所示。张力筋腱腐蚀监测点位于连接器与平台本体连接处,以及张力筋腱与连接器连接处。
39.步骤七,水下系泊系统海生物生长及腐蚀情况监测:潜水员或水下机器人携带游标卡尺及称重装置对张力筋腱的外观尺寸进行测量,对张力筋腱重量进行称重。初次监测定于运营开始1个月后,随后每隔3个月进行一次水下监测。
40.步骤八,数据传输:所有数据汇总到平台本体的塔筒内的微控制单元,并通过光纤传送到岸上监测中心。
41.图1-7中,各标号分别表示:1、张力微调装置测点;2、筋腱张力应力测点;3、倾角仪测点;4、陀螺罗盘测点;5、应变监测测点;6、平台位置、朝向及运动姿态测点;7、超声波风速传感器测点;8、声学多普勒流速剖面仪测点;9、浮标式波浪仪测点;10、平台钢管结构腐蚀测点;11、筋腱连接器与筋腱连接点腐蚀测点;12、筋腱连接器与平台接触点位置腐蚀测点。
42.以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本发明的范畴,应由各权利要求所限定。