1.本实用新型属于水下救援设备技术领域,尤其涉及一种用于水下救援的机器人。
背景技术:
2.在日常生活中,随着全民运动的普及,游泳运动被大众广泛参与,安全问题也日益突出。数量巨大的泳池存在部分巡逻力度不大、安全措施不到位以及缺乏专业水上应急救援装置,尤其夏天,导致溺水死亡事故频繁发生。为了避免悲剧的发生,部分地区已实现了水下救援机器人的使用。
3.现有市面上的水下救援的机器人,如中国专利库公开的一种水上急救机器人及工作方法(申请号:cn 202010850913.8;公开号:cn 112078759a),它包括机器人本体和与机器人本体控制器连通的控制系统以及用户手环;所述机器人本体包括:驱动舱,对称安装在驱动舱两侧的平衡翼,以及设置在驱动舱中的动力装置,固定安装在驱动舱四周的浮力检测控制装置,以及固定安装在驱动舱顶部多个方向的救生抛投装置。
4.上述急救机器人需给每个游泳的人佩戴用户手环,其所需投入成本高;当有险情时,需用户自行按下急救按钮,但当用户遇到险情,在惊慌状态下并不一定会想到按压急救按钮这一环节,其风险性较高;只能告知救援人员有人溺水,但无法确定溺水人员的具体位置,从而无法使水下救援机器人快速准确的对溺水人员实施救援,救援效果较差。
技术实现要素:
5.本实用新型提供了一种用于水下救援的机器人,可以有效解决上述问题。
6.本实用新型是这样实现的:
7.一种用于水下救援的机器人,包括:机架、设置在所述机架上的动力装置、设置在所述机架内部的密封舱、设置在所述密封舱上的视觉窗口、以及设置在所述机架上的救援机构;所述密封舱内设有视觉传感器、无线通讯装置和控制机构,且所述视觉传感器设置于所述视觉窗口处;所述救援机构包括设置在所述机架上的储气罐、设置在所述机架顶部的承托底座、以及设置在所述承托底座上且与所述储气罐通过导管连通的气囊,所述导管上设有导通开关,所述气囊进气口处设有单向阀。
8.作为进一步改进的,所述动力装置包括设置在所述机架底部的水平移动机构以及贯穿在所述机架上的竖直移动机构。
9.作为进一步改进的,所述控制机构用于根据所述控制信息控制所述水平移动机构驱动所述机器人在水面上快速移动到溺水人员预定范围。
10.作为进一步改进的,所述预定范围是5m
‑
10m。
11.作为进一步改进的,所述水平移动机构有四组,且等间距设置在所述机架底部;相邻设置的两所述水平移动机构的行进方向垂直。
12.作为进一步改进的,该用于水下救援的机器人还包括设置在所述承托底座上的若干组束缚机构,所述束缚机构包括相对设置在所述承托底座两端的两条束缚带,两条所述
束缚带通过吸附件连接。
13.作为进一步改进的,该用于水下救援的机器人还包括设置在所述密封舱内的陀螺仪、设置在所述密封舱内的位置指示灯、以及设置在所述机架底部的压力传感器。
14.作为进一步改进的,该用于水下救援的机器人还包括设置在所述导管上的计时器、设置在所述气囊上的气体检测装置、以及设置在所述承托底座上的夹持器。
15.作为进一步改进的,所述气囊外沿设有环状凸起,所述气囊上设有至少一个通槽以及至少一个把手。
16.作为进一步改进的,所述视觉传感器包括设置在所述密封舱内的两组检测摄像头和热成像传感器。
17.本实用新型的有益效果是:本实用新型在机器人的密封舱内的设置视觉传感器、无线通讯装置和控制机构;其中,控制机构根据无线通讯装置所接收外部的控制信息来控制控制动力装置,使机器人移动到溺水人员的预定范围内,再控制视觉传感器准确判断机器人与溺水人员的具体实时位置,进而继续控制动力装置,使机器人向溺水人员底部运动;与此同时,控制机构控制救援机构救援,把溺水人员托出水面,帮助溺水人员脱离险情;该救援机器人所需成本低;可及时发现溺水人员并实施救援,避免溺水人员错过救援机会的发生;通过该机器人可快速准确的对溺水人员进行施救,救援效果好。
附图说明
18.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
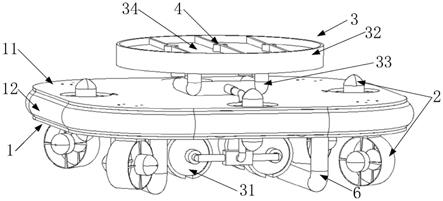
19.图1是本实用新型实施例提供的用于水下救援的机器人的结构示意图;
20.图2是本实用新型实施例提供的用于水下救援的机器人的正视图;
21.图3是本实用新型实施例提供的用于水下救援的机器人的侧视图;
22.图4是本实用新型实施例提供的用于水下救援的机器人的俯视图;
23.图5是本实用新型实施例提供的用于水下救援的机器人的仰视图;
24.图6是本实用新型实施例提供的用于水下救援的机器人的气囊展开的结构示意图;
25.图7是本实用新型实施例提供的用于水下救援的机器人的控制原理结构框图。
26.附图标记:
[0027]1‑
机架;11
‑
密封舱;12
‑
视觉窗口;2
‑
动力装置;3
‑
救援机构;31
‑
储气罐;32
‑
承托底座;33
‑
导管;34
‑
气囊;35
‑
固定装置;21
‑
水平移动机构;22
‑
竖直移动机构;4
‑
束缚机构;41
‑
束缚带;42
‑
吸附件;5
‑
压力传感器;341
‑
环状凸起;342
‑
通槽;343
‑
把手;6
‑
护栏。
具体实施方式
[0028]
为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用
新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
[0029]
在本实用新型的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0030]
参照图1
‑
7所示,一种用于水下救援的机器人,包括:机架1、设置在所述机架1上的动力装置2、设置在所述机架内部的密封舱11、设置在所述密封舱11上的视觉窗口12、以及设置在所述机架1上的救援机构3;所述密封舱11内设有视觉传感器、无线通讯装置和控制机构,且所述视觉传感器设置于所述视觉窗口12处;所述救援机构3包括设置在所述机架1上的储气罐31、设置在所述机架1顶部的承托底座32、以及设置在所述承托底座32上且与所述储气罐31通过导管33连通的气囊34,所述导管33上设有导通开关,所述气囊34进气口处设有单向阀。
[0031]
其中,所述无线通讯装置用于接收外部的控制信息,且所述控制机构用于根据所述控制信息控制所述机器人移动到溺水人员预定范围;且所述控制机构进一步用于当所述机器人移动到溺水人员预定范围内时,控制所述视觉传感器工作来获得所述溺水人员的具体实时位置,且所述控制机构进一步用于根据所述具体实时位置控制所述机器人移动到溺水人员下部并通过所述救援机构3进行救援。
[0032]
具体实施时,将设置在所述机架1上的密封舱11上设置可供视觉传感器观察所述机架1的外围环境的视觉窗口12,并将所述无线通讯装置和控制机构设置在密封舱11内。当出现溺水人员时,所述无线通讯装置接收外部监测系统所发送的控制信息,所述控制机构根据所述控制信息控制机器人上浮至水面并移动到溺水人员的预定范围内。其中,所述机器人上浮到水面移动,减少了水对机器人的阻力,减少机器人的功耗,并可快速到达预定范围,提高救援效率,从而提高溺水人员的安全性。当所述机器人进入预定范围后,再控制视觉传感器准确判断机器人与溺水人员的具体实时位置,进而继续控制动力装置2,使机器人向溺水人员底部下潜和前进;并在下潜和前进的过程中,通过所述控制机构控制所述救援机构3的气囊34充气,并在所述气囊34充气满足条件后释放气囊34,从而把溺水人员托出水面,帮助溺水人员脱离险情,完成救援。其中,所述视觉窗口12设置为环状结构,视野更开阔,视觉传感器能检测到更大的范围;且在密封舱11内还可设置旋转机构,所述视觉传感器设置在所述旋转机构上,便于增大所述视觉传感器检测机架1外的周围环境,提高所述机器人的灵活性,提高安全性能。另外,若所述机器人本来就在溺水人员的预定范围内时,直接通过所述控制机构控制所述机器人移动至所述溺水人员下方。
[0033]
在本实施例中,所述储气罐31通过固定装置35固定在所述机架1底部,所述储气罐31内压缩有气体,便于对所述气囊34充气;所述储气罐31设置于所述机架1底部,且其出气口与所述导管33一端连接,所述导管33另一端贯穿所述机架1,并与设置在所述机架1顶部的所述承托底座32连通,并与所述气囊34对接。在所述导管33上设有导通开关,在所述气囊
34进气口处设有单向阀;当需要对所述气囊34充气时,通过所述控制机构控制所述导通开关打开,进而对所述气囊34进行充气;当气囊34充满气体且脱离所述承托底座32时,所述单向阀的设置避免气体溢出。在该实施例中,所述机架1底部还设有护栏6,所述护栏6有两组,分别设置在所述储气罐31两侧,可用于保护储气罐31,且当需要对所述机器人进行检修维护时,所述护栏6还可以用于支撑作用,将所述机器人支撑在地面上,便于所述机器人的放置。
[0034]
本实用新型在机器人的密封舱11内的设置视觉传感器、无线通讯装置和控制机构;其中,控制机构根据无线通讯装置所接收外部的控制信息来控制控制动力装置2,使机器人移动到溺水人员的预定范围内,再控制视觉传感器准确判断机器人与溺水人员的具体实时位置,进而继续控制动力装置2,使机器人向溺水人员底部运动;与此同时,控制机构控制救援机构3救援,把溺水人员托出水面,帮助溺水人员脱离险情;该救援机器人所需成本低;可及时发现溺水人员并实施救援,避免溺水人员错过救援机会的发生;通过该机器人可快速准确的对溺水人员进行施救,救援效果好。
[0035]
进一步地,所述动力装置2包括设置在所述机架1底部的水平移动机构21以及贯穿在所述机架1上的竖直移动机构22。
[0036]
进一步地,所述控制机构用于根据所述控制信息控制所述水平移动机构21驱动所述机器人在水面上快速移动到溺水人员预定范围。
[0037]
进一步地,所述水平移动机构21有四组,且等间距设置在所述机架1底部;相邻设置的两所述水平移动机构21的行进方向垂直。
[0038]
进一步地,所述预定范围是5m
‑
10m。
[0039]
具体实施时,所述动力装置2包括设置在所述机架1底部四端的四个水平移动机构21以及贯穿在所述机架1上的四组竖直移动机构22;其中,四组所述竖直移动机构22以该机器人的重心为中心,呈十字分布在所述机架1上,用于控制该机器人的沉浮,能使机器人更好的稳定在水平状态;四组所述水平移动机构21以该机器人的重心为中心,呈x型分布在所述机架1上,且相邻设置的两所述水平移动机构21的行进方向垂直,用于控制该机器人的前进以及调整方向;即四组所述竖直移动机构22与四组所述水平移动机构21交叉设置。当需要调整方向时,通过所述控制机构控制四组所述水平移动机构21的电机的不同转速即可完成方向的调整。所述控制机构用于根据所述控制信息控制所述水平移动机构21驱动所述机器人在水面上快速移动到溺水人员的预定范围内;其中,所述控制机构控制所述机器人上浮到水面移动,其减少了水对机器人的阻力,减少机器人的功耗,并可快速到达预定范围,提高救援效率,提高溺水人员的安全性。
[0040]
进一步地,该用于水下救援的机器人还包括设置在所述承托底座32上的若干组束缚机构4,所述束缚机构4包括相对设置在所述承托底座32两端的两条束缚带41,两条所述束缚带41通过吸附件42连接。在本实施例中,未充气时,所述气囊34固定于所述承托底座32上,在该实施例中,所述承托底座32为圆形无盖容器,尺寸为直径30cm高10cm。所述束缚机构4有若干组,每组束缚机构4均由两条所述束缚带41和吸附件42组成;其中,所述吸附组件包括两个圆形磁铁,通过两所述圆形磁铁吸附而夹紧两所述束缚带41,起到束缚未展开的所述气囊34的作用。充气时,所述气囊34膨胀到张力大于所述圆形磁铁之间的吸附力后,所述圆形磁铁松开,两所述束缚带41分离,所述气囊34放出;同时,所述气囊34底部有微型夹
持器将气囊34夹持在所述承托底座32上,当所述气囊34充气完成后,所述控制机构控制夹持器松开,所述气囊34与机器人分离上浮,无需带动所述机器人一起上浮,救援效果好。
[0041]
进一步地,该用于水下救援的机器人还包括设置在所述密封舱11内的陀螺仪、设置在所述密封舱11内的位置指示灯、以及设置在所述机架1底部的压力传感器5。在本实施例中,所述陀螺仪用于测得所述机器人在水下的姿态信号,并将所述姿态信号传递给所述控制机构,所述控制机构根据所述姿态信号判断机器人的姿态,并通过控制所述动力装置2,使得机器人在水下保持平衡;当所述机器人潜至溺水人员正下端时,通过所述控制机构根据压力传感器5用于判断机器人在水下深度,根据所述热成像传感器判断机器人与溺水人员之间的距离,便于所述控制机构控制所述机器人与溺水人员保持合适的距离;其中,所述压力传感器5安装于所述机架1底部中心位置的凹槽处,以减少水流的影响。所述机架1在四个角落布置四个位置指示灯,便于所述检测摄像头判断机器人与溺水人员的相对位置。
[0042]
进一步地,所述气囊34外沿设有环状凸起341,所述气囊34上设有至少一个通槽342以及至少一个把手343。在本实施例中,在所述气囊34外沿设置环状凸起341,充满气体时,所述气囊34形成碟状结构,其四周突起,中间内凹;所述气囊34展开后直径为1.5m,便于将整个溺水人员托起。当将溺水人员托起或托起的过程中,该碟状的气囊34结构可以防止溺水人员滑出气垫,提高安全性。在所述气囊34上设置至少一个把手343,其便于托起溺水人员的过程中,方便抓握,有利于缓解溺水人员的紧张情绪;在该实施例中,所述把手343有四个,呈环状等间距设置在气囊34上端。在所述气囊34上设置至少一个通槽342,该实施例中,所述通槽342具有多个,且均匀设置在所述气囊34上,且通槽342为直径10cm,在气囊34上浮的过程中起到排水的作用,可以减少所述气囊34在上浮过程中水的阻力,防止气囊34发生偏移,减少所述气囊34上浮过程中对溺水人员的撞击力,救援效果好。
[0043]
进一步地,所述视觉传感器包括设置在所述密封舱11内的两组检测摄像头和热成像传感器。在本实施例中,所述视觉传感器由两组检测摄像头和热成像传感器组成;两个所述检测摄像头,形成双目,判断所述机器人与溺水人员之间的距离更加精准。而结合所述视觉传感器的设置可进一步提高判断所述机器人与溺水人员之间的距离的准确性。两组所述检测摄像头以及热成像传感器均安装于机器人内部的密封舱11内,能够有效的保护摄像头;其中视觉窗口12的设置便于所述检测摄像头探测机架1外的周围环境。
[0044]
在本实施例中,当所述机器人在不工作状态时,所述机器人可在水中充电站进行无线充电,随时待命,在接到报警信息后快速移动至溺水人员下方,打开与所述储气罐31连通的导管33上的所述导通开关,所述气囊34充气胀大,充满气后脱开所述夹持器,最后将溺水人员托起。
[0045]
进一步地,该用于水下救援的机器人还包括设置在所述导管33上的计时器、设置在所述气囊34上的气体检测装置、以及设置在所述承托底座32上的夹持器;所述计时器用于计数所述储气罐31对所述气囊34的充气时间,所述气体检测装置用于检测气囊34充气量的多少,所述夹持器用于夹持所述气囊34,当需要释放所述气囊34时,通过所述控制机构控制所述夹持器打开,实现所述气囊34的释放。
[0046]
一种用于水下救援的机器人的控制方法,包括如下步骤:
[0047]
s10:通过设置在地面上的监测系统监控整个水域内人员的活动情况,根据整个水域内人员的动作判断是否溺水;若是,监测系统生成控制信息以及溺水人员的初始位置信
息,并将所述控制信息和初始位置信息发送给无线通讯装置;
[0048]
s20:控制机构根据所述控制信息和初始位置信息控制水平移动机构21和竖直移动机构22工作,使机器人向溺水人员靠近;
[0049]
s30:机器人靠近溺水人员的过程中,通过视觉传感器实时监测溺水人员的实时位置信息;控制机构根据实时位置信息控制机器人向溺水人员下方靠近,同时控制储气罐31对气囊34充气并计时;
[0050]
s40:机器人潜至溺水人员下方,当储气罐31对气囊34充气时间到达设定的时间,或气囊34充气量到达设定阈值时,控制机构控制承托底座32释放气囊34,气囊34上浮,并将溺水人员托起,完成救援工作。
[0051]
进一步地,所述步骤s10还包括:监测系统将初始位置信息发送给控制云台和救援人员;控制云台控制警报装置发出警报,同时控制聚光灯照射在溺水人员所在区域。
[0052]
进一步地,所述步骤s30还包括:当视觉传感器与溺水人员的距离小于设定的位置阈值时,控制机构控制导通开关打开,气囊34开始充气。
[0053]
进一步地,所述步骤s30还包括:通过视觉传感器实时监测溺水人员距离水面的第一深度h1;通过压力传感器5测出机器人在水下的第二深度h2,h2>h1。较佳的,所述第二深度h2与第一深度h1之差大于该机器人的以及气囊34即将释放时的总高度。
[0054]
工作原理:当出现溺水人员时,通过设置在地面上的监测系统将监测到的溺水人员的初始位置信息发送给工作人员,其中,监测系统通过智能摄像头识别人的动作来区分是否溺水,通过图像反馈溺水人员初始位置信息;工作人员将初始位置信息以及控制信息发送给位于水中的所述机器人的无线通讯装置,所述控制机构根据所述控制信息控制所述机器人上浮到水面并沿着初始位置信息的大致方向移动,进入到溺水人员的预定范围内;其中,所述机器人上浮到水面移动,减少了水对机器人的阻力,减少机器人的功耗,并可快速到达预定范围,提高救援效率,提高溺水人员的安全性。救援的机器人进入预定范围后,通过所述控制机构控制所述密封舱11内的两组所述检测摄像头以及热成像传感器工作,实时监测溺水人员的实时位置信息;并通过所述控制机构控制所述机器人开始下沉;同时,根据设置在所述机架1底部的所述压力传感器5实时判断机器人在水下的深度信息;所述控制机构根据实时位置信息以及机器人在水下的深度信息控制所述机器人下潜至溺水人员的正下方位置;同时,当所述机器人由预定范围向溺水人员正下方位置下潜的过程中,所述控制机构控制所述导通开关打开,所述储气罐31对所述气囊34开始充气并通过控制所述计时器开始计时,减少充气等待时间,进一步提高救援效率。所述机器人移动至溺水人员下方后,若所述储气罐31对气囊34充气时间到达设定的时间,或气囊34充气量到达设定阈值时,所述控制机构控制设置在所述承托底座32上的夹持器松开所述气囊34,所述气囊34上浮,并将溺水人员托起,完成救援工作。在该实施例中,所述机器人在行进的过程中,均通过所述视觉传感器来判断前方是否有障碍物,当具有障碍物时,通过所述控制机构控制动力装置2,使所述机器人通过转向或/和升降来避开障碍物。
[0055]
以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。