1.本发明涉及电动船舶的技术领域。
背景技术:
2.现有船舶大多仍然采用燃油作为能源供给,但随着电动汽车的普及,对电动船舶的研究也越来越多。由于现有的蓄电池组能量密度有限,因此电动船舶需要经常回到岸边充电,目前多采用的充电方式为人工有线充电,而无线充电的方式相对于有线充电的方式更加安全便捷。
3.在现有的无线充电技术中,应用较多的感应式无线充电的传输功率一般可达几百瓦,传输距离为10cm以内,但其抗偏移能力较低,即其对系统两侧的相对位置要求高,若位置偏差增大,传输效率也会明显降低。
4.另一方面,现有电动船舶的停泊和充电多依赖于人工操作,其效率较低且强度大,不利于现代电动船的应用,无法适应电动船全天候智能化作业的要求。
技术实现要素:
5.本发明的目的在于提供一种可实现高效、智能化充电的电动船及可供该电动船进行高效、稳定的、多模式充电的停泊系统和停泊充电方法。
6.本发明首先提供了如下的技术方案:
7.可进行智能充电的电动船,其包括:电动船本体及部分设置于本体上、部分设置于停泊位置处的智能充电系统,其中,所述电动船本体内设有电能存储装置,所述智能充电系统包括无线充电系统;其中,所述无线充电系统包括设置于电动船本体上表面的升降机构、设置于所述升降机构上的电能接收机构及感应所述电能接收机构位置的传感器、和为所述电能接收机构提供电能的设置于所述停泊位置处的电能发射机构;其中,所述电能接收机构包括相互电相连的、可与所述电能存储装置形成充电回路的电能接收线圈、第一整流器和接收回路控制器,所述电能发射机构包括相互电相连的、可与设置于所述停泊位置处的电源形成放电回路的电能发射线圈、高频逆变器和第二整流器;其中,所述电能发射线圈设置于所述电动船的停泊位置上方。
8.根据本发明的一些优选实施方式,所述升降机构包括:底座、升降板、连接所述底座与所述升降板的剪式支撑架;其中,所述剪式支撑架包括结构相同的、对称设置的两个支撑单元,每个支撑单元均包括:相互交叉、并在交叉点相对固定的第一支撑臂和第二支撑臂,所述第一支撑臂和所述第二支撑臂的上端与所述升降板相连,所述底座上设置有与所述两个支撑单元分别对应的第二导轨,及设置有连接两个支撑单元的连接轴,且所述第一支撑臂和所述第二支撑臂的下端固定于所述连接轴上,且所述连接轴的端部固定有分别嵌入所述第二导轨内的由电驱动装置驱动的第二滑块。
9.根据本发明的一些优选实施方式,所述电驱动装置即第二滑块驱动装置包括:通过曲柄连杆机构与所述第二滑块相连的第一电机及第一电机控制器。
10.根据本发明的一些优选实施方式,所述智能充电系统还包括有线充电系统,所述有线充电系统包括设置于所述电动船的停泊位置上方的、与电源相连的充电件及与所述充电件配合的、设置于所述电动船本体上的、与所述电能存储装置相连的充电接口。
11.根据本发明的一些优选实施方式,所述充电件包括可进行上下伸缩的升降体、位于升降体下端的充电枪,及位于所述升降体内对升降体进行控制驱动的升降柱驱动装置,所述升降柱驱动装置进一步包括:与所述升降体通过液压活塞机构相连的第二电机及第二电机控制器。
12.根据本发明的一些优选实施方式,所述充电枪端部设置有与所述充电接口配合的锁钩,及设置于所述充电枪内部的锁钩驱动装置;所述锁钩驱动装置包括与所述锁钩通过驱动连接机构相连的第三电机及第三电机控制器,所述驱动连接机构包括与所述锁钩尾端相连的弹性件及与该弹性件相连的旋转轴件,所述锁钩可绕所述轴件进行旋进或旋出。
13.本发明进一步提供了可用于上述电动船进行停泊充电的停泊系统,其包括:
14.设置于所述停泊位置处的停泊装置及通信控制系统,所述通信控制系统包括设置于所述本体上的、与所述无线充电系统通信或电相连的第一通信模块、和设置于所述停泊位置处的第二通信模块,所述第一通信模块和所述第二通信模块间通信相连。
15.根据本发明的一些优选实施方式,所述停泊装置包括:围绕所述本体头部或部分或全部船身的浮动件,位于所述浮动件外侧、其与所述电动船之间的固定件,一端固定于所述固定件上、另一端穿透所述浮动件后与所述停泊位置滑动相连的第一滑块,设置于所述停泊位置内侧上的、与所述第一滑块进行上下连接配合的第一导轨。
16.根据本发明的一些优选实施方式,所述停泊装置还包括:部分或全部覆盖所述固定件的表面的缓冲件。
17.根据本发明的一些优选实施方式,所述停泊装置还包括:水平方向相对设置的、可与电动船本体两侧设置的接收件配合的锁止机构,所述锁止机构包括固定于所述停泊装置上的弹性连接件、与该弹性连接件相连的锁舌、及锁舌驱动装置,所述锁舌驱动装置包括第四电机和第四电机控制器,其中所述第四电机通过曲柄连杆机构与所述锁舌相连,所述第四电机控制器与所述第一通信模块电相连或通信相连。
18.其中,所述接收件可简化为设置于电动船本体两侧的两个凹槽。
19.根据本发明的一些优选实施方式,所述第二通信模块与有线充电系统电相连或通信相连。
20.根据本发明的一些优选实施方式,所述第一通信模块还与充电模式选择控制器电相连,和/或所述第二通信模块还与停泊位置调度控制器电相连。
21.本发明具备以下有益效果:
22.本发明可实现电动船的智能充电,或更进一步地,可实现电动船的停泊智能充电,在一些具体实施方式中,电动船可选择无线充电或有线充电两种充电模式,在无线充电模式中,通过升降机构及通信控制系统可准确调整电能接收线圈和电能发射线圈之间的距离,保证无线充电的效率,且所述停泊系统可随着水位变化上下、前后调整位置,同时维持稳定的水平固定,进一步增强无线充电效率;在有线充电模式中,通过升降柱及通信控制系统可准确调控充电枪和充电接口的连接,在保持船体相对稳定的同时保持其位置的灵活可调性。
23.本发明可以实现电动船停泊的自动化,停泊和充电过程均无需人工操作,显著提高了工作效率。
附图说明
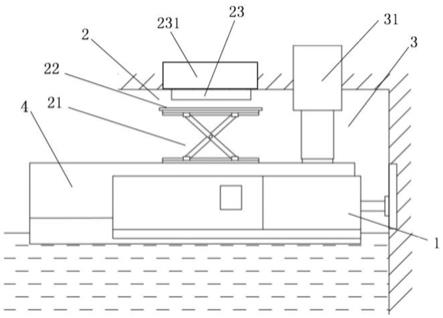
24.图1为本发明具体实施方式提供的电动船停泊充电系统结构示意图。
25.图2为本发明具体实施方式提供的电动船与停泊装置的配合结构俯视图。
26.图3为本发明具体实施方式提供的停泊装置结构示意图。
27.图4为本发明具体实施方式提供的电动船结构示意图。
28.图5为本发明具体实施方式提供的充电接口结构示意图。
29.图6为本发明具体实施方式提供的充电柱结构示意图。
30.图7为本发明具体实施方式提供的充电枪锁钩示意图。
31.图8为本发明具体实施方式提供的停泊充电系统的结构框图。
32.其中:
33.1、停泊装置;11、固定装置;111、锁止机构;112、缓冲带;113、锁舌;12、漂浮板;13、第一滑块;14、第一导轨;2、无线充电系统;21、升降机构;211、底座;212、升降板;213、剪式支撑架;214、第二导轨;215、第二滑块;216、连接轴;217、第一支撑臂;218、第二支撑臂;22、电能接收机构;23、电能发射机构;231、充电控制柜;3、有线充电系统;31、充电柱;311、升降柱;312充电枪;313、锁钩;32、充电接口;321、第一凹槽;4、电动船;41、第二凹槽。
具体实施方式
34.以下结合实施例和附图对本发明进行详细描述,但需要理解的是,所述实施例和附图仅用于对本发明进行示例性的描述,而并不能对本发明的保护范围构成任何限制。所有包含在本发明的发明宗旨范围内的合理的变换和组合均落入本发明的保护范围。
35.根据本发明的技术方案,一种具体的电动船停泊充电系统如图1所示,其包括:供电动船4停泊的与停泊位置(如岸壁)相连的停泊装置1及设置于电动船4上的用于其停泊时进行充电的智能充电系统,其中,智能充电系统包括无线充电系统2和有线充电系统3,无线充电系统2进一步包括电能存储装置、升降机构21、电能接收机构22、电能发射机构23和控制电能发射的设置于停泊位置上方的充电控制组件231,有线充电系统进一步包括设置于停泊位置上方的与电源相连的充电柱31。
36.在一些更具体的实施例中,所述存储电源可选择如蓄电池。
37.在一些更具体的实施例中,参照图2,所述停泊装置1包括:围绕电动船4船头和部分或全部船身的浮动件12、优选的其由漂浮板形成,固定或组装于浮动件12上、位于其与电动船之间的固定件11,部分或全部覆盖所述固定件11的表面的缓冲件112,设置于所述固定装置11上并与所述停泊位置滑动相连的第一滑块13,固定于停泊位置内侧上的、与第一滑块13进行上下连接配合的第一导轨14,通过第一滑块13与第一导轨14的配合可使停泊装置1根据水位上下移动,并保证停泊装置1和所述电动船4处于同一高度,便于连接。
38.其中,缓冲件112可进一步由固定于固定装置11内壁的缓冲材料形成,其可减小电动船4和固定装置11之间的冲击,提高停泊的稳定性和安全性。
39.在一些更具体的实施例中,参照图3,所述停泊装置中,固定装置11可包括部分或
全部覆盖所述浮动件12表面的本体及两个固定于其本体上的、在水平方向上相对设置的、与电动船4的船体两侧接触的锁止机构111,进一步的,锁止机构111可包括固定于本体上的弹性连接件、与该弹性连接件相连的锁舌113、及锁舌控制器,具体的弹性连接件可选择如弹簧等器件,锁舌控制器可选择如电机和电机控制器,其中电机通过曲柄连杆机构与锁舌113相连,通过电机控制器控制电机转动带动曲柄连杆机构运动,从而实现锁舌113联动。
40.通过以上停泊装置1,可使停泊的电动船仅在上、下方向做一些灵活浮动,但在两侧的相对位置上得到稳定的固定,并在两侧具有灵活的抗偏移能力,以实现高效地无线充电。
41.在一些更具体的实施例中,参照图4,设置于电动船4上的智能充电系统的无线充电系统2中,升降机构21包括底座211、升降板212、连接底座211与升降板212的剪式支撑架213,其中,剪式支撑架213包括结构相同的、对称设置的两个支撑单元,每个支撑单元均包括:相互交叉、并在交叉点相对固定的第一支撑臂217和第二支撑臂218,第一支撑臂217和第二支撑臂218的上端和升降板212相连,进一步的,在底座211上设置与两个支撑单元分别对应的第二导轨214,在底座211上、两个支撑单元之间还设置有连接轴216,且第一支撑臂217和第二支撑臂218下端固定于连接轴216上,同时连接轴216的端部固定有分别嵌入第二导轨214内的第二滑块215,其中,进一步的,第二滑块215由驱动装置驱动,驱动装置可以选择如电机和电机控制器,其中电机通过曲柄连杆机构与第二滑块215相连,通过电机控制器控制电机转动带动曲柄连杆机构运动,从而实现第二滑块215的联动,优选的该电机和电机控制器可安装于底座211上。
42.在一些更具体的实施例中,该电动船4的船体两侧还设置有与以上停泊装置1配合的,特别是可供所述锁舌113卡入的第二凹槽41及供所述充电柱31插入的充电接口32,该充电接口32进一步与电能存储装置如蓄电池相连。
43.进一步的,参照图5,所述充电接口32上还设有与充电柱31配合的第一凹槽321,两者配合后可对充电柱31进行固定,防止电动船4在水中晃动时充电枪312脱落影响充电效率。
44.对应的,参照图6,所述充电柱31包括可进行上下伸缩的升降柱311、位于升降柱311下端的充电枪312,与所述第一凹槽321配合的锁钩313,及位于升降柱311内对升降柱进行控制驱动的驱动装置,在一种具体实施方式中,所述驱动装置可包括电机、电机控制器、双向液压泵、控制阀、油缸和活塞杆,通过电机控制器控制电机正反转,从而驱动双向液压泵正反输出压力油,经液压控制阀送至油缸,实现活塞杆的往复运动带动升降柱下降及上升。
45.进一步的,参照图7,在一种优选实施方式中,所述充电枪312在其内部还设置有锁钩313驱动装置,其包括与锁钩313尾端相连的驱动连接机构和与驱动连接机构相连的电机及电机控制器,其通过电机控制器控制电机转动带动驱动连接机构运动,从而实现锁钩313的联动,具体的,所述驱动连接机构可选择包括与锁钩313尾端相连的弹簧及与弹簧固定的旋转轴,锁钩313可绕轴向外旋转,在充电枪312下降过程中,锁钩313头部与充电接口32壁挤压,使其绕旋转轴向外旋转,抵达第一凹槽321时锁钩313在弹簧作用下弹回完成锁止,在解除锁止时电机控制器控制电机带动锁钩313向外旋转实现解锁。
46.进一步的,参照图8,电动船停泊充电系统中还包括智能控制系统,具体包括停泊
控制组件、无线充电控制组件、有线充电控制组件及通信控制组件,其中停泊控制组件可进一步包括设置于所述升降机构中用于带动传动结构的电机、与电能存储装置如蓄电池相连的电机控制器、和用于传感电能发射线圈位置的传感器,该电机控制器根据传感器的反馈对电机进行控制;无线充电控制组件包括设置于电能接收机构22中的电能接收线圈、与其电相连的整流器和电能接收回路控制器,电能接收回路控制器与蓄电池电相连,以使接收到的电能储存在船载蓄电池中,设置于电能发射机构23中的与电能接收线圈形成感应式发射
‑
接收回路的电能发射线圈、与其电相连的高频逆变器和整流器,整流器进一步与停泊位置处设置的电源相连,高频逆变器和整流器也可放置在停泊位置上设置的充电控制柜中;有线充电控制组件可进一步包括设置于所述充电柱内用于带动所述锁钩313运动的电机、其控制器,用于带动充电枪312的升降柱311升降的电机、其控制器,其中,两个控制器分别与设置于停泊位置处的电源相连;通信控制组件包括设置于电动船上的第一通信模块和设置于停泊位置处的第二通信模块,两者间相互通信以实现泊位调度,第一通信模块与停泊装置及无线充电系统中的各电机控制器电相连或通信相连,第二通信模块与有线充电系统中的各电机控制器电相连或通信相连,在一些更优选的实施例中,所述第一通信模块还与充电模式选择控制器电相连,所述第二通信模块还与调度控制器电相连,以根据通信内容进行泊位调度和充电模式选择。
47.在上述系统下,当电动船4靠近岸边时,第一通信模块与岸边的第二通信模块达成通信,由岸边调度控制器判断泊位情况,选择合适的泊位并通过第二通信模块将泊位信息传递给电动船4的第一通信模块,其后控制器控制电机驱动电动船4驶向预定的泊位,当电动船4通过引导斜面进入泊位后,船体与锁舌113的斜面接触使得斜面受力,锁舌113挤压弹簧向里收缩,当电动船4侧面的第二凹槽抵达锁舌113位置时,弹簧将锁舌113推出并卡住凹槽41,电动船4完成停泊固定,当其驶离时,锁舌控制器控制电机带动滑块三运动,滑块三带动锁舌113收缩,解除对电动船4的锁止,电动船4可驶离泊位。
48.当电动船4停泊完成后,由充电模式选择控制器确定使用无线充电模式还是有线充电模式。
49.当选用无线充电模式时,固定于升降板上的升降机构传感器感应电能发射线圈的位置,由控制器控制驱动装置带动滑块二215滑动,从而带动剪式支撑架213收缩,升降板212上升,当升降板212上升到与电能发射线圈合适距离时停止上升,其后电能接收线圈和电能发射线圈配合,以使其在同一频率上共振,电能接收线圈和整流器、船载电池连接形成充电电路,电能接收回路控制器控制充电电流,开始充电。电池管理系统检测到充电完成后通过通信模块将信息传递给滑块控制器,滑块控制器控制驱动装置带动滑块二215滑动,使得升降板212下降到起始位置。
50.当选用有线充电模式时,升降柱控制器控制驱动装置带动升降柱311下降,当升降柱311下降至充电接口32位置时,充电枪锁钩314与充电接口壁接触,受到充电接口壁挤压充电枪锁钩314绕轴向外旋转,直到充电枪312与充电接口32接触时,充电枪锁钩314正好下降到凹槽一321位置,锁钩314弹回到凹槽一321中卡住凹槽一321,完成充电枪312和充电接口32的连接固定,充电枪312开始向充电接口32供电。检测到充电完成后,控制器和电机控制锁钩314脱离凹槽一321,升降柱311上升到起始位置。
51.若电动船4未获得驶离命令则保持停泊状态直到收到驶离命令,收到驶离命令后,
控制器下达指令控制电机带动锁舌113收缩,电动船4向后行驶,驶离泊位。
52.以上实施例仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。凡属于本发明思路下的技术方案均属于本发明的保护范围。应该指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下的改进和润饰,这些改进和润饰也应视为本发明的保护范围。