1.本实用新型属于无人艇技术领域,尤其涉及一种智能回航逃生无人艇。
背景技术:
2.近年来,随着科技的进步,人们对大海的开发和利用在不断地增加,但海洋平台事故的不断发生,使得海洋平台事故的防范也越来越使人重视起来。现有的海难逃生装置,都是传统救生艇或者充气救生筏,需要人为用桨手动划动或者使用螺旋桨发动机实现船体的推动,从而实现逃离。但在茫茫大海容易迷失方向,而且更重要的是,燃油有限,在有限的动力下,可能无法完成自救,进而转换为人力划桨,在没有稳定食物补充下,生还自救几率则会大大降低。
技术实现要素:
3.针对现有技术存在的不足,本实用新型提供一种智能回航逃生无人艇。
4.一种智能回航逃生无人艇,包括封闭逃生舱、船体、上防火隔热罩、下防火隔热罩、充气橡胶圈、双动力螺旋桨、船底配重块,所述封闭逃生舱设置在船体上部,所述船底配重块设置在船体底部,所述双动力螺旋桨安装在船体底部一侧;上防火隔热罩、下防火隔热罩分别安装在船体上、下最外部;所述充气橡胶圈设置在船体四周,内置充放气装置;所述封闭逃生舱上设置有舱门,舱门安装有把手和安全锁,舱门周围有密封胶条;封闭逃生舱内部内置有主控电脑、锂电池组和电机,所述电机、锂电池组与主控电脑电连接,所述电机与锂电池组电连接;所述充气橡胶圈内置的放气装置与主控电脑、锂电池组电连接;所述双动力螺旋桨与电机电连接,与电机构成双螺旋桨动力转向推进装置;
5.所述无人艇还包括设置在封闭逃生舱内并相互电连接并与主控电脑电连接的无线通讯系统、自主回航装置、氧气输送装置、太阳能发电装置,所述无线通讯系统、自主回航装置以及主控电脑构成导航系统实现自主航行。
6.所述上防火隔热罩和下防火隔热罩共同构成水滴状的防火隔热浮力罩。
7.所述舱门采用强化玻璃制作。
8.所述无线通讯系统包括通信天线和卫星移动无线电台,卫星移动无线电台设置在封闭逃生舱内部,通信天线设置在封闭逃生舱的顶端;卫星移动无线电台与主控电脑电连接,通信天线与主控电脑的卫星调制解调器以及卫星连接,实现卫星上网;卫星移动无线电台、通信天线与锂电池组电连接。
9.所述自主回航装置包括激光雷达传感器、声呐探测器和gps定位装置,激光雷达传感器安装在船体四周,声呐探测器设置在所述船底配重块底部,gps定位装置设置在封闭逃生舱内部;激光雷达传感器、声呐探测器、gps定位装置与主控电脑、锂电池组电连接。
10.所述氧气输送装置包括氧气瓶与空气探测仪,空气探测仪设置在封闭逃生舱内部,氧气瓶设置在封闭逃生舱的两侧,通过橡胶管连接封闭逃生舱内空气探测仪上的输送阀门;空气探测仪与主控电脑、锂电池组电连接。
11.所述太阳能发电装置包括太阳能发电板与太阳能控制器、逆变器,太阳能控制器、逆变器设置在封闭逃生舱内部,太阳能发电板铺设在封闭逃生舱顶部;所述太阳能控制器、逆变器主控电脑电连接;太阳能控制器、太阳能发电板、逆变器与锂电池组电连接。
12.所述封闭逃生舱内部还设置有固定座位,保持逃生人员稳定。
13.所述封闭逃生舱内部还设置有急救物品。
14.本实用新型的有益效果是:
15.1.本实用新型中船体与上下隔热罩整体呈水滴状,同时船底设置了配重块,保持船体的稳定,可防止在水面侧翻。
16.2.本实用新型的船体周围设置有橡胶充气装置即充气橡胶圈,可自由的充放气,作为船体的保护,为船体提供缓冲,减少船体受撞击的损坏、增加船体的安全性。
17.3.本实用新型设置了封闭逃生舱,舱体上设置有双向强化玻璃舱门,方便人员快速上艇,为成功的逃生提供更多的时间。
18.4.本实用新型设置了自主回航装置,不需要人工操作,只需打开主控电脑,无人艇就会自动导航逃生路线,避开障碍物,大大提高救援成功率。
附图说明
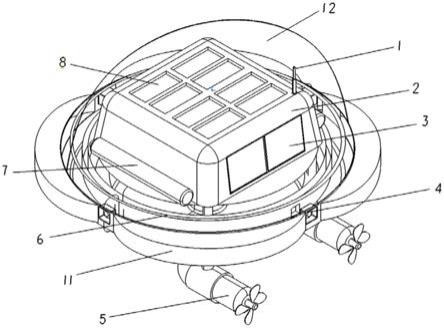
19.图1为本实用新型的整体结构示意图;
20.图2为图1的主视图;
21.图3为本实用新型的底部结构示意图;
22.图4为图1的仰视图;
23.图5为本实用新型中封闭逃生舱的内部结构示意图一;
24.图6为本实用新型中封闭逃生舱的内部结构示意图二;
25.图7为本实用新型中逃生舱的内部结构示意图三;
26.其中,
27.1通信天线,2封闭逃生舱,3双向玻璃舱门,4激光雷达传感器,5双动力螺旋桨,6船体,7氧气瓶,8太阳能发电板,9声呐探测器,10船底配重块,11充气橡胶圈,12上防火隔热罩,13下防火隔热罩,2
‑
1固定座位,2
‑
2急救物品,2
‑
3gps定位装置,2
‑
4空气探测仪,2
‑
5卫星移动无线电台,2
‑
6锂电池组,2
‑
7主控电脑,2
‑
8太阳能控制器,2
‑
9逆变器,2
‑
10电机。
具体实施方式
28.为了更好的解释本实用新型,以便于理解,下面结合附图,通过具体实施方式,对本实用新型的技术方案和效果作详细描述。
29.如图1
‑
4所示,一种智能回航逃生无人艇,包括封闭逃生舱2、船体6、上防火隔热罩12、下防火隔热罩13、充气橡胶圈11、双动力螺旋桨5、船底配重块10,所述封闭逃生舱2设置在船体6上部,所述船底配重块10设置在船体6底部,所述双动力螺旋桨5安装在船体6底部一侧;上防火隔热罩12、下防火隔热罩13分别安装在船体6上、下最外部;所述充气橡胶圈11设置在船体6四周,内置充放气装置,可根据船体6的稳定性充放气,同时为船体6的碰撞提供缓冲,减少船体6的损坏可以自行充气;充气橡胶圈11配合船底配重块10,可以有效的保证救生艇的稳定性,不会发生侧翻的情况,同时保证无人逃生艇在碰到障碍物时,不被破
坏。所述上防火隔热罩12和下防火隔热罩13共同构成水滴状防火隔热浮力罩,为透明外壳,水滴状防火隔热罩及船底配重块10使整个无人艇成不倒翁状,可实现在有风浪的海上保证船体6一直稳定,不侧翻。
30.所述封闭逃生舱2上设置有双向玻璃舱门3,舱门采用强化玻璃制作,受难者可以实时观察救生舱外的情况;所述舱门安装有把手和安全锁,舱门周围有密封胶条,可将舱门与外界隔绝开来。
31.所述无人艇还包括设置在封闭逃生舱2内并相互电连接并与主控电脑2
‑
7电连接的无线通讯系统、自主回航装置、氧气输送装置、太阳能发电装置、导航系统。
32.所述船体6四周安装有双激光雷达传感器4,本实施例中船体6四周均布有四个双激光雷达传感器4;所述船底配重块10底部设置有声呐探测器9。
33.如图5
‑
7所示,所述封闭逃生舱2内部设置有固定座位2
‑
1、急救物品2
‑
2、船体6的锂电池组2
‑
6、主控电脑2
‑
7、gps定位装置2
‑
3、卫星移动无线电台2
‑
5、空气探测仪2
‑
4、太阳能控制器2
‑
8、逆变器2
‑
9和电机2
‑
10;舱内固定座位2
‑
1可保持逃生人员稳定;太阳能控制器2
‑
8能够对电池起到保护作用;所述封闭逃生舱2顶部铺设有太阳能发电板8;封闭逃生舱2的顶端设置有通信天线1,与主控电脑2
‑
7的卫星调制解调器以及卫星连接,实现卫星上网,与岸上救援方、基站实现卫星网络连接;封闭逃生舱2的两侧设置有氧气瓶7,通过橡胶管连接封闭逃生舱2内空气探测仪2
‑
4上的输送阀门。
34.所述空气探测仪2
‑
4、卫星移动无线电台2
‑
5、太阳能控制器2
‑
8、逆变器2
‑
9、锂电池组2
‑
6、充气橡胶圈11内置的放气装置、双激光雷达传感器4、声呐探测器9、通信天线1、gps定位装置2
‑
3、电机2
‑
10与主控电脑2
‑
7电连接。
35.所述锂电池组2
‑
6、主控电脑2
‑
7、双动力螺旋桨5与电机2
‑
10电连接;所述锂电池组2
‑
6给电机2
‑
10供电,主控电脑2
‑
7通过电机2
‑
10控制螺旋桨的开关和方向。
36.所述太阳能控制器2
‑
8、太阳能发电板8、主控电脑2
‑
7、空气探测仪2
‑
4、卫星移动无线电台2
‑
5、逆变器2
‑
9、充气橡胶圈11内置的放气装置、双激光雷达传感器4、声呐探测器9、通信天线1、gps定位装置2
‑
3与锂电池组2
‑
6电连接。
37.所述无线通讯系统包括通信天线1和卫星移动无线电台2
‑
5,能够使无人艇与救援地保持联系,同时提供卫星通讯数据,保证路径规划导航。所述自主回航装置包括双激光雷达传感器4、声呐探测器9和gps定位装置2
‑
3,启动无人艇后,主控电脑2
‑
7通过gps定位装置2
‑
3定位船体6,规划出出事点与最近救援点之间的最短距离,利用内嵌双激光雷达传感器4、声呐探测器9实现航行中的船体6避障,进行自主回航;所述主控电脑2
‑
7带有双系统,大大增加无人艇的容错率,保证在其中一个系统出现问题时,依旧可以完成逃生救援任务,同时,主控电脑2
‑
7的双系统也可以有效的防止主控电脑2
‑
7出现问题,增加生还的成功率。所述氧气输送装置包括氧气瓶7与空气探测仪2
‑
4,空气探测仪2
‑
4自动监测舱内氧气含量,实时根据逃生舱内的氧气含量,自动调节氧气输送,保证人体的安全;本实施例中所述氧气瓶7为氧气储存器,利用空气探测仪2
‑
4,根据舱内氧气含量,调节氧气输送。所述太阳能发电装置包括太阳能发电板8与太阳能控制器2
‑
8、逆变器2
‑
9;所述双动力螺旋桨5和电机2
‑
10构成双螺旋桨动力转向推进装置。所述导航系统包括双激光雷达传感器4、通信天线1、声呐探测器9、gps定位装置2
‑
3、卫星无线电台和主控电脑2
‑
7。船体6周围的双激光雷达传感器4和声呐探测器9探测船体6周围情况,双激光雷达传感器4和声呐探测器9会向周围障碍物发
射出红光束和声波,遇到物体反射后被双激光雷达传感器4、声呐探测器9捕获,双激光雷达传感器4、声呐探测器9产生的电信号经过放大器后,传输到主控电脑2
‑
7计算出光脉冲和声波在空中和水中的飞行时间,结合光速与声速即可得到被测物体距离激光雷达和声呐探测器9的距离,主控电脑2
‑
7根据所述距离向电机2
‑
10发出正常行驶或转向避开障碍的指令,从而调整双螺旋桨动力转向推进装置的工作状态,控制船体6行动的平衡方向和前进方向。所述双动力螺旋桨5由主控电脑2
‑
7对电机2
‑
10发出指令从而带动其自行转动,也可以进行差速转向,推动船体6前进,主控电脑2
‑
7发送信号控制双螺旋桨动力转向推进装置并实时检测电源情况。所述通信天线1能够实现信号接收和传递,在无人艇行驶过程中通信天线1接收地面基站通过卫星网络发送的地图信号,传递给主控电脑2
‑
7,当无人艇在行驶的过程中遇到大型障碍物时,主控电脑2
‑
7根据地图信号向电机2
‑
10发出停止、转弯、前进、后退指令;主控电脑2
‑
7可以根据通过卫星网络预先设定的航行路线的地图,预先规划出行驶路程,随着无人艇的航行,在航行过程中根据周围传感器发送传输的信息即时改变航向,调整具体的路线。所述锂电池组2
‑
6和太阳能发电装置构成了整个无人艇的电源,白天日照充足可以使用太阳能装置充电、供电,在阴雨天或者晚上则采用锂电池组2
‑
6供电。所述电机2
‑
10为整个无人艇的驱动电机2
‑
10,驱动双动力螺旋桨5的转动。当无人艇出现故障、船体6损坏或者因外部原因受困无法自主移动时候,主控电脑2
‑
7就会实施报警,即无人艇的主控电脑2
‑
7通过卫星网络向岸上救援方发出求救信号,同时发送gps定位装置2
‑
3的定位信息,岸上的救援人员通过卫星网络控制主控电脑2
‑
7,从而实现手动改变航线;若无法解决问题,可立即派人前往gps坐标点进行救援。
38.无人艇通过主控电脑2
‑
7在出发前可预先设定自动回航目的地,利用gps定位装置2
‑
3规划出最佳最短路径,通过控制电机2
‑
10,实现自主航行。
39.无人艇通过主控电脑2
‑
7、自主回航装置、无线通讯系统的结合,实现无人驾驶状态。
40.当被救人员登上无人艇后,启动无人艇上的主控电脑2
‑
7开关,通过卫星移动无线电台2
‑
5连接卫星网络,可预先通过主控电脑2
‑
7设定回航目的地,主控电脑2
‑
7利用gps定位装置2
‑
3规划出最佳最短路径,然后主控电脑2
‑
7通过检查确保整个无人艇的设备安全后出发,通过双激光雷达传感器4、声呐探测器9、电机2
‑
10控制船体6正常安全行驶;在行驶过程中,空气探测仪2
‑
4实时检测舱内氧气含量,氧气含量低时,主控电脑2
‑
7向氧气输送装置发送工作指令,两个氧气瓶7向封闭逃生舱2内供氧;在行驶途中,太阳能装置为整个无人艇提供供电,直至自主回航。
41.本实用新型的主要创新点为于全智能无人化和多功能,其中无人化主要体现在无人艇利用主控电脑2
‑
7,连接双激光雷达传感器4、声呐探测器9、gps定位装置2
‑
3和无线通讯系统,自动实现无人艇的航线规划、自主避障、远程控制,很大程度的提高的救援的效率。同时,船体6考虑到安全,设置了防火隔热罩,既保证了船体6的防火隔热性能,同时也大大增加了船体6的稳定性,船体6周围的充气橡胶圈11起到保护船体6的作用,有效减少船体6的损伤;同时设置了氧气输送装置,大大提高在密封舱体中的被救人员的救援成功率;太阳能发电装置延长了无人艇的工作时间,保证了船体6的持续供电;使用太阳能发电装置为设备提供充足的电力,能够利用主控电脑2
‑
7向岸上救援方发出求救信号并自动实现最短的回航路线规划。