1.本实用新型属于航行器技术领域,尤其是涉及一种变结构无人艇高海况下片体自动收放装置。
背景技术:
2.现阶段常规水面航行器的使用方式和使用海域条件比较单一,且适航性和耐波性较差,各技术层面对一种能够同时兼备长期、高速、较好适航性、且能够在恶劣海况下水面作业的无人航行器均有着迫切的需求。本技术所述的多航态变结构无人艇具有高速滑行艇的快速性和三体船的高耐波性,但高海况下主艇体周围常伴随着甲板上浪和海水抨击,这给片体的稳定作业、以及循环可靠的收回和释放带来了挑战,因此设计一套能够保证片体作业时其结构的稳定,并能够可靠地自由收放片体的装置则显得尤为迫切。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种变结构无人艇高海况下片体自动收放装置,实现高海况下片体的稳定作业、以及循环可靠的收回和释放,进而实现单体和三体形态两种航行状态间的任意切换,获得一种兼备高速滑行艇的快速性和三体船的高耐波性,能够根据海况条件自动调节航态的水面航行器。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种变结构无人艇高海况下片体自动收放装置,它包括主艇体、位于主艇体上方的弦外支架和在弦外支架两侧对称安装的两组片体自动收放机构,每组片体自动收放机构包括收放机构组件、支撑机构组件和片体,所述的支撑机构组件中部与弦外支架固接,下部连接片体,所述的收放机构组件位于支撑机构组件中间,且收放机构组件的上部与支撑机构组件的上部铰接,收放机构组件的下部铰接片体,支撑机构组件支撑收放机构组件,所述的收放机构组件释放相应的片体,无人艇以三体形态航行,所述的收放机构组件收回相应的片体,无人艇以单体形态航行。
6.进一步的,在主艇体的艇艉上方对称设置有弦尾支架和护弦,舭部对称设有三组防溅条,弦尾支架的上部连接弦外支架,三组所述防溅条分别对称安装在舭部、舭部与龙骨间以及龙骨处。
7.进一步的,所述支撑机构组件包括横向外套筒c、外套筒a、外套筒b、内套筒a和内套筒b,所述外套筒a和外套筒b对称焊接在横向外套筒c的两端;所述内套筒a的顶端滑动设置在外套筒a内,所述内套筒b的顶端滑动设置在外套筒b内,所述内套筒a 的底端和内套筒b的底端均与片体连接;在所述横向外套筒c的外壁中间焊接有连接耳板,所述连接耳板与收放机构组件连接。
8.进一步的,在片体上设有一个片体支座,所述内套筒a的底端与圆形法兰a连接,所述内套筒b的底端与圆形法兰b连接,所述圆形法兰a和圆形法兰b与片体的片体支座连接。
9.进一步的,所述收放机构组件包括连接支座和电动缸,所述电动缸包括同步带箱、
电机、电缸外壳、丝杆螺母机构和伸缩杆,所述电动缸固定在连接支座上,所述连接支座与连接耳板连接,电动缸的伸缩杆通过杆支座与片体的片体支座连接,电动缸的伸缩杆的伸出与缩回带动片体释放或收回。
10.进一步的,在外套筒a上和外套筒b上分别安装2个支撑底座,所述外套筒a和外套筒b通过支撑底座与弦外支架连接,在每个外套筒的顶端分别与一尾部端盖螺纹连接,在每个外套筒的底端分别与一密封端盖a螺纹连接,且在每个外套筒的顶端还分别设有一尾部挡板。
11.进一步的,所述电缸外壳的端部与密封端盖b螺纹连接。
12.进一步的,所述杆支座通过杆销轴与伸缩杆底端铰接,所述连接耳板通过连接销轴与连接支座连接。
13.进一步的,所述片体的横截面呈v字型。
14.相对于现有技术,本实用新型所述的一种变结构无人艇高海况下片体自动收放装置具有以下优势:
15.1、本实用新型通过自动收放装置中的支撑机构组件,能够在片体释放时帮助伸缩杆分担其所承受的前行阻力,并保证伸缩杆的结构的稳定性,使其可靠地进行伸缩,实现高海况下片体的稳定作业、以及循环可靠的收回和释放;
16.2、本实用新型通过变结构无人艇高海况下片体自动收放装置,能够实现单体和三体形态两种航行状态间的任意切换,能够获得一种根据海况条件自动调节航态的水面航行器;
17.3、本实用新型主艇体采用喷水推进技术,尖舭、艏部竖直;片体整体细长,艏部竖直且尖锐,横截面深v,以单体形态高速航行时可以获得更高的航速,恶劣海况下三体形态航行时可保证很好的耐波性;
18.4、本实用新型获得一种兼备高速滑行艇的快速性和三体船的高耐波性的无人水面航行器,可根据使命任务、深浅水域和外界环境自动进行航态调节,可以搭载丰富的水面、水下传感器设备,可广泛应用于海洋科研领域。
附图说明
19.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
20.图1是本实用新型中片体收起状态下无人艇的立体结构示意图;
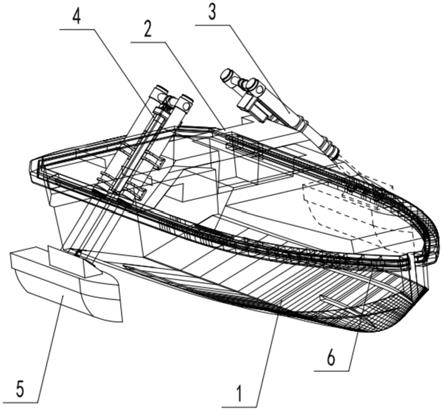
21.图2是本实用新型中片体释放状态下无人艇的立体结构示意图;
22.图3是本实用新型中主艇体及弦外支架的立体结构示意图;
23.图4是某一角度的本实用新型中片体自动收放机构释放状态下立体结构示意图;
24.图5是另一角度的本实用新型中片体自动收放机构释放状态下立体结构示意图;
25.图6是本实用新型中片体自动收放机构收起状态下结构示意图;
26.图7是本实用新型中片体自动收放机构释放状态下的正视图;
27.图8是本实用新型中支撑机构组件结构剖视图;
28.图9是本实用新型中收放机构组件结构剖视图;
29.图10是本实用新型中片体的结构示意图。
30.附图标记说明:
31.1、主艇体,2、弦外支架,3、支撑机构组件,4、收放机构组件,5、片体,6、护弦,7、弦尾支架,8、防溅条,9、片体支座,10a、外套筒a,10b、外套筒b,10c、横向外套筒c,11a、内套筒a,11b、内套筒b,12、支撑底座,13、电缸外壳,14、伸缩杆,15、连接耳板,16、连接支座,17a、圆形法兰a,17b、圆形法兰b,18、杆支座, 19、同步带箱,20、杆销轴,21、连接销轴,22、密封端盖a,23、尾部端盖,24、尾部挡板,25、电机,26、密封端盖b。
具体实施方式
32.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
33.下面将参考附图并结合实施例来详细说明本实用新型。
34.如图1
‑
图10所示,一种变结构无人艇高海况下片体自动收放装置,包括主艇体1、位于主艇体1上方的弦外支架2和在弦外支架2两侧对称安装的两组片体自动收放机构,每组片体自动收放机构包括收放机构组件4、支撑机构组件3和片体5,所述的支撑机构组件3中部与弦外支架2固接,下部连接片体5,所述的收放机构组件4位于支撑机构组件3中间,且收放机构组件4的上部与支撑机构组件3的上部铰接,收放机构组件4的下部铰接片体5,支撑机构组件3支撑收放机构组件4,所述的收放机构组件4释放相应的片体5,无人艇以三体形态航行,所述的收放机构组件4收回相应的片体5,无人艇以单体形态航行。
35.在主艇体1的艇艉上方对称设置有弦尾支架7和护弦6,舭部对称设有三组防溅条8,弦尾支架7的上部连接弦外支架2,三组所述防溅条8长度不一,分别对称安装在舭部、舭部与龙骨间以及龙骨处。所述主艇体1方艉、尖舭、且艏部竖直,主要由铝和金、不锈钢制成;所述弦外支架2和弦尾支架7流线型设计,二者配合上层建筑,采用楔形体方式连接,具备一定的稳定性。
36.支撑机构组件3包括横向外套筒c 10c、外套筒a 10a、外套筒b 10b、内套筒a 11a 和内套筒b 11b,所述外套筒a 10a和外套筒b 10b对称焊接在横向外套筒c 10c的两端;所述内套筒a 11a的顶端滑动设置在外套筒a 10a内,所述内套筒b 11b的顶端滑动设置在外套筒b 10b内,所述内套筒a 11a的底端和内套筒b 11b的底端均与片体5连接;在所述横向外套筒c 10c的外壁中间焊接有连接耳板15,所述连接耳板15与收放机构组件4连接。
37.在片体5上设有一个片体支座9,所述内套筒a 11a的底端与圆形法兰a 17a连接,所述内套筒b 11b的底端与圆形法兰b 17b连接,所述圆形法兰a 17a和圆形法兰b 17b 均与片体5的片体支座9连接。在外套筒a 10a上和外套筒b 10b上分别安装2个支撑底座12,所述外套筒a 10a和外套筒b 10b通过支撑底座12与弦外支架2连接,在每个外套筒的顶端分别与一尾部端盖23螺纹连接,在每个外套筒的底端分别与一密封端盖a 22螺纹连接,且在每个外套筒的顶端还分别设有一尾部挡板24,如此设置实现了连接端口处的密封与紧固连接。
38.收放机构组件4包括连接支座16和电动缸,所述电动缸固定在连接支座16上,所述连接支座16与连接耳板15连接,电动缸的伸缩杆通过杆支座18与片体5的片体支座 9连接,电动缸的伸缩杆的伸出与缩回带动片体释放或收回。
39.所述电动缸的结构及工作原理均属于现有技术,所述电动缸包括同步带箱19、电机 25、电缸外壳13、丝杆螺母机构和伸缩杆14,所述同步带箱19固定在连接支座16上,在同步带箱19的侧部连接有电机25,在同步带箱19的中心处连接电缸外壳13,所述丝杆螺母机构设置在电缸外壳13内,丝杆螺母机构的丝杆与同步带箱连接,伸缩杆14固定在丝杆螺母机构的螺母上,伸缩杆14的底端通过杆支座18与片体5的片体支座9连接,所述电缸外壳13的端部与密封端盖b 26螺纹连接。具体的,所述杆支座18通过杆销轴20与伸缩杆14底端铰接,所述连接耳板15通过连接销轴21与连接支座16连接。电机25带动同步带箱19内的主动轮转动,主动轮通过同步带带动从动轮转动,从动轮带动丝杆旋转,丝杆旋转的同时带动螺母直线运动,从而带动伸缩杆的伸缩运动。
40.所述支撑机构组件3的内套筒a 11a和内套筒b 11b协同伸缩杆14收放片体5,能够在片体5释放时帮助伸缩杆14分担其所承受的前行阻力,并保证伸缩杆14结构稳定,其循环可靠地伸缩,进行作业,不至于因阻力过大使其变形,影响对片体5的收起;另外,在片体5被收起,无人艇以单体形态高速航行时,伸缩杆14两侧的内套筒a 11a和内套筒b 11b可以进一步保证伸缩杆14的结构稳定,并防止其它收放装置组件因甲板上浪和海水的抨击遭到破坏;
41.所述收放机构组件4可实现片体5、支撑机构组件3的内套筒a 11a和内套筒b 11b 自由同步地伸缩,保证航行器中低海况高速航行、高海况低速稳定航行,单体和三体形态两种航行状态的切换,能够在兼顾快速性的同时,应对更为复杂恶劣的海况条件;
42.所述片体5的横截面呈v字型,片体5整体细长,艏部竖直且尖锐,横截面呈深v 型,具备很好的穿浪能力和阻力特性。
43.本技术的工作过程为:当变结构无人艇遭遇高海况或更恶劣的海况时,通过电机25 推动收放机构组件4的伸缩杆14下放片体5,同时支撑机构组件3的内套筒a 11a和内套筒b 11b同步地被伸缩杆14协同推出,伸缩杆14、内套筒a 11a、内套筒b 11b和片体5协同作业,共同保证无人艇以三体形态稳定地航行;
44.当变结构无人艇处于中低海况或更平静的海面上时,通过电机25拉动收放机构组件 4的伸缩杆14收起片体5,同时支撑机构组件3的内套筒a 11a和内套筒b 11b同步地被伸缩杆14协同拉回,整套支撑机构组件3进一步保证伸缩杆14的结构稳定,并防止其它收放装置组件因甲板上浪和海水的抨击遭到破坏,从而使无人艇以单体形态高速稳定地航行在稍平静的海面上。
45.本技术的变结构无人艇高海况下片体自动收放装置,可实现低中海况和高海况下无人艇的片体的自动收放,单体和三体形态两种航行状态间的任意切换,并保证片体释放过程中结构的稳定和可靠。本实用新型能够使无人艇同时兼备高速滑行艇的快速性和三体船的高耐波性,根据任务要求和海域环境可自动进行航态调节,可完成水下一水面通信中继与导航、海洋测绘与科学调查、环境监测、水文调查、气象预报等任务。
46.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。