1.本发明涉及一种拖曳绞车系统,用于在拖曳操作期间,特别是在护航操作期间,控制拖缆在漂浮物体与拖船之间的拉入(也称为回收)和放出(也称为放缆)。这种拖曳绞车系统也可以称为放缆和回收绞车系统。进一步,本发明涉及一种通过拖船拖曳漂浮物体的方法。具体地说,本发明涉及一种协助船舶通过水道的护航方法。
背景技术:
2.拖曳操作是一种典型的操作,它有它自己的动态行为。与其他海上操作(如系泊和锚泊)相比,拖曳操作的动态行为有很大不同。在拖曳操作期间,相对长的拖缆的高运行速度近在咫尺。放缆和回收拖缆时,拖缆正在改变方向运行。此外,当拖缆松弛时,拖缆可能会受到冲击负载。
3.拖船的板上的拖曳绞车系统必须应对这种动态行为。
4.执行拖曳操作的拖曳绞车系统可能与系泊绞车系统具有结构相似性,但是拖曳绞车系统通常必须在更恶劣的条件下运行。拖曳绞车系统的卷筒必须以高转速运行,并且要经历快速的旋转方向变化,以拉入或放出拖缆。总的来说,看起来系泊绞车系统不太适合进行拖曳操作。
5.ep2.385.011b1公开满足进行系泊操作,但不满足进行拖曳操作的系泊绞车的示例。当船只停泊在港口的码头或埠头旁边时,锚定船只的系泊绳索必须适当张紧,以便将船只保持在适当的位置。系泊绳索应保持正确的张力以防止由于船只相对于码头或埠头移动的趋势而使系泊绳索受到更大的力的原因而可能出现的危险情况。相对运动是由潮汐变化引起的水面高度变化以及货物装载和/或卸载造成的船只移位变化引起的。船只可能会被波浪或风颠簸或摇摆,从而导致系泊绳索的张力波动。绳索张力太大可能会导致绳索断裂。
6.所公开的系泊绞车具有用于控制系泊绳索张力的计算机程序。绳索的张力是在其他测量变量的基础上测量或计算的。可以测量电机的速度、电机的扭矩、卷筒的扭矩或绳索的张力。
7.所公开的系泊绞车包括由交流电机驱动的卷筒,其中卷筒被提供有制动器以保持卷筒。频率转换单元被布置为向交流电机供应电力。控制单元被布置成基于系泊绳索张力的指示器来控制频率转换单元。控制单元被布置成根据ac电机的定子电流来计算扭矩估计值。该扭矩估计值用作系泊绳索张力的指标。因此,通过将扭矩估计值保持在允许极限内,系泊绳索张力被保持在允许极限内。
8.控制单元被布置成设定参考值。参考值将ac电机的转速确定为预定值。首先,松脱保持卷筒的制动器,然后在预定的时间间隔内沿一方向驱动ac电机以限定电机扭矩的第一值。在预定的时间间隔内以相反的方向驱动ac电机以限定电机扭矩的第二值,以使用扭矩的第一值和第二值计算扭矩估计值。
9.这种已知系泊绞车的问题是,这种绞车不适合用于拖曳操作。如上所述,拖曳操作
中拖缆的动态特性与系泊操作中的动态特性显著不同,停泊操作位于港口的码头或埠头旁边。典型地,在系泊操作中,缆绳速度可增加至20米/分钟,而在拖曳操作中,当缆绳力为110吨时,放缆速度可达到80米/分钟,当缆绳力为30吨时,回收速度可达40米/分钟。在沿埠头的系泊操作中待补偿的潮汐波动相对慢,与在起伏较大的开放水域中进行的拖曳操作相比,潮汐波动幅度适中。此外,一般情况下,在拖曳操作中使用较长的拖缆,由于拖缆松弛,拖缆可能受到冲击负载。在拖曳操作中,当拖缆受到张力时,张力可能会更加突然发生。由于这种系泊绞车不适合在这些重环境中使用,因此需要一种能够进行拖曳操作的拖曳绞车系统。
10.ep2.830.985公开一种为绞车提供动力的系统,该绞车被设计成在更恶劣的条件下操作。为了在更恶劣的条件下运行,公开一种混合解决方案。公开一种改进的齿轮箱以改善绞车系统在操作期间的动态特性。齿轮箱被连接到液压驱动器和电力驱动器。齿轮箱具有与绞车卷筒接合的输出轴。卷筒的一侧沿着卷筒侧的周边被提供有切割齿。齿径向伸出,并平行于卷筒的旋转轴对齐。该齿与刚性固定在齿轮箱的输出轴端处的齿轮的齿啮合在一起。在齿轮箱的相对侧,中央输入可旋转轴由液压电机驱动。中央输入轴被连接到齿轮箱的太阳轮。三个行星轮被提供为围绕太阳轮,并在齿轮箱输出轴端处连接到齿轮。围绕行星轮布置有内部可旋转环和外部可旋转环。外环与第一和第二电机的轴上的齿轮接合。
11.液压电机被提供为仅在过载情况下运行。液压电机是一种安全措施,当金属丝的张力接近预定的设定值时开启。液压电机一直处于连接状态,但只有在缆绳负载过高时才开始工作。
12.然而,行星齿轮箱在机械意义上增加复杂性,这是不希望的。当该绞车承受在拖曳操作期间可能发生的高转速时,齿轮箱可能出现问题。液压电机作为安全措施是不利的,这是因为它增加绞车系统的复杂性。用于控制电机和液压电机的混合控制是必要的。此外,建议在液压系统中包括冷却回路作为简单且经济的解决方案,但这也不令人满意,这是因为它甚至进一步增加绞车系统的复杂性。
13.ep2.363.371公开一种具有拖曳绞车的船舶,该绞车被设计成执行拖曳操作。绞车具有框架和缆索筒,缆索筒具有容纳在所述框架中的筒轴。液压驱动器被提供来驱动所述轴,其包括驱动电机和联接器。联接器被布置在驱动电机与筒轴之间。联接器是液压联接器,它被控制以减少输入轴与输出轴之间的扭矩传递。确定施加在缆索筒上的力的负载测量传感器被连接到控制单元,以控制由联接器传输的动力/扭矩。液压联接器对于保持待拖曳的船舶与拖曳船舶之间的拉紧连接是必要的,另一方面防止绞车结构过载,因为这种过载可能完全破坏驱动绞车电机。
14.该绞车的问题是,联接器可能防止绞车过载,但解耦意味着至少在一段时间内,正在运行的拖缆可能失控。所公开的绞车结构的另一个缺点是其结构相当复杂。液压联接器包括许多部件。许多零件容易磨损,并有自己的失效因素。大量的部件降低绞车系统的可靠性。进一步地,绞车系统的占地面积相对大,这在通常具有狭窄内置空间的拖船的板上是不希望的。
15.wo2016/204726也公开一种用于护航操作的绞车系统。在护航操作中,护航拖船系在大型船只或油轮的船尾。在紧急情况下,如果油轮船只失去动力或方向舵故障,护航拖船将被命令前往油轮的左舷或右舷,并被指示进入间接模式或动力间接模式。所公开的绞车
系统具有大扭矩旋转绞车,也称为自动定位绞车,其安装到护航拖船的甲板。这种旋转布置可以减少护航操作期间作用在绞车上的侧向力。因此,这种自动定位绞车被配置为在护航操作期间减轻动态影响。
16.尽管所公开的这种可旋转绞车可以有助于在拖曳操作中减轻动态行为的影响,但是仍然希望提供另一种改进的拖曳绞车系统,其具有应对拖曳操作期间的动态行为的性能。
技术实现要素:
17.本发明的总体目标是至少部分消除上述缺点和/或提供可用的替代方案。更具体地,本发明的目的是提供一种拖曳绞车系统,其符合与拖曳操作的动态行为相关的机械要求,其中高扭矩和冲击负载与卷筒的高运行速度和旋转反转相结合。提出一种具有能够在拖曳操作期间的恶劣条件下工作的坚固结构的拖曳绞车系统是一个挑战。
18.根据本发明,该目的通过根据权利要求1的拖曳绞车系统来实现。
19.拖曳绞车系统被配置成在拖曳操作期间,特别是护航操作期间,控制船舶与拖船之间的拖缆。拖曳绞车系统被配置为控制拖缆的拉入(也称为回收)和放出(也称为放缆)。拖曳绞车系统也可以称为放缆和回收绞车系统。
20.拖曳绞车系统包括用于支撑拖曳绞车系统的部件的框架。
21.拖曳绞车系统包括用于卷绕和展开拖缆的卷筒。卷筒由框架可旋转地支撑。卷筒具有筒,该筒在第一卷筒凸缘与第二卷筒凸缘之间形成用于包围拖缆的卷绕空间。
22.拖曳绞车系统包括用于驱动卷筒以拉入拖缆的驱动器。驱动器通过齿轮传动装置连接到卷筒上。该齿轮传动装置是单级齿轮传动装置,用于利用单级减速将电机的转速降低到筒的较低转速。单级齿轮传动装置包括安装到卷筒的齿轮。驱动器直接与齿轮接合。优选地,单级齿轮传动装置具有至少15∶1的传动比,更优选至少20∶1的传动比。因此,齿轮传动装置被配置为利用单级减速将驱动器连接到卷筒。
23.在拖曳操作中,单级齿轮传动装置的优势在于,单级齿轮传动装置高效率地将驱动力从驱动器传递到卷筒,从而预期到由拖缆产生的高扭矩。单级齿轮传动装置在拖曳操作中更为有利,在拖曳操作中,需要执行卷筒的旋转反转,以从回收拖缆变为放缆拖缆,反之亦然。单级齿轮传动装置有利于抵消在这些反转过期间发生的冲击负载。此外,单级齿轮传动装置相对低的质量惯性允许拖曳绞车系统的卷筒高速运行。与多级齿轮箱相比,根据本发明的单级齿轮传动装置意味着拖曳绞车系统的结构的显著简化,这有助于拖船的板上的拖曳绞车系统的紧凑性和小占地面积。齿轮传动装置的这种构造在拖曳绞车系统的定期维修中可能有进一步的益处。拆卸和更换磨损部件时,操作影响较小。
24.拖曳绞车系统进一步包括制动器,该制动器可操作地连接到卷筒,用于保持或放出拖缆。制动器包括至少一个制动盘。
25.拖曳绞车系统包括用于控制驱动器和制动器的控制单元。控制单元可操作地与驱动器连接以为驱动器提供动力来加速卷筒以拉入拖缆。控制单元也可操作地与制动器连接以与卷筒接合,从而将卷筒保持在静止位置,或者在展开拖缆时制动卷筒以控制筒的转速。
26.驱动器和制动器由控制单元基于输入信号控制,该输入信号指示由拖缆施加在卷筒上的扭矩。
27.根据本发明的拖曳绞车系统提供的改进在于驱动器包括多个电机,并且在于制动器进一步包括多个制动卡钳。每个制动卡钳提供有一对制动垫,用于与至少一个制动盘接合。控制单元被编程为分别控制每个单独的电机和制动卡钳。
28.控制用于保持或制动卷筒的制动卡钳有利地是在拖曳操作期间控制拖缆张力的可靠和便利的方式。在拖曳操作中,拖缆张力可能因拖船的驱动力而增加。突然的变化,例如由于起伏运动,可能导致冲击负载,这可以通过允许卷筒在制动卡钳中滑动被有益地减轻。
29.包括多个电机和制动卡钳的拖曳绞车系统的配置进一步有利于基本设计可以用于覆盖广泛的应用。当例如需要20公吨的保持力时,基本设计的一定数量的电机和制动卡钳可以适应特定的情况,或者在其他情况下,当需要150公吨的保持力时,该数量可以增加。因此,基本设计可用于海洋拖船的大型拖曳绞车系统的配置,也可用于内陆拖船(也称为拖船)的较小型拖曳绞车系统。
30.在拖曳操作中,多个电机和制动卡钳的存在允许绞车系统的灵活控制,从而预期到许多可能发生的情况。绞车系统的控制可以根据情况进行最佳调整。在恶劣条件下,所有可用的电机和制动卡钳都可以启动,而在更温和的条件下,电机和制动卡钳的仅一部分可能参与控制绞车系统。主动电机和制动卡钳可在其最佳操作范围内使用,以分别提供所需的驱动或制动扭矩。
31.在控制拖曳绞车系统时,可以仅驱动电机总数中的一个或多个电机,这可能有利于驱动器的热管理。有利的是,拖曳绞车系统可以在没有主动电机冷却的情况下实施。
32.存在多个电机和制动卡钳的另一个优点可以是,尽管存在对任何项目的维修需求,但是操作仍然可以继续。对于某项操作,一定数量的电机或制动卡钳可能是多余的。控制单元可以从操作中排除一个或多个项目,其中剩余项目可以接管被排除项目的功能。因此,与单个电机驱动器或单个制动器相比,绞车系统在操作中的可靠性可以大大增加。为了正确操作和继续,根据本发明的拖曳绞车系统较少依赖于其所有部件的适当工作。
33.在本发明的第一方面,根据本发明的拖曳绞车系统进一步提供改进在于驱动器包括多个无刷交流电机。这种无刷交流电机也被称为永磁同步电机(pmsm)。该电机具有电机转子,该电机转子提供有一定数量的永磁体。电机定子提供有等量的励磁线圈来激励电机转子。每个电机具有电机外壳和电机输出轴。电机齿轮连接到电机输出轴,该电机齿轮与安装在卷筒上的齿轮接合。电机齿轮和连接到卷筒的齿轮一起形成单级齿轮传动装置。
34.多个无刷ac电机的优点在于,这些电机可以提供高的电机扭矩,该电机扭矩可以在很宽的转速范围内传送。扭矩可以在低转速下传送,这有利于将卷筒从静止加速,但高扭矩也可在高转速下使用,以拉入或放出拖缆。无刷ac电机使拖曳绞车系统能够传递扭矩,该扭矩基本上在拖曳绞车系统的整个转速运行范围内保持可用。与异步感应电机相比,无刷ac电机提供的标称扭矩在转速的操作范围内基本恒定,而异步感应电机的标称扭矩性能在转速范围下限的15%以上可能会显著下降。
35.从上面的ep2830985的绞车可以看出,多个无刷ac电机可以使液压电机在拖曳操作中控制拖曳绞车系统变得多余。在根据本发明的拖曳绞车系统的实施例中,驱动器的控制完全是电动的。电驱动可能足够,并且驱动卷筒不需要液压电机。有利的是,根据本发明的拖曳绞车系统是环境友好的。
36.无刷ac电机的进一步的优点在于,驱动控制可以通过从该电机输出到控制单元的数据信号来改善。运行期间每个电机的数据输出可用于改善卷筒的控制。
37.有利的是,由于无刷ac电机的存在,拖曳绞车系统的单级齿轮传动装置可以在没有用于解耦驱动器的离合器的情况下实施。拖曳绞车系统可以保持没有离合器。包括齿轮并在齿轮周向处由电机齿轮接合的单级齿轮传动装置可以足够坚固以承受在高速卷筒旋转时发生的高拉力。拖曳绞车系统的单级齿轮传动装置可以在所有条件下运行,而不必要解耦驱动器以从卷筒松脱。因此,有利的是,根据本发明的拖曳绞车系统可以在没有离合器或其他联接元件的情况下实施,作为防止驱动器或齿轮传动装置故障的安全措施。
38.进一步有利的是,无刷ac电机可以允许在高速下放缆拖缆而不会过热。拖曳绞车系统可以在没有冷却回路的情况下实施。
39.在根据本发明的拖曳绞车系统的实施例中,无刷ac电机具有提供有至少8个永磁体的电机转子。优选地,至少8个永磁体包含钕材料,更特别地,至少8个永磁体包含钕铁硼材料。钕材料有利于使多个电机一起足够强大,以在拉入拖缆时将卷筒加速到高转速。有利的是,这种无刷ac电机有助于符合适于在恶劣条件下执行护航操作的拖曳绞车系统的机械要求。至少8个永磁体进一步有利于对变化的情况提供快速响应。当拖船在波浪上起伏时,为了保持拖缆处于张紧状态,卷筒必须向相反的方向旋转,以放缆并回收拖缆。电机转子的至少8个永磁体,更优选地至少16个永磁体,有助于快速响应,以保持拖缆张力在控制之下并防止拖缆松弛。
40.在根据本发明的拖曳绞车系统的实施例中,卷筒包括由水平布置的筒轴可旋转地支撑的筒。筒轴由框架支撑。水平布置的筒轴在拖曳操作中是有益的,在拖曳操作中,拖缆可以在与漂浮物体相关的大角度下被向上引导。优选地,筒轴布置成静止的。轴承安装到筒。轴承由筒轴支撑以允许筒旋转。有利的是,静止布置的筒轴允许卷筒的快速松脱和安装以进行定期维护。
41.在根据本发明的拖曳绞车系统的实施例中,齿轮安装到卷筒的筒。优选地,卷筒凸缘通过齿轮传动装置连接到驱动器。齿轮可以直接安装到筒的第一卷筒凸缘或第二卷筒凸缘。代替通过筒轴驱动卷筒,卷筒优选通过直接接合筒来驱动,这有利于传递驱动力。这种短的从驱动器通过齿轮传动装置直接到筒的传动系统提供坚固的结构。
42.在本发明的第二方面,齿轮具有由每个电机齿轮接合的外部带齿周向表面。优选地,接合齿轮的多个电机齿轮被定位在齿轮的下半区域中,使得卷筒与齿轮一起可以被提升远离电机齿轮,而无需将电机从框架拆卸。
43.根据本发明的第二方面,一种拖曳绞车系统,用于在拖曳操作期间(特别是在护航操作期间)控制拖缆在船舶与拖船之间的放缆和回收,该拖曳绞车系统包括:
44.‑
用于支撑绞车部件的框架;
45.‑
用于卷绕和放开拖缆的卷筒,其中卷筒由框架能旋转地支撑,其中卷筒具有筒,该筒在第一卷筒凸缘与第二卷筒凸缘之间形成用于包围拖缆的卷绕空间;
46.‑
驱动器,通过单级齿轮传动装置连接到卷筒,用于旋转卷筒以拉入拖缆,其中单级齿轮传动装置包括安装到卷筒的齿轮;
47.‑
制动器,连接到卷筒,用于制动卷筒以保持或放出拖缆;
48.‑
控制单元,用于基于输入信号控制驱动器和制动器,该输入信号指示由拖缆施加
在卷筒上的扭矩;
49.其中驱动器包括多个电机,其中每个电机具有电机外壳和电机输出轴,该电机输出轴提供有电机齿轮,该电机齿轮与安装到卷筒的齿轮接合,
50.其中制动器包括至少一个制动盘和多个制动卡钳,其中每个制动卡钳提供有一对制动垫,用于接合至少一个制动盘,其中每个电机齿轮接合到齿轮的外部带齿周向表面,其中多个电机齿轮和/或多个制动卡钳都定位在齿轮的下半区域中,使得卷筒、制动盘和/或齿轮可以从框架提升而无需拆卸电机和/或制动卡钳。
51.电机可以是液压电机或电机,特别是无刷ac电机。
52.优选地,筒由水平布置的筒轴可旋转地支撑,其中卷筒轴由框架支撑并且优选地布置成静止的。
53.齿轮优选被安装到筒的一个筒凸缘。
54.在根据本发明的拖曳绞车系统的实施例中,卷筒被定位在驱动器与制动器之间。第一卷筒凸缘连接到驱动器,并且第二卷筒凸缘连接到制动器的制动盘。由拖缆引入并作用在筒上的张力通过制动盘直接传递到制动卡钳。有利的是,这种用于扣除施加力的短路径有效地抵消拖曳绞车系统的张力。
55.在根据本发明的拖曳绞车系统的第三方面,框架包括用于支撑卷筒的主框架。主框架可以是箱形的。优选地,主框架具有左右侧板,该左右侧板提供有用于支撑筒轴的轴支撑件。进一步,主框架可以具有底板、前板和后板,该底板、前板和后板与侧板一起形成用于容纳绞车部件的内部空间。优选地,框架进一步具有枢转地连接到主框架的上部分的基板。因此,主框架的上部分围绕枢转轴线相对于基板是可枢转的以允许负载测量。枢转轴线在平行于基板的水平方向上延伸。至少一个负载传感器可以在与枢转轴线相距一定距离处被安装在底板与主框架之间,用于在拖曳操作期间测量卷筒上发生的负载。可以提供单个负载传感器,但是有利的是,可以提供第二负载传感器来获得多方向负载数据。至少一个负载传感器向控制单元提供负载数据以用于控制驱动器和制动器。
56.在根据本发明的拖曳绞车系统的实施例中,框架包括主框架和制动器框架。制动器框架可松脱地连接到主框架。独立的制动器框架可能有利于拖曳绞车系统的维修。制动器框架被布置成支撑多个制动卡钳。制动器框架具有用于每个制动卡钳的安装表面。特别地,制动器框架是l形的以沿着制动盘的周向设置多个制动卡钳。优选地,制动器框架是u形的。在u形制动器框架中,多个制动卡钳设置在内安装表面处以接合容纳在制动器框架的u形开口中的制动盘。u形制动器框架可以由两个独立的l形制动器框架的组件形成,这两个l形制动器框架相对定位并且彼此面对。
57.在根据本发明的拖曳绞车系统的实施例中,框架,特别是制动器框架,包括负载传感器,用于测量由制动卡钳引起的力。负载传感器可以是称重传感器。负载传感器可以定位在制动器框架的凹陷部中。负载传感器可操作地连接到控制单元。负载传感器产生负载传感器信号作为控制单元的输入。基于负载传感器信号,控制单元向拖曳绞车系统的驱动器和制动器产生输出信号。
58.根据本发明的第三方面,一种拖曳绞车系统,用于在拖曳操作期间,特别是在护航操作期间,控制拖缆在船舶与拖船之间的放缆和回收,该拖曳绞车系统包括:
59.‑
用于支撑绞车部件的框架;
60.‑
用于卷绕和放开拖缆的卷筒,其中卷筒由框架能旋转地支撑,其中卷筒具有筒,该筒在第一卷筒凸缘与第二卷筒凸缘之间形成用于包围拖缆的卷绕空间;
61.‑
驱动器,通过单级齿轮传动装置连接到卷筒,用于旋转卷筒以拉入拖缆,其中单级齿轮传动装置包括安装到卷筒的齿轮;
62.‑
制动器,连接到卷筒,用于制动卷筒以保持或放出拖缆;
63.‑
控制单元,用于基于输入信号控制驱动器和制动器,该输入信号指示由拖缆施加在卷筒上的扭矩;
64.其中驱动器包括多个电机,其中每个电机具有电机外壳和电机输出轴,该电机输出轴提供有电机齿轮,该电机齿轮与安装到卷筒的齿轮接合,
65.其中制动器包括至少一个制动盘和多个制动卡钳,其中每个制动卡钳提供有一对制动垫,用于接合至少一个制动盘,
66.其中框架,特别是制动器框架,包括至少一个负载传感器,用于测量由制动卡钳引起的力。
67.优选地,框架包括主框架,该主框架包括基板,其中主框架的上部分围绕枢转轴线可枢转地连接到基板,其中至少一个负载传感器,特别是两个负载传感器,在与枢转轴线相距一定距离处被定位在上部分与基板之间。在根据本发明的拖曳绞车系统的实施例中,至少一个筒凸缘具有码,用于指示筒的卷绕空间中可用的拖缆数量。优选地,码是彩色码,用于视觉地指示卷绕空间的预定卷绕区域。特别地,彩色码在筒凸缘内侧具有彩色环形区域,以指示卷绕区域。优选地,环形区域是黄色环形区域。彩色码优选地包含至少两种不同的颜色,例如黑色和黄色,以在拖缆离开卷绕区域时向船长/拖缆操作员进行视觉指示。在特定实施例中,码可以包括用于检测筒的卷绕空间中可用的拖缆数量的传感器。优选地,传感器是用于检测彩色码的颜色变化的光学传感器。
68.进一步,本发明涉及一种包括根据本发明的拖曳绞车系统的拖船。
69.进一步,本发明涉及一种通过拖缆互连的拖船和和漂浮物体的组件以及一种根据本发明的拖曳绞车系统。
70.根据本发明的下一方面,本发明涉及一种具有卷筒的拖曳绞车系统,该卷筒具有筒,其中该筒具有第一筒凸缘和第二筒凸缘,以形成用于包围拖缆的卷绕空间,其中卷绕空间具有预定的卷绕区域,并且其中码被提供来指示卷绕区域。
71.进一步,本发明涉及一种通过拖船拖曳漂浮物体特别是像油轮或船只这样的船舶的方法。该方法也被称为拖曳方法,或者特别是一种用于为船舶护航的护航方法。
72.在根据本发明的方法中,使用根据本发明的拖曳绞车系统。在该方法的步骤中,根据本发明的拖曳绞车系统被提供。该拖曳方法包括拉入拖缆的步骤、放出拖缆的步骤以及测量由拖缆在拖曳绞车系统的卷筒上引起的产生的扭矩的步骤。该拖曳方法包括控制拖曳绞车系统的驱动器以旋转卷筒用于拉入拖缆的步骤,以及控制拖曳绞车系统的制动器以制动卷筒用于保持或放出拖缆的步骤。
73.在根据本发明的方法的实施例中,多个制动卡钳和/或电机中的仅一部分被启动以分别制动或驱动卷筒。拖曳绞车系统可以被配置成对于特定的拖曳操作具有过剩的能力,这有利于增加拖曳绞车系统的寿命和操作连续性。
附图说明
74.将参照附图更详细地解释本发明。附图示出根据本发明的实际实施例,其不可被解释为限制本发明的范围。特定特征也可以被认为是与所示实施例不同的,并且可以在更广泛的上下文中被认为是划界特征,不仅对于所示实施例是如此,而且作为共同特征对于落入所附权利要求范围内的所有实施例也是如此,其中:
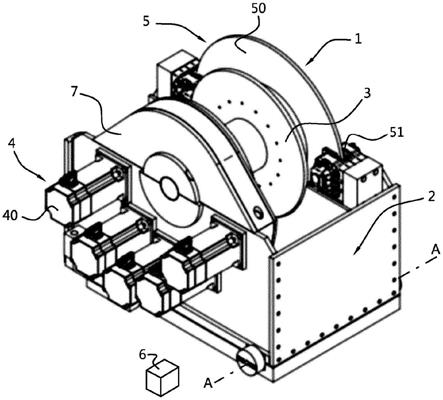
75.图1和图2示出根据本发明的拖曳绞车系统的透视图;
76.图3示出图1的拖曳绞车系统的分解视图;
77.图4
‑
图6示出图1
‑
图3中的拖曳绞车系统的正交视图;以及
78.图7示出拖曳绞车系统的制动器框架。
79.附图中使用相同的附图标记来表示相同或功能相似的部件。在本说明书中,垂直和水平指的是通常意义上的平面或方向。与船舶或拖船有关的水平或垂直限定的方向是在船舶或船处于漂浮位置、处于正常的稳定位置时采用的。
具体实施方式
80.图1和图2示出根据本发明的拖曳绞车系统1的透视图。图3示出拖曳绞车系统的分解视图,并且图4
‑
图6分别示出拖曳绞车系统的前视图、俯视图和侧视图。拖曳绞车系统被配置用于执行拖曳操作,特别是护航操作。
81.与锚泊和系泊等其他操作相比,拖曳操作通常使用相对长的水平延伸拖缆进行。在护航操作中,通常,至少100米的拖缆被布置在拖船与漂浮物体(例如油轮或船舶)之间。拖船正在操纵以沿着预定的轨迹引导船舶。在这些护航行动期间,为防止松弛,拖缆应保持拉紧状态。一方面,为了防止拖缆断裂,张力不得超过一定值。应注意,高张力可能会突然发生,并且拖曳绞车系统应做出相应响应。另一方面,为了防止松弛,拖缆不得松散地悬挂在漂浮物体与拖船之间。在这种情况下,拖曳绞车系统应该快速卷绕拖缆。因此,为了在护航操作中执行,拖曳绞车系统1需要抵抗发生的例如100吨至300吨的高峰值负载,同时拖曳绞车系统需要在两个方向上以高转速响应,以在松弛发生时补偿大的拖缆长度。
82.根据本发明的拖曳绞车系统1被配置成在拖曳操作中发生的这些重环境下运行。拖曳绞车系统1包括用于保持卷筒3的框架2、驱动器4、制动器5和齿轮传动装置7。控制单元6被提供来控制拖曳绞车系统。
83.在图1
‑
图6例示的实施例中,卷筒3定位在驱动器4与制动器5之间。可替代地,驱动器和制动器都可以位于卷筒的一端。
84.驱动器4通过齿轮传动装置7连接到卷筒3以用于加速卷筒。制动器5包括连接到卷筒3的制动盘50和多个用以接合制动盘50的制动卡钳51,该制动卡钳51连接到框架2,使得卷筒3可以被制动器5减速。驱动器4和制动器5可操作地连接到控制单元6。控制单元6被编程为通过控制驱动器4和制动器5来控制卷筒3的旋转。多个制动卡钳51有利于通过允许一个或多个制动卡钳51接合制动盘来控制卷筒的减速。通过改变主动制动卡钳51的数量,卷筒3可以根据护航操作期间发生的情况而减速。
85.驱动卷筒3的驱动器4是电驱动器。这里,驱动器4是完全电动的。驱动器4包括多个无刷交流电机40。每个电机40具有其自己的电机外壳41和电机输出轴42。多个电机40是有益的,这是因为通过启动一个或多个电机的选择,拖曳绞车系统被配置为预测在护航操作
期间发生的不同情况。
86.电机40是无刷ac电机,也称为永磁同步电机pmsm。该电机具有提供有永磁体的电机转子以提供磁场。电机转子带有一定数量的永磁体。优选地,永磁体在电机转子的外周向表面处以圆形阵列等距间隔开。永磁体限定电机的一定数量的电机磁极。特别地,电机转子具有至少8个电机磁极。优选地,电机转子具有至少16个电机磁极。大量的电机磁极可能有利于获得基本恒定的驱动扭矩。有利的是,至少16个电机磁极有助于提供高扭矩,其在卷筒的宽的转速范围内保持可用。
87.优选地,永磁体包含钕。优选地,永磁体是钕铁硼磁体。有利的是,含钕磁体有助于更强大的电机。
88.电机40具有用于容纳多个励磁线圈的电机外壳。电机转子可由多个励磁线圈驱动。励磁线圈形成电机定子。励磁线圈优选位于电机转子的周向周围。励磁线圈的数量对应于电机磁极的数量。
89.图3示出图1的拖曳绞车系统1的分解视图。拖曳绞车系统具有可安装到拖船的甲板的框架2。框架2被布置成容纳拖曳绞车系统1的绞车部件。这里,框架2具有模块结构。框架2由主框架20、制动器框架21和筒框架22组装而成。
90.主框架20是块状的,由底板200、左右侧板220、前板230和后板240组装而成。形成主框架20的板提供用于接纳绞车部件的内部空间。
91.主框架20进一步包括基板250。主框架20枢转地连接到基板250。主框架20围绕枢转轴线251相对于基板215可枢转。枢转轴线a
‑
a在横向于主框架20的水平方向上延伸。枢转轴线从左侧板220延伸到右侧板220。至少一个负载传感器60定位在底板200与基板250之间,以用于在拖曳操作期间测量负载。至少一个负载传感器60定位在与枢转轴线a
‑
a相距一定距离处。在拖曳操作期间,拖缆上的张力将在筒30上施加扭矩,该扭矩将由制动器5至框架2扣除并由至少一个负载传感器60测量。这里,枢转轴线251包括安装在主框架20后部区域的枢轴。这里,如图4所示,两个负载传感器60安装在主框架20的前部区域。至少两个负载传感器有利于获得多向负载数据。
92.每个侧板220提供有用于支撑筒轴33的绞车轴支撑件221。这里,筒轴33被布置成静止的。筒30相对于筒轴33可旋转。左右绞车轴锁222被提供为将筒轴33夹持到主框架20的侧板220的绞车轴支撑件221。
93.卷筒3被布置用于卷绕和展开拖缆。卷筒包括筒30,该筒30具有在第一筒凸缘31与第二筒凸缘32之间的卷绕区域320。这里,第一筒凸缘31和第二筒凸缘32中的至少一个提供有视觉卷绕指示器,以指示预定的卷绕区域。优选地,筒凸缘31、32的视觉卷绕指示器由双色指示器提供,该双色指示器包括两种视觉的不同颜色,例如黑色和黄色。卷绕区域的底部区域的黄色可以指示卷绕区域的子区域,其在操作期间应该始终保持卷绕。筒30由安装在筒30的筒轴承34支撑。筒轴33由框架2在第一绞车轴支撑件和第二绞车轴支撑件221处支撑。
94.图3进一步示出齿轮传动装置,该齿轮传动装置7是单级齿轮传动装置。齿轮传动装置7提供卷筒3的直接驱动。齿轮传动装置7将电机输出轴42的应用转速一步降低到卷筒3的转速。齿轮传动装置7在一阶段中提供至少15∶1的传动比。
95.齿轮传动装置7包括固定到第一筒凸缘31的齿轮70。齿轮70和连接的卷筒3可通过
接合电机齿轮71来驱动。每个电机齿轮71直接安装到电机40的电机输出轴42。齿轮70可以具有待接合的内部带齿表面。优选地,齿轮70具有外部带齿表面,其中电机齿轮71从外部接合到齿轮70。有利地,齿轮71在齿轮70外部的布置允许在维护中快速移除齿轮,同时保持电机40安装到侧板220。
96.此外,电机40以拱形阵列定位。优选地,拱形阵列不延伸到圆形阵列的下半部之外,这有利于拖曳绞车系统的维护,从而允许卷筒3从绞车轴支撑件221提升而不需要拆卸任何电机40。
97.如图3所示,这里,电机板49被提供以用于将电机42安装到框架2的侧板220,也称为电机侧板。电机板49可以与电机40的电机外壳41一体形成或者可单独连接到该电机外壳41。电机板49允许快速且容易地将电机40可调节地安装到电机侧板220。
98.电机侧板220包括多个电机孔,每个电机孔为每个安装的电机40的每个电机输出轴42提供通道(through)。电机40通过其电机板49可安装到电机孔。如上所述,每个电机输出轴42都提供有电机齿轮71。组装之后,电机齿轮71定位在齿轮室27内的主框架20的内部空间中。齿轮室27被配置用于容纳齿轮传动装置7的齿轮70。齿轮室27被齿轮盖79覆盖以包围齿轮70。
99.如图1
‑
图6所示,制动器5相对于驱动器4定位在卷筒3的相对侧。制动盘50固定在卷筒3的第二筒凸缘32。
100.在操作中,制动盘50与卷筒3一起旋转。制动卡钳51定位在制动盘50的周向处。每个制动卡钳51提供有一对制动垫52以接合制动盘50的平坦端表面。优选地,制动卡钳51以与电机40相似的方式定位,这有利于维修拖曳绞车系统。制动卡钳51以拱形阵列定位。优选地,拱形阵列被局限在圆形阵列的下半部内,以允许在维护期间向上移除制动盘50,同时保持制动卡钳51安装在其位置。
101.图7以单独的视图示出制动器框架21和制动卡钳51的子组件。多个制动卡钳51安装到制动器框架21。制动器框架21是u形的。u形制动器框架21包括用于安装多个制动卡钳51的内安装表面。u形制动器框架21具有直立的u形腿210,该u形腿210通过u形桥部分211互连。u形腿在它们之间形成空间,以用于接纳制动盘50。制动盘50可以降低到该空间中,使得制动盘50可被每个制动卡钳51接合。
102.u形腿210中的一个提供有用于液压连接多个制动卡钳51的分配器53。分配器53提供用于控制多个制动卡钳51的中央液压连接器。制动器框架21的可松脱子组件有利于维修拖曳绞车系统。
103.如图7所示,在可替代的实施例中,制动器框架21可以提供有负载传感器60。负载传感器60被配置为测量制动器框架21的变形。在操作中,变形是由拖缆施加在卷筒3上的张力引起的。测量的变形指示扭矩,该扭矩作用在卷筒3上,并通过筒30、连接的制动盘50和接合的制动卡钳51传递到制动器框架21。优选地,负载传感器60定位在u形制动器框架21的下部区域,特别是在拐角位置。
104.除了图中所示的实施例之外,许多变型也是可能的。在驱动器与制动器之间的筒的例示实施例的变型中,在可替代的实施例中,驱动器和制动器可以都定位在筒的一侧。在可替代的实施例中,制动器可以包括一个以上的制动盘,每个制动盘可以与一组制动卡钳接合。
105.尽管已经详细描述本发明,但是对于本领域的技术人员来说很明显的是,在不脱离要求保护的本发明的范围的情况下,可以进行各种改变和修改。所有这种变化和修改旨在包含在本公开和权利要求的范围内。
106.因此,本发明提供一种拖曳绞车系统,以用于在拖曳操作期间控制拖缆的放缆和回收。拖曳绞车系统具有控制单元,该控制单元用于控制驱动器和制动器,以分别用于驱动和制动卷筒。在第一方面,驱动器包括多个无刷交流电机,每个无刷交流电机通过电机齿轮在一阶段中接合到安装到卷筒的齿轮。制动器包括多个制动卡钳,每个制动卡钳可与安装在卷筒上的制动盘接合。多个无刷ac电机、单级齿轮传动装置和多个制动卡钳的传动系统形成强大且坚固的结构,以在拖曳操作中可能发生的恶劣条件下操作拖曳绞车系统1。
107.附图标记列表:
108.1 拖曳绞车系统
109.2 框架
110.3 卷筒
111.4 驱动器
112.5 制动器
113.6 控制单元
114.7 齿轮传动装置
115.20 主框架
116.200 底板
117.220 侧板
118.221 绞车轴支撑件
119.222 绞车轴锁
120.230 前板
121.231 拖缆孔
122.240 背板
123.250 基板
124.251 枢转轴线a
‑
a
125.21 制动器框架
126.210 u型腿
127.211 u型桥部分
128.22 筒框架
129.27 齿轮室
130.30 筒
131.31 第一筒凸缘
132.32 第二筒凸缘
133.320 卷绕区域
134.33 筒轴
135.34 筒轴承
136.40 电机
137.41 电机外壳
138.42 电机输出轴
139.49 电机板
140.50 制动盘
141.51 制动卡钳
142.52 制动垫
143.53 分配器
144.60 负载传感器
145.70 齿轮
146.71 电机齿轮
147.79 齿轮盖。